实验一 基于Matlab及Simulink的机电系统仿真
一、实验目的
1.掌握机电系统的工程问题简化及建模的方法,会根据基本原理和规律建立数学模型。
2.根据数学模型建立仿真模型(传递函数、Simulink及状态空间模型)并进行时域和频域分析。
3.熟悉Matlab环境,并运用该工具开展仿真分析。
4.会根据仿真结果对系统进行校正。
二、实验内容
(一)不考虑刚度的情况进行以下内容实验:
(1)根据数学模型求系统的电压输入和转速的传递函数,并进行时域的阶跃响应分析并绘制时域响应曲线,并根据阶跃相应求电机的机电时间常数(电机的机电时间常数,是电动机从启动到转速达到空载转速的63.2%时所经历的时间)。
(2)编制MATLAB或Simulink程序求电机的调速特性,即不同负载力矩(学号后三位数字,x10,x100)情况下电压和转速之间的关系,填入下表,有效数据不少于20项,并在同一图中绘制出调速特性曲线。
表2 数据表表头格式
| 序号 |
电压(V) |
转速(rad/s) |
|||
| 空载 |
负载力矩M1=学号后三位数字 |
负载力矩M1=学号后三位数字x10 |
负载力矩M1=学号后三位数字x100 |
||
编制MATLAB或Simulink程序求电机的机械特性图,即不同电压情况下负载力矩和转速之间的关系。
(二)考虑刚度的情况进行以下内容实验:
(1)根据数学模型求系统的电压输入和转速的传递函数,并进行时域的阶跃响应分析并绘制时域响应曲线。
(2)建立系统的状态方程模型,并进行时域的阶跃响应分析,系统的能控性和能观性、特征值计算;以及根据状态空间模型求解电压输入和转速的传递函数,并与(1)的传递函数进行对比。
(3)根据数学模型建立Simulink模型,并进行仿真,获得仿真曲线,并根据simulink仿真模型求其传递函数。
(4)绘制系统传递函数方框图,并求系统电压输入和转速为输出的开环传递函数,绘制零极点分布图、奈氏图、伯德图;并利用频域分析方法判定系统的稳定性及相对稳定性计算。
(5)求出从
正在上传…重新上传取消到的传递函数模型,并求其频率特性和根轨迹。
(6)分别取k12=0.1k12和k12=0.01k12,编制MATLAB或simulink程序,比较刚度系数不同时电机-负载模型的频率特性。
三、实验设计
1、实验的背景
技术的应用:1、MATLAB仿真的应用在各种领域,包括信号和图像处理、通讯、控制系统设计、测试和测量、财务建模和分析以及计算生物学等众多应用领域。附加的工具箱(单独提供的专用妳MATLAB函数集〉扩展了MATLAB环境,以解决这些应用领域内特定类型的问题。
2、MATLAB把工具箱延伸到了科学研究和工程应用的诸多领域,诸如数据采集、数据库接口、概率统计、样条拟合、优化算法、偏微分方程求解、神经网络、小波分析、信号处理、图像处理、系统辨识、控制系统设计、LMI控制、鲁棒控制、模型预测、模糊逻辑、金融分析、地图工具、非线性控制设计、实时快速原型及半物理仿真、嵌入式系统开发、定点仿真、DSP与通讯、电力系统仿真等。
技术的发展:
20世纪70年代中期,Cleve Moler博士和其同事在美国国家科学基金的资助下开发了调用EISPACK和LINPACK的 FORTRAN子程序库。EISPACK是特征值求解的FORTRAN程序库,LINPACK是解线性方程的程序库。在当时,这两个程序库代表矩阵运算的最高水平。
到20世纪70年代后期,身为美国New Mexico大学计算机系系主任的Cleve Moler,在给学生讲授线性代数课程时,想教学生使用EISPACK 和LINPACK程序库,但他发现学生用FORTRAN编写接口程序很费时间,于是他开始自己动手,利用业余时间为学生编写EISPACK和 LINPACK的接口程序。Cleve Moler给这个接口程序取名为 MATLAB,该名为矩阵(matrix〉和实验室( laboratory)两个英文单词的前三个字母的组合。在以后的数年里,MATLAB在多所大学里作为教学辅助软件使用,并作为面向大众的免费软件广为流传。1983年春天,Cleve Moler到Stanford大学讲学,MATLAB深深地吸引了工程师John Little。John Little敏锐地觉察到MATLAB在工程领域的广阔前景。同年,他和 Cleve Moler、Sieve Bangert一起,用C语言开发了第二代专业版。这一代的MATLAB语言同时具备了数值计在算和数据图示化的功能。1984年,Cleve Moler和 John Lithe成立了MathWorks公司,正式把MATLAB推向市场,并继续进行MATLAB的研究和开发。
在当今30多个数学类科技应用软件中,就软件数学处理的原始内核而言,可分为两大类。一类是数值计算型软件,如MATLAB、Xmath、Gauss等,这类软件长于数值计算,对处理大批数据效率高;另一类是数学分析型软件,如Mathematica、Maple等,这类软件以符号计算见长,能给出解析解和任意精度解,其缺点是处理大量数据时效率较低。MathWorks公司顺应多功能需求之潮流,在其卓越数值计算和图示能力的基础上,又率先在专业水平上开拓了其符号计算、文字处理、可视化建模和实时控制能力,开发了适合多学科、多部门要求的新一代科技应用软件MATLAB。经过多年的国际竞争,MATLAB已经占据了数值型软件市场的主导地位。
在MATLAB进入市场前,国际上的许多应用软件包都是直接以FORTRAN和C语言等编程语言开发的。这种软件的缺点是使用面窄、接口简陋、程序结构不开放以及没有标准的基库,很难适应各学科的最新发展,因而很难推广。MATLAB的出现,为各国科学家开发学科软件提供了新的基础。在MATLAB问世不久的2O世纪80年代中期,原先控制领域里的一些软件包纷纷被淘汰或在MATLAB上重建。MathWorks 公司1993年推出了MATLAB 4.0版,1995年推出4.2C版(forwin3.X) 1997年推出5.0版。1999年推出5.3版。MATLAB 5.X较MATLAB 4.X无论是界面还是内容都有长足的进展,其帮助信息采用超文本格式和PDF格式,在Netscape 3.0或IE4.0及以上版本,Acrobat Reader中可以方便地浏览。
时至今日,经过Math Works公司的不断完善,MATLAB已经发展成为适合多学科、多种工作平台的功能强劲的大型软件。在国外,MATLAB已经经受了多年考验。在欧美等高校,MATLAB已经成为线性代数、自动控制理论、数理统计、数字信号处理、时间序列分析、动态系统仿真等高级课程的基本教学工具;成为攻读学位的大学生、硕士生、博士生必须掌握的基本技能。在设计研究单位和工业部门,MATLAB被广泛用于科学研究和解决各种具体问题。
分析的意义:MATLAB和simulink仿真技术提高了科学研究水平,缩短了科学研究周期,降低了科学研究成本及风险,促进了各种不同领域学科融合、加速了科研成果转化为生产力。可以说仿真技术已成为科学研究中必不可少的使用技术。在没有出现MATLAB以前,任何研究到实验阶段都必须在硬件上实现,而MATLAB的使用使这些浪费研究资源的行动得以停止,在计算机平台上借助于MATLAB建立一个研究模型,对其输入各种参数,从而得出结果。发现其中问题后,再次改动只需改动模型,而不必改动繁琐的硬件,在研究领域得到了质的飞跃。节省了研究资源,加速了科学研究速度。
2、实验原理的设计:
由于直流电动机具有良好的启动和调速性能,常应用于对启动和调速有较高要求的场合。如大型可逆式轧钢机、矿井卷扬机、宾馆高速电梯、龙门刨床、电力机车、耐燃机车、城市电车、地铁列车、电动自行车、造纸和印刷机械、船舶机械、大型精密机床和大型起重机等生产机械中。
1.不考虑传动轴结构刚度的直流电机传动系统建模
直流电机电枢回路的电路方程是:
(1.1)
其中,是加到电机两端的电压;
是电机反电势;
是电枢电流;
是电枢回路总电阻;
是电枢回路总电感;
称为电枢回路电磁时间常数。
并且反电动势与电机角速度成正比:
(1.2)
其中,称为反电势系数;
为0
对于电机而言,其转动轴上的力矩方程为:
(1.3)
其中,是电机的力矩系数;
是负载力矩;
是电机电枢的转动惯量。
2、考虑传动轴结构刚度的直流电机传动系统建模
电机与负载是直接耦合的,但转动轴本质上是弹性的,存在形变,而且轴承和框架也都不完全是刚性的。对于加速度要求大、快速性和精度要求高的系统或是转动惯量大、性能要求高的系统,弹性形变对系统性能的影响不能忽略,因此在建立类似的电机-负载模型时,轴的刚度系数,即单位转角产生的力矩是一个重要参数。
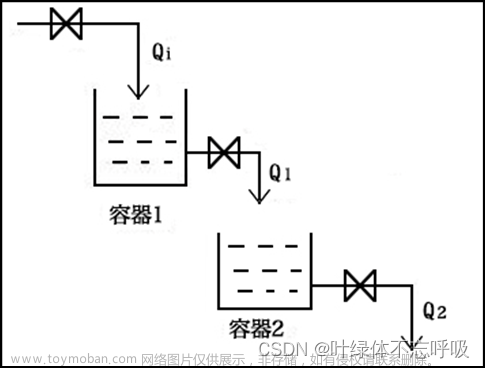
考虑到以上各种弹性体,可将被控系统视为图1所示结构,由电机、纯惯性负载以及连接二者的等效传递轴所组成的三质量系统。
图1 直流电动机传动机构负载模型
根据上面的分析并忽略轴的转动惯量,可以列出整个系统的电学方程以及动力学方程:
电动机:
(2.1)
(2.2)
(2.3)
负载:
(2.4)
(2.5)
其中,和分别表示电动机转子和负载的转角;
、、和分别表示电动机电枢电流,电枢电压,电枢电感和电枢电阻;
、分别为电动机转子和负载的转动惯量;
表示电机的负载力矩;
和分别表示电机的电磁力矩系数和反电势系数;
表示轴的刚度系数;
和分别表示电机和框架的粘性阻尼系数。
一般地,弹性变形与机械装置的结构、尺寸、材料和受力情况有关。从系统特性分析,弹性变形使执行轴转角和负载转角之间存在一个振荡环节,从复平面上看,该振荡环节对应一对距离虚轴很近的共轭复根,阻尼系数小。这样的震荡环节具有较高的谐振峰值。如果谐振频率处于系统通频带之外,则可认为其对系统动态性能无影响;反之,若谐振频率处于系统通频带之内,则对系统影响较大。
实验参数如表1.
表1实验所需具体参数
| 参数 |
参数值 |
备注 |
| 电枢电阻Ra |
4.80Ω |
|
| 电枢电感La |
21mH |
|
| 力矩系数km |
46.32N.m/A |
|
| 反电势系数ke |
55.3V/(rad/s) |
|
| 电机转动惯量Jm |
0.5Kg.m2 |
电枢部分 |
| 电机阻尼系数Dm |
40Nm/(rad/s) |
|
| 负载转动惯量JL |
25 Kg.m2 |
折合到转动轴上 |
| DL+Dm |
270Nm/(rad/s) |
|
| 轴刚度k12 |
32000Nm/度 |
建模时应转换为国际标准单位 |
四、实验步骤
工程1:(一)不考虑刚度的情况进行以下内容实验:
clear ; Ra=4.8; La=0.021; Km=46.32; Ke=55.3; Jm=0.5; T1=La/Ra; M1=0; num=[-M1*Ra*T1 Km-M1*Ra] ; den=[Ra*Jm*T1 Ra*Jm Km*Ke]; sys=tf (num,den) y=step(sys) ; step(sys); 得到最终的传递函数和阶跃响应如图所示:
得到电机的稳态值大概是0.0182,电机的机电时间常数(电机的机电时间常数,是电动机从启动到转速达到空载转速的63.2%时所经历的时间),所以0.0182×0.632大概=0.0114,然后找到对应的点,看到其对应的时间大概是0.0027s。
结论:电机有超调量并且要振荡,稳定性差,但是快速性好,能够很快的手链到稳态值。
(2)编制MATLAB或Simulink程序求电机的调速特性,即不同负载力矩(学号后三位数字,x10,x100)情况下电压和转速之间的关系,填入下表,有效数据不少于20项,并在同一图中绘制出调速特性曲线。
表2 数据表表头格式
序号
电压(V)
转速(rad/s)
空载
负载力矩M1=学号后三位数字
负载力矩M1=学号后三位数字x10
负载力矩M1=学号后三位数字x100
0
0
0
-0.5845
-5.845
-58.45
1
10
0.1812
-0.4054
-5.684
-58.47
2
20
0.3624
-0.2242
-5.503
-58.29
3
30
0.5436
-0.04298
-5.322
-58.11
4
40
0.7247
-0.1382
-5.141
-57.93
5
50
0.9059
-0.3194
-4.959
-57.75
6
60
1.087
0.5002
-4.779
-57.57
7
70
1.267
0.6805
-4.598
-57.39
8
80
1.448
0.8613
-4.418
-57.21
9
90
1.629
1.042
-4.236
-57.02
10
100
1.810
1.224
-4.055
-56.84
11
110
1.991
1.404
-3.874
-56.66
12
120
2.173
1.586
-3.693
-56.48
13
130
2.354
1.768
-3.511
-56.30
14
140
2.535
1.948
-3.331
-56.12
15
150
2.716
2.129
-3.150
-55.94
16
160
2.898
2.311
-2.968
-55.76
17
170
3.079
2.492
-2.786
-55.57
18
180
3.260
2.674
-2.605
-55.39
19
190
3.444
3.316
-2.424
-55.12
20
200
3.621
3.035
-2.244
-55.03
编制MATLAB或Simulink程序求电机的调速特性,即不同负载力矩(学号后三位数字,x10,x100)情况下电压和转速之间的关系,填入下表,有效数据不少于20项,并在同一图中绘制出调速特性曲线。
表2 数据表表头格式
图4电机的调速特性的simulink图
同一图中绘制出调速特性曲线:把四中不同情况的负载力矩图像点击Logging,把四种情况发到工作空间并运
plot(out.ScopeData3(:,1),out.ScopeData3(:,2),'k',out.ScopeData5(:,1),out.ScopeData5(:,2),'b--',out.ScopeData6(:,1),out.ScopeData6(:,2),'r--',out.ScopeData7(:,1),out.ScopeData7(:,2),'g--'),





图5调速特性曲线
结论:由此图可以看出随着电压的增大,在负载力矩不变的时候,转速会跟着电压增大而增大。
(3)编制MATLAB或Simulink程序求电机的机械特性图,即不同电压情况下负载力矩和转速之间的关系。
思路:因为要求不同电压下不同的输入负载,所以把输入的负载用一个一次函数表示,我取的是y=100x+c;


图7 机械特性图
结论:在电压不变的情况下,转速随着负载力矩的增大而减小;同时电机的机械特性硬,力矩增大,但是变化很小,我的图仿真时间为2000s,变化情况才比较看得出来。
工程2:(二)考虑刚度的情况进行以下内容实验:
(1)根据数学模型求系统的电压输入和转速的传递函数,并进行时域的阶跃响应分析并绘制时域响应曲线。
同样通过计算已经给定的相关数据算出传递函数:
km=46.32;
Ra=4.8;
La=0.021;
Jm=0.5;
J1=25;
Dm=40;
D1=230;
ke=55.3;
k12=1833519;
a0=0;
a1=k12*Ra*Dm+km*ke*k12+k12*Ra*D1;
a2=Ra*Dm*D1+km*ke*D1+k12*Ra*Jm+Dm*La*k12+k12*Ra*J1+D1*La*k12;
a3=Ra*Dm*J1+Ra*Jm*D1+La*Dm*D1+km*ke*J1+k12*La*Jm+J1*La*k12;
a4=La*Jm*D1+Ra*Jm*J1+J1*Dm*La;
a5=La*Jm*J1;
num=[km*J1 D1*km km*k12 0] ;
den=[a5 a4 a3 a2 a1 a0];
sys=tf(num,den)
y=step(sys) ;
step(sys);
grid on;
图9 阶跃响应图像
 图10 传递函数
图10 传递函数
建立系统的状态方程模型,并进行时域的阶跃响应分析,系统的能控性和能观性、特征值计算;以及根据状态空间模型求解电压输入和转速的传递函数,并然后把X1、X2、X3、X4、X5的一阶导的A、B、C、D函数化出来,依据这个写出对应的代码,得到时域的阶跃响应,如图:与(1)的传递函数进行对比。
在慕课搜索《现代控制理论》浙江大学版1.2.1章,根据视频例题将本题状态空间算出来了。先将每个复杂模块化成对应的最简单回路,然后将简单回路代替原理的方框图,并在图上标记X1、X2、X3、X4、X5和X1、X2、X3、X4、X5的一阶导,这个时候他们的关系就非常明确。

图12 时域的阶跃响应图
阶跃响应代码:km=46.32; Ra=4.8; La=0.021; Jm=0.5; J1=25; Dm=40; D1=230; ke=55.3; k12=1833519; a0=0; A=[0 1 0 0 0 ; -K12/Jm -Dm/Jm 0 k12/Jm 1/Jm; k12/J1 0 -DL/J1 -k12/J1 0; 0 0 1 0 0; 0 -ke*km/La 0 0 -Ra/La ]; B=[0 0 0 0 Km/La]'; C=[1 0 0 0 0]; D=0; sys1=ss(A,B,C,D); q=tf([1 0],[0 1]); sysm=zpk(sys1)*q step(sysm) ;能控性和能观性代码:
M=[B,A*B,A^2*B,A^3*B,A^4*B] rankM=rank(M) N=[C,C*A,C*A^2,C*A^3,C*A^4] rankN=rank(N)特征值与特征向量的代码
[m,n]=eig(A) diag(n)
图16 状态空间模型求传递函数
状态空间模型求传递函数代码:
[a,b]=ss2tf(A,B,C,D,1) h=zpk([a,b])
图17的传递函数 图18的传递函数
结果:经过对比(1)的函数化简之后与(2)的传递函数一致。
根据数学模型建立Simulink模型,并进行仿真,获得仿真曲线,并根据simulink仿真模型求其传递函数。
图19 Simulink模型
图20仿真曲线





传递函数:可以从simulink方框图转传递函数,所以我在网上找到了方法(链接https://wenku.baidu.com/view/9bd6b90f4873f242336c1eb91a37f111f1850d82.html)在simulink点击→apps→ →
→ (1.在A哪里有四十I/Os选择root level inports and outports.2.点击result viewer.3.选择一个伯德图或者奈斯图)→
(1.在A哪里有四十I/Os选择root level inports and outports.2.点击result viewer.3.选择一个伯德图或者奈斯图)→ 或者
或者 最终根据题的要求就得到相应形式的传递函数。
最终根据题的要求就得到相应形式的传递函数。
(4)绘制系统传递函数方框图,并求系统电压输入和转速为输出的开环传递函数,绘制零极点分布图、奈氏图、伯德图;并利用频域分析方法判定系统的稳定性及相对稳定性计算。
方法一:直接硬算它的开环传递函数,
代码:km=46.32;
Ra=4.8;
lLa=0.021;
Jm=0.5;
J1=25;
Dm=40;
D1=230;
ke=55.3;
k12=32000*180/pi;
sys1=tf([0 km],[La,Ra]);
sys2=tf([0 1],[Jm,Dm]);
sys3=tf([k12*J1,k12*D1],J1,D1,k12]);
sys4=minreal(sys2/(1+sys2*sys3));
sys6=tf([o ke],[0 1]);
sys5=minreal(sys1*sys4*sys6);
num=[243952,2.244e06,1.789e10,0 ];
den=[1,317.8,3.761e06,8.947e08,9.052e09]
subplot(2,2,1),zplane(num, den);grid on
subplot(2,2,2),bode(sys5);grid on
subplot(2,2,3),nyquist(sys5);grid on方法二:由上一题的方法我把开环传递函数方框图画出来,用同样的方式可直接得到零极点分布图、奈氏图、伯德图与开环传递函数。

图22零极点分布图

图23奈氏图


图25开环传递函数
频域判定方法:由零极点分布图可知全部的特征根都具有负实部;传递函数的全部极点都在[s]平面的左半部分所以系统稳定,
由奈氏图可知:对于开环系统奈氏系统,它的开环nyquist轨迹不包围(-1.0)点,则其闭环系统稳定。
有伯德图可知:上图单位为db是幅值裕度,下图单位为deg是相位裕度,由开环系统的对数幅频特性曲线比对数相频特性先交于横轴,则闭环系统稳定,此伯德图刚好满足,所以闭环系统稳定。
求出从到的传递函数模型,并求其频率特性和根轨迹。
先解出传递函数
传递函数代码:
Jl=25;
Dl=230;
k12=32000*180/pi;
num=[k12];
den=[Jl Dl k12];
sys=tf(num,den);
bode(sys)
margin(sys)
figure(2);
num1=[k12];
den1=[Jl Dl 0];
sys1=tf(num1,den1);
rlocus(sys)
axis([-50 50 -1000 1000]);得到伯德图与根轨迹的图:
图27伯德图与根轨迹
从伯德图看出传递函数有超调量,通过根轨迹可以看出传递函数有两个共轭复根,表明传递函数系统的阻尼系数小、振荡强、稳定性不是很好。
分别取k12=0.1k12和k12=0.01k12,编制MATLAB或simulink程序,比较刚度系数不同时电机-负载模型的频率特性
本题我还是利用simulink结构图找到传递函数,最后根据传递函数编写代码找到他们的频率特性图。先将k12=183351.9赋值给k12,然后运行simulink结构图,通过simulink转化得到一个传递函数。

图28 Simulink方框图

图29 k12=183351.9的传递函数
然后将k12=18335.19赋值给k12,然后运行simulink结构图,通过simulink转化得到另一个传递函数。

图30 k12=18335.19的传递函数
然后根据这两个传递函数写出对应的传递函数代码:
den1=[1 317.8 6.391e05 9.186e07 2.694e09 0.0003679];
num2=[3.235e06];
den2=[1 317.8 3.025e05 1.136e07 2.694e08 3.428e-06];
sys1=tf(num1,den1);
sys2=tf(num2,den2);
bode(sys1,sys2);
margin(sys1,sys2);求得他们的伯德图,并利用margin函数把两个函数的图集中在一个图里面方便对比,能够看出他们的不同。

图31 两函数的伯德图
图31 两函数的伯德图
从伯德图中可以看出蓝色线条是k12=183351.9的函数伯德图,橙色是
k12=18335.19的函数伯德图,当k12(刚度系数)变大的时候函数的幅值裕度会变大,表明刚度系数越大,整个系统的稳定性越好,反应时间更快,抗干扰能力更强。
- 思考题
状态方程分析的阶跃响应会出现多个响应曲线图,分别代表什么意思?
答:阶跃响应的响应函数就是反应整个系统的稳定性,更能反应系统的内部状态变化,多个就是反应时域分析是分析上升时间、峰值时间、最大超调量、调整时间、震荡次数。
为什么进行时域分析用的是闭环传递函数,而用频域分析通常分析的是系统的开环传递函数?开环传递函数如何表征系统的特性的?
答:时域分析用闭环函数是因为时域分析是分析上升时间、峰值时间、最大超调量、调整时间、震荡次数等,只有闭环系统才能描绘动态特性这些并判断系统的稳定性。
频域分析用开环是因为,首先闭环求解相对于开环函数更加复杂,第二对于闭环的稳定性,可以通过开环传函(如根轨迹,频域的相对裕度)进行分析,对于闭环系统的性能,则需要根据闭环的零极点分布来确定。将模型转化换到频率域研究。从而使复杂的计算过程变成直观的图示形式,并将系统动静态性能以新的指标形式清晰地展现出来。
查阅相关资料,了解Matlab中的slLinearizer、getIOTransfer,getLoopTransfer,getSensitivity和getCompSensitivity这些函数的功能,并进行示例说明。
slLinearizer:可以在不同的工作点交互线性化模型,通过修剪或模拟模型交互获得工作点,执行非线性模型的精确线性化,及非线性模型的频率响应;针对不同参数值批量生成线性化模型,用于执行线性化任务的MATLAB代码。
例:
getIOTransfer:对sllinear或slTuner接口的指定I/O集的传递函数进行使用。用法如下:sys = getIOTransfer(s,in,out,temp_opening) 在temp_opening指定考虑额外的输入。例如,在反馈回路打开的情况下,使用输入来获得与设备串联的控制器的传递函数。

获取ex _ scd _ simple _ fdbk模型从参考信号r到工厂输出y的闭环传递函数。
打开Ex _ Scd _ Simple _ Fdbk模型。
getSensitivity:使用sllinear或slTuner接口的指定点灵敏度函数,用法如下linsys = getSensitivity(s,pt,temp_opening) ,在temp_opening指定的点考虑额外的临时洞口。例如,使用开口来计算外环打开时内环的灵敏度函数。

getCompSensitivity:使用sllinear或slTuner接口在指定点实现互补灵敏度功能。用法如下:linsys = getCompSensitivity(s,pt),返回与sl线性化器或slTuner接口s相关的模型在指定分析点的互补灵敏度函数,软件在计算linsys时会强制执行为s指定的所有永久开口。配置s.Parameters和/或s.OperatingPoints,getCompSensitivity将执行多次线性化,并返回一组互补的灵敏度函数。例:
4简述电机机电时间常数的含义以及物理意义,对电机动态特性的影响。
含义:机电时间常数用来描述机电传动系统过渡过程的快慢。
物理意义:是电动机从启动到转速达到空载转速的63.2%时所经历的时间。加快机电传动系统的过渡过程有。有两种方法:1.减少系统的飞轮转矩GD2,2.增加动态转矩Td.
很多同学说看不到图片,我直接将实验报告文档分享出来文章来源:https://www.toymoban.com/news/detail-488771.html
链接:https://pan.baidu.com/s/1j61VciCExGhS3uP4_y2usQ
提取码:9999文章来源地址https://www.toymoban.com/news/detail-488771.html
到了这里,关于基于Matlab及Simulink的机电系统仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!