(Q有答疑)康耐视智能相机Insight-药品检测

Line Sync Source(选择触发信号):
①None:表示关闭外触发,此时相机处于Free-Run(自由采集)模式;
②Internal Line Trigger:表示采集卡按照固定的频率发出行信号触发相机拍照,频率可在下面的”Internal Line Trigger Frequency(in HZ)”栏里设置;
注:内触发模式可1:1模拟机台运动速度来达到测试目的,无需外接编码器触发相机拍照。
③External Line Trigger:表示采集卡接收外部触发信号,然后向相机发出行信号触发相机拍照,一般外触发信号为TTL电平信号时选用此选项;
④Shaft Encoder input:表示采集卡接收编码器信号,然后向相机发出行信号触发相机拍照。
Camera Line Trigger Frequency Max(Min):触发相机拍照的信号由采集卡提供时,需设置最大触发行频和最小触发行频,当设置的数值超出范围时,程序会报警。
Camera Control Method selected用来选择相机拍照的控制方式,包括Line Trigger(单脉冲信号触发)和Line Integration(双信号联合触发)两种,其中每一种方式均可选择设置脉冲信号的具体参数。(注:当Line Integration Method Setting或Line Trigger Method Setting有具体设置时,才会有Line Trigger、Line Integration选项,否则为None)
Line Integration Method Setting点击后弹出如下对话框,共有四种脉冲输出方式。该控制方式一般输出两个脉冲信号,如下图所示曝光时间由Pulse #0和Pulse #1共同决定。只有比较复杂的触发方式会选择这种方法。
Line Trigger Method Setting点击后弹出如下对话框:
只有一种脉冲信号输出方式,适用于比较简单的触发方式。通过时序图可以看出,当采集卡接收到一个外触发信号(External Trigger)时,通过Delay和Duration会产生一个Pulse #1,其中Pulse #1的脉冲宽度、极性、延时均可手动设置,图中Pulse #1在下降沿的时候控制相机进行拍照。
拓展:
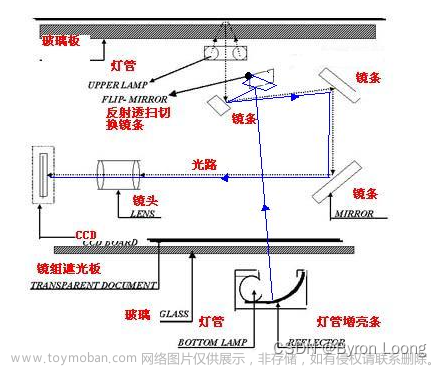
如下图所示,DALSA P3系列线扫相机常规有6种曝光模式,其中SYNC指的是同步信号,PRIN为像素复位(电荷清零)信号,上文中Line Integration控制方式内输出的两个脉冲信号即为SYNC和PRIN,双信号组合控制相机拍照。LA-CM系列相机曝光原理与此基本一致。
Strobe Method Setting:采集卡开始帧信号输出功能。采集卡每开始采集一张图片的时候,会输出一个开始采集的帧信号,利用该信号可将CCD图像坐标系、PLC编码器脉冲坐标系、涂布路程坐标系三者关联起来,控制打标精度。Strobe Method Setting点击后弹出如下对话框:
其中需设置Strobe Duration(低电平保持时间),建议保持时间大于等于4倍的PLC扫描周期,防止因PLC刷新频率过低导致信号丢失。

关于Line Integration 和Line Trigger,DALS官方文档《SaperaAcqParms》内有详细解释,感兴趣的可查阅该文档“Camera Control Method Definitions”部分内容。文章来源:https://www.toymoban.com/news/detail-489047.html
Line Trigger Auto Delay:延时拍照功能
Time Stamp Base(延时单位):Line Count(基于行高延时);External line Trigger(基于外触发信号延时);Shaft Encoder(基于编码器信号延时);100 Nanoseconds(延时100纳秒拍照)。
Board Sync Output 1 Source:卡间同步信号1.
Board Sync Output 2 Source:卡间同步信号2.
注:卡间同步功能请参考下文使用说明部分,在此不多赘述;另外需深入了解卡间同步功能的请参考Xtium-CL MX4官方用户手册Board Sync Cable Assembly OR-YXCC-BSYNC40部分,卡间同步排线可在淘宝购买获得。
CC1、CC2、CC3、CC4:CC(Camera Control)定义为采集卡控制相机的端口。Camera Link接口中总共有四个端口控制相机。CC可以定义为High(一直为高电平),Low(一直为低电平),Pulse(使用Camera Control Method选项中输出的Pulse信号作为相机的控制拍照信号 ),TDI Linescan Direction(用于TDI线扫相机的扫描方向控制)。文章来源地址https://www.toymoban.com/news/detail-489047.html
到了这里,关于线扫相机DALSA-Advanced Control(输出设置)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!