Part 01
大疆无人机空三建模干货分享(大疆智图集群建模超详细教程)
大疆智图集群简介
大疆在今年5月推出的智图3.0.0及以上版本中加入了集群功能,有集群版许可的用户可以使用此功能。智图集群是由一台主节点分配任务控制多台同局域网内子节点设备进行空三和建模。集群的工作效率由子节点数量,电脑硬件配置和局域网速等因素决定。
1.1推荐搭配集群配置
操作系统 Windows 7 及以上系统(64 位)
中央处理器 推荐 Intel Core i7/i9 和 AMD Ryzen 系列
显卡 推荐 1050Ti、1080Ti、2080Ti、3080Ti 系列
内存 至少32G,推荐64G
硬盘 推荐加装一个大容量的固态硬盘
网络 万兆有线网络环境
交换机 推荐使用万兆交换机
网络环境 推荐万兆有线网络环境,可大幅提升重建效率
1.2注意事项
①本地临时存储目录需具备高速读写能力,建议使用本地固态硬盘;
②共享文件存储目录和本地临时存储目录不可设置为同一个,且不同子节点的本地临时存储目录不可设置为同一个;
③建议使用 IP+路径格式作为文件目录路径。
Part 02
大疆智图集群版功能使用
以大疆智图3.0.4版为列,主节点、子节点具体设置如下:
主节点
1.集群功能入口
成功导入集群版许可证书后,软件右上角会显示集群重建功能入口,点击可进入集群重建设置;
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
2.集群重建设置
设置共享文件存储目录;

①共享文件储存目录:设置共享文件储存目录,建议设置在网络储存服务器(NAS)上,如何设置请参考【集群准备指导文档】;
②默认使用集群重建:勾选后,提交重建任务时,默认使用集群重建;
③默认使用单机重建:勾选后,提交重建任务时,默认使用单机重建;
④成果自动拷贝至主节点设备:
a.勾选后,重建成果将从网络储存服务器(NAS)拷贝至主节点设备上;(拷贝成果将会消耗一定时间,该时间体现在重建进度的 90%-100%左右);
b.取消勾选时,成果则只保存在网络储存服务器(NAS)。
查看集群重建设备列表

①主机名称:显示子节点设备的电脑名称;
②状态:空闲 / 忙碌,显示子节点当前状态,当处于“空闲”时可勾选作为工作节点;
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
③算法版本:子节点的算法版本号,必须与主节点算法版本保持一致才能勾选作为工作节点;
④操作:
a.工作节点:勾选后即选择该子节点作为工作节点;
b.重置:当子节点出现异常时,可重置该子节点使之为初始状态(重置后需点击搜索按钮重新搜索子节点
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
);
c.共享目录:检测子节点的共享目录与主节点的是否一致,蓝色为一致,红色为不一致;
⑤搜索按钮:可搜索当前局域网下所有开启的子节点;
勾选对集群重建任务管理;
⑥应子节点后,提交重建任务即可使用集群重建;
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
①提交重建任务后,在任务管理界面显示集群重建的任务队列、重建进度信息及局域网子节点设备列表;
②释放按钮:当子节点出现异常时,可点击释放按钮释放该节点(释放后需点击搜索按钮重新搜索子节点
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
)。
注意:释放后的子节点无法参与本次重建。
子节点
1.子节点是执行主节点所分配任务的主要算力,可在软件安装目录的【Assistant】→【map_gen】文件夹找到子节点应用程序JITerraEngine.exe;(软件正式发布时子节点应用程序存放路径与 Beta 测试的存放路径不同)。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
2.共享文件储存目录:设置共享文件储存目录,需与主节点共享文件目录保持一致;赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
子节点界面
3.本地临时储存目录:子节点在计算时的临时储存路径,请将该目录设置在本地电脑,并确保有足够的磁盘空间;
4.开启:开启子节点;
5.停止:停止子节点;
6.日志:子节点日志打印窗口;
7.语言切换:可切换不同语言;
8.开机自动启动:开启后,电脑开机时会自动开启子节点程序;
设置完共享目录以及本地临时储存目录后,点击【开启】按钮,在同一局域网下,主节点可搜索到该子节点;
9.注意:
①子节点的任务分配为自动选择内存最大的子节点进行空三任务;分块重建:在分块大于节点数的前提下,最大程度使用子节点;
②子节错误:单个子节点错误不会导致重建任务失败,失败的子节点任务会由主节点重新分配。如重新分配后的子节点也出现错误,将导致重建任务失败;
③子节点处于准备中:重建过程分为几个阶段,每个重建阶段需按顺序进行,部分阶段在主节点设备独立完成,此时所有子节点设备处于准备中;部分阶段则被拆分为多个任务分配给子节点处理,当部分子节点处理完该阶段被分配的任务后,状态处于准备中,待其他子节点处理完成后再进入下个重建阶段;
④集群日志:在主节点设备打开大疆智图,按Ctrl+Alt+L,在文件夹找到失败任务对应时间段的所有日志;在共享目录下,找到该任务对应的日志文件夹【slaves_log】的所有日志;该任务的缓存目录下,models(三维)或map(二维)文件夹内的SDK_log.txt。
Part 03
数据后处理流程
3.1预处理后数据情况
原始数据经过赛尔航测管家软件预处理后得到5个镜头的影像、POS文本数据和excel格式的BlockImport文件。
① 原始影像
原始影像为JPEG格式,经过赛尔航测管家软件预处理后影像的初始外方位元素(EO)内方位元素(IO)和对应相机的出厂畸变参数都已经写入到了影像的exif中,ContextCapture、大疆智图、photoscan等摄影测量软件可以通过加载这样影像从而读入对应的EO和相机畸变值。
② POS文本数据
POS文本中包含了影像名、EO等信息。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
③BlockImport文件
此文件记录了影像名、EO、IO和畸变参数、坐标系等信息,可在ContextCapture软件中直接导入生成一个新的block。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
3.2数据导入
①查看集群子节点状态,正常状态下是可使用等待任务中;
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
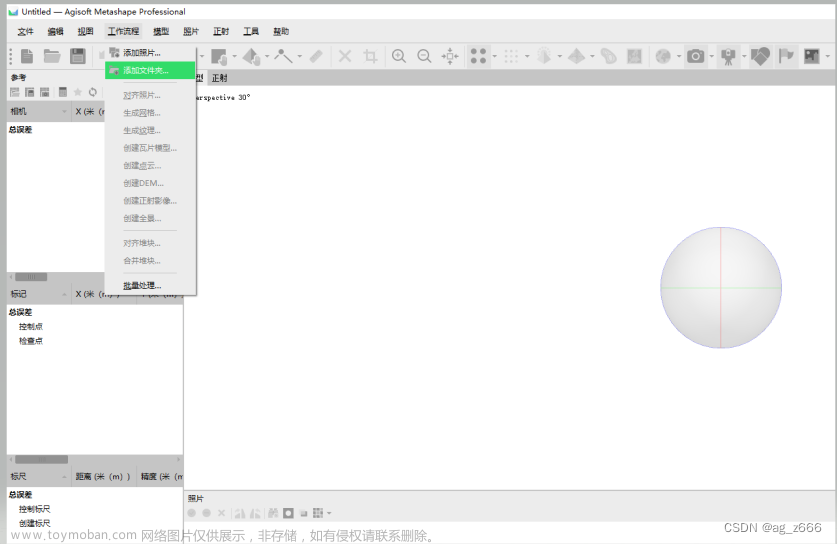
②将影像和POS等数据拷贝到共享目录下,新建任务<三维模型>;
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
添加影像文件夹导入影像,通过导入pos按键将txt或csv格式的pos数据导入软件。赛尔倾斜影像的EO和IO及畸变已经写入到了影像中,大疆智图读入影像的同时会直接读取这些参数无需单独导入pos。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
③检查POS数据的平面和高程精度;
大疆M300搭载的赛尔相机如果拍照瞬间飞机的RTK是固定解则此张照片POS的水平和垂直精度分别为0.03、0.06。此水平和垂直精度也可以通过导入POS进行自定义。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
在像控点管理界面查看测区影像的空间位置情况。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
④定义输出坐标系:此处定义的是数据成果的坐标系,可以选择已有坐标系中的一种也可以通过prj文件导入用户自定义的含有坐标转换参数(例如7参数)的坐标系,在
https://spatialreference.org 网站查询并下载需要的坐标系.prj 文件,然后在大疆智图中点击“导入PRJ”按键将其导入。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
3.3空三处理
①无控空三
单击空三按钮,进行无控空三。空三后查看空三报告检查是否绝大多数影像成功参与了空三计算。
② 有控空三
设置好像控点坐标系导入像控点。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
像控点刺点
像控点刺点时要根据实际情况设置像控点的平面和高程精度,设置是作为检查点还是控制点,平面点、高程点还是平高点。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
像控点刺点的时候要选择控制点位于影像中间位置的影像来刺点。一般情况一个点刺个15张左右的影像就可以了,尽量确保5个镜头的影像上都有刺点。
如果刺点时预测的点位和实际的点位偏差较大,那么先刺3个控制点,然后单击优化按键经过优化计算后剩余未刺的点的预测位置就会和实际位置非常接近而易于刺点了。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
3.4疑难问题处理
空三分层及大量影像未成功参与空三计算的问题通常通过如下几种方法来解决:
①检查pos与照片对应关系是否正确;
检查转弯处的pos数据的旋偏角变化和对应影像上的地物变化是否一致,如果不一致则将pos与影像进行正确关联后再进行空三。
②自检校重新计算相机畸变参数;
选取测区的一小块区域先做个无控空三然后再通过赛尔航测管家将计算出的新畸变参数写入到原始照片中重新导入智图软件进行空三。
③添加连接点;
空三后如果出现分层、交叉或大范围影像未参与空三的情况,也可以尝试在这些区域添加一些连接点再空三来解决这些问题。
大疆智图空三能力比较强,较少会出现空三分层及空三失败的情况。
大疆智图空三结果导出;
大疆智图空三完成后进行重建时勾选上生成xml文件,则在工程目录的… modelspc目录下会生成一个
BlocksExchangeUndistortAT.xml文件,同时在… modelspc.tempundistort下会生成消除畸变后的影像,注意
BlocksExchangeUndistortAT.xml文件中的影像是关联的消除畸变后的影像,智图导出的空三成果没有包含接点所以在导入其它软件后需要再做一遍空三才能进行建模。
3.4 确定建模范围
①空三完成后在兴趣区域建模中导入KML文件或手动画出建模区域;
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
②建图场景一般为默认,也可以根据测区情况而定;
③兴趣建模需在空三完成后可手动划区域也可导入KML文件和经纬高划分建模区域;
④输出坐标系可选择已有坐标系和用户自定义的PRJ文件;
3.5 三维建模
①选择成果及其格式:
空三成果选择生成XML文件;
点云多选用LAS格式;
模型较多使用OSGB,OBJ等格式;
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
②查看子节点建模状态
点击重建任务管理按钮后查看集群设备列表,状态为“准备中”则表明子节点马上要开始建模,当子节点状态为“工作中”时表面子节点正在建模中。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
Part 04
智图集群数据生产案例
案列1
该数据由大疆M300飞机搭载赛尔102S相机航摄获得。测区建筑物丰富,模型效果较好,集群版使得内业效率明显提高。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
模型效果局部截图
案列2
测区环境平整,以居民楼铁皮房为多,建模效果整体比较清晰。处理时间接近15小时比单机处理节约好几天的时间。
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
空三效果图赛尔学院|空三建模干货分享,你们要的大疆智图集群来啦
成果截图文章来源:https://www.toymoban.com/news/detail-489471.html
以上为本期赛尔学院知识分享的全部内容,空三和建模是一个非常考究细节的作业过程;对于本期内容涉及到的知识点,需要各位可以应用到实际案例中操作一遍,以最大化程度熟悉和掌握操作流程。文章来源地址https://www.toymoban.com/news/detail-489471.html
到了这里,关于大疆无人机空三建模干货分享(大疆智图集群建模超详细教程)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!