5图像复原与重建
5.1图像退化/复原过程的模型
退化图像: g ( x , y ) = h ( x , y ) ★ f ( x , y ) + η ( x , y ) g(x,y)=h(x,y)\bigstar f(x,y)+\eta(x,y) g(x,y)=h(x,y)★f(x,y)+η(x,y) 写成等价的频率域表示: G ( u , v ) = H ( u , v ) F ( u , v ) + N ( u , v ) G(u,v)=H(u,v)F(u,v)+N(u,v) G(u,v)=H(u,v)F(u,v)+N(u,v)
5.2噪声模型
5.2.1噪声的空间和频率特性
频率特性是指傅里叶域中噪声的频率内容
5.2.2一些重要的噪声概率密度函数
常见密度函数:
- 高斯 p ( z ) = 1 2 π σ e − ( z − z ‾ ) 2 / 2 σ 2 p(z)=\frac{1}{\sqrt{2\pi}\sigma}\mathrm{e}^{-(z-\overline{z})^2/2\sigma^2} p(z)=2πσ1e−(z−z)2/2σ2
- 瑞利 p ( z ) = { 2 b ( z − a ) e − ( z − a ) 2 / b , z ≥ a 0 , z < a z ‾ = a + π b / 4 , σ 2 = b ( 4 − π ) 4 \begin{gathered} p(z)=\left\{\begin{array}{l l}{{\frac{2}{b}(z-a)e^{-(z-a)^{2}/b},}}&{{\quad z\geq a}}\\ {{0,}}&{{\quad z<a}}\end{array}\right. \\ \overline{z}=a+\sqrt{\pi b/4} , \sigma^{2}={\frac{b(4-\pi)}{4}} \end{gathered} p(z)={b2(z−a)e−(z−a)2/b,0,z≥az<az=a+πb/4,σ2=4b(4−π)
- 伽马 p ( z ) = { a b z b − 1 ( b − 1 ) ! e − a z , z ≥ a 0 , z < a z ‾ = b a , σ 2 = = b a 2 \begin{aligned} p(z)={\left\{\begin{matrix}{\frac{a^{b}z^{b-1}}{(b-1)!}\mathrm{e}^{-a z},\quad}&{{z\geq a}}\\ {0,\quad}&{z<a}\end{matrix}\right.} \\ {\overline{{z}}}={\frac{b}{a}} , {\boldsymbol{\sigma}}^{2}= ={\frac{b}{a^{2}}} \end{aligned} p(z)={(b−1)!abzb−1e−az,0,z≥az<az=ab,σ2==a2b
- 指数 p ( z ) = { a e − a z , z ≥ 0 0 , z < 0 z ‾ = 1 a , σ 2 = 1 a 2 \begin{aligned} p(z)={\left\{\begin{array}{l l}{a e^{-a z},}&{z{\geq}0}\\ {0,}&{z<0}\end{array}\right.} \\ {\overline{{z}}}={\frac{1}{a}} , \sigma^{2} ={\frac{1}{a^{2}}} \end{aligned} p(z)={ae−az,0,z≥0z<0z=a1,σ2=a21
- 均匀 p ( z ) = { 1 b − a , a ≤ z ≤ i 0 , else z ‾ = a + b 2 , σ 2 = ( b − a ) 2 12 \begin{aligned} p(z)=\left\{\begin{array}{l l}{{\frac{1}{b-a}}, a\leq z\leq i}\\ {0,}{\quad \text{else}}\end{array}\right. \\ \overline{z}=\frac{a+b}{2} , \sigma^{2}= \frac{(b-a)^{2}}{12} \end{aligned} p(z)={b−a1,a≤z≤i0,elsez=2a+b,σ2=12(b−a)2
- 脉冲 p ( z ) = { P a , z = a P b , z = b 1 − P a − P b , else p(z)=\begin{cases}P_a,\quad&z=a\\ P_b,\quad&z=b\\ 1-P_a-P_b,\quad&\text{else}\end{cases} p(z)=⎩ ⎨ ⎧Pa,Pb,1−Pa−Pb,z=az=belse
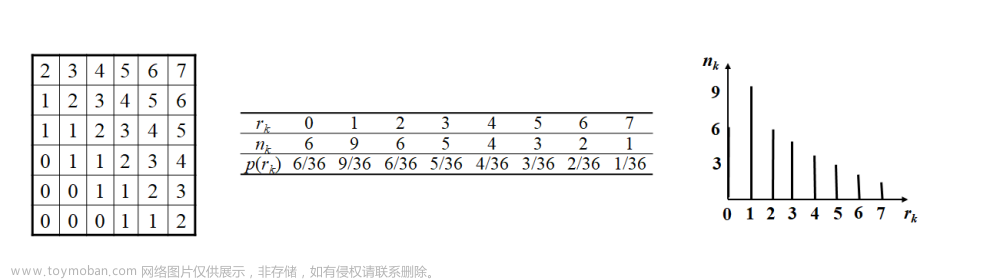
5.2.4噪声估计
均值和方差如下 z ‾ = ∑ i = 0 L − 1 z i p S ( z i ) σ 2 = ∑ i = 0 L − 1 ( z i − z → ) 2 p S ( z i ) \begin{gathered} {\overline{{z}}}=\sum_{i=0}^{L-1}z_{i}p_{S}(z_{i}) \\ \sigma^{2}=\sum_{i=0}^{L-1}(z_{i}-\overrightarrow{z})^{2}p_{S}(z_{i}) \end{gathered} z=i=0∑L−1zipS(zi)σ2=i=0∑L−1(zi−z)2pS(zi) 可以使用均值和方差计算出参数,确定噪声函数。
5.3只存在噪声的复原——空间滤波
退化函数为: g ( x , y ) = f ( x , y ) + η ( x , y ) G ( u , v ) = F ( u , v ) + N ( u , v ) \begin{aligned} &g\left(x,y\right) =f\left(x,y\right)+\eta\left(x,y\right) \\ &G\left(u,v\right) =F(u,v)+N(u,v) \end{aligned} g(x,y)=f(x,y)+η(x,y)G(u,v)=F(u,v)+N(u,v)
5.3.1均值滤波器
算术均值滤波器:
f
^
(
x
,
y
)
=
1
m
n
∑
(
s
,
t
)
∈
S
x
y
g
(
s
,
t
)
\hat{f}(x,y)=\frac{1}{mn}\sum_{(s,t)\in S_{xy}}g(s,t)\\
f^(x,y)=mn1(s,t)∈Sxy∑g(s,t)
几何均值滤波器:
f
^
(
x
,
y
)
=
[
∏
(
s
,
t
)
∈
S
x
y
g
(
s
,
t
)
]
1
m
n
\hat{f}(x,y)=\left[\prod\limits_{(s,t)\in S_{xy}}g(s,t)\right]^{\frac{1}{mn}}
f^(x,y)=
(s,t)∈Sxy∏g(s,t)
mn1 谐波均值滤波器:
f
^
(
x
,
y
)
=
m
n
∑
(
s
,
t
)
∈
S
n
1
g
(
s
,
t
)
\hat{f}(x,y)=\frac{mn}{\displaystyle\sum_{(s,t)\in S_n}\frac{1}{g(s,t)}}
f^(x,y)=(s,t)∈Sn∑g(s,t)1mn 逆谐波均值滤波器:
f
^
(
x
,
y
)
=
∑
(
s
,
t
)
∈
S
x
y
g
(
s
,
t
)
Q
+
1
∑
(
s
,
t
)
∈
S
x
y
g
(
s
,
t
)
Q
\hat{f}(x,y)=\frac{\displaystyle\sum_{(s,t)\in S_{xy}}g(s,t)^{Q+1}}{\displaystyle\sum_{(s,t)\in S_{xy}}g(s,t)^{Q}}
f^(x,y)=(s,t)∈Sxy∑g(s,t)Q(s,t)∈Sxy∑g(s,t)Q+1
5.3.2统计排序滤波器
中值滤波器:
f
^
(
x
,
y
)
=
median
(
s
,
t
)
∈
S
x
y
{
g
(
s
,
t
)
}
\hat{f}(x,y)=\underset{(s,t)\in S_{xy}}{\text{median}}\left\{g(s,t)\right\}
f^(x,y)=(s,t)∈Sxymedian{g(s,t)}
最大值和最小值滤波器:
f
^
(
x
,
y
)
=
max
(
s
,
t
)
∈
S
x
y
{
g
(
s
,
t
)
}
f
^
(
x
,
y
)
=
min
(
s
,
t
)
∈
S
x
y
{
g
(
s
,
t
)
}
\hat{f}(x,y)=\max\limits_{(s,t)\in S_{xy}}\left\{g(s,t)\right\}\\\hat{f}(x,y)=\min\limits_{(s,t)\in S_{xy}}\left\{g(s,t)\right\}
f^(x,y)=(s,t)∈Sxymax{g(s,t)}f^(x,y)=(s,t)∈Sxymin{g(s,t)}
中点滤波器:
f
^
(
x
,
y
)
=
1
2
[
max
(
s
,
t
)
∈
S
x
y
{
g
(
s
,
t
)
}
+
min
(
s
,
t
)
∈
S
x
y
{
g
(
s
,
t
)
}
]
\hat{f}(x,y)=\frac{1}{2}\bigg[\max\limits_{(s,t)\in S_{xy}}\big\{g(s,t)\big\}+\min\limits_{(s,t)\in S_{xy}}\big\{g(s,t)\big\}\bigg]
f^(x,y)=21[(s,t)∈Sxymax{g(s,t)}+(s,t)∈Sxymin{g(s,t)}]
修正的阿尔法均值滤波器:
f
^
(
x
,
y
)
=
1
m
n
−
d
∑
(
s
,
t
)
∈
S
π
g
r
(
s
,
t
)
\hat{f}(x,y)=\frac{1}{mn-d}\sum_{(s,t)\in S_\pi}g_r(s,t)
f^(x,y)=mn−d1(s,t)∈Sπ∑gr(s,t)
5.3.3自适应滤波器
自适应表达式可写为 f ^ ( x , y ) = g ( x , y ) − σ η 2 σ L 2 [ g ( x , y ) − m L ] \hat{f}(x,y)=g(x,y)-\frac{\sigma_\eta^2}{\sigma_L^2}\big[g(x,y)-m_L\big] f^(x,y)=g(x,y)−σL2ση2[g(x,y)−mL]
5.4用频率域滤波消除周期噪声
使用带阻滤波器、带通滤波器和陷波滤波器消除周期噪声
5.6估计退化函数
方法:
- 观察法
- 试验法
- 数学建模法
5.6.1图像观察估计
\quad
假设给我们一幅退化图像,而没有关于退化函数
H
H
H的任何知识。基于图像被线性、位置不变的过程退化的假设,估计
H
H
H的一种方法就是从图像本身来收集信息。例如,如果图像已被模糊,则我们可以观察图像中包含样本结构的一个小矩形区域,如某—物体和背景的一部分。为了降低噪声的影响,我们可以寻找一个有很强信号内容的区域(如高对比度区域)。下一步是处理子图像以便得到尽可能不模糊的结果。例如,我们可以使用锐化滤波器对这个子图像进行锐化处理,甚至可以使用手工方法处理小区域。
\quad
令
g
s
(
x
,
y
)
g_s(x, y)
gs(x,y)表示要观察的子图像,令
f
s
(
x
,
y
)
f_s(x,y)
fs(x,y)表示处理过的子图像(现实中,该图像是原图像在该区域的估计图像)。然后,假设噪声的影响由于选择了一个强信号区域而可以忽略,可得
H
s
(
u
,
v
)
=
G
s
(
u
,
v
)
F
^
(
u
,
v
)
H_{s}(u,v)=\frac{G_{s}(u,v)}{\hat{F}(u,v)}
Hs(u,v)=F^(u,v)Gs(u,v)
根据这一函数特性,然后,我们可基于位置不变的假设还原完整的退化函数
H
(
u
,
v
)
H(u, v)
H(u,v)。例如,假设
H
(
u
,
v
)
H(u, v)
H(u,v)的径向曲线具有高斯曲线的近似形状。我们可以利用这一信息在更大比例上构建一个有基本相同形状的函数
H
(
u
,
v
)
H(u,v)
H(u,v)。然后,在下面几节讨论的一种复原方法中使用
H
(
u
,
v
)
H(u,v)
H(u,v)。很清楚,这是仅在特殊环境下使用的很麻烦的处理,例如复原一幅有历史价值的老照片。
5.6.2试验估计
\quad
如果可以使用与获取退化图像的设备相似的装置,从理论上讲,得到一个准确的退化估计是可能的。与退化图像类似的图像可以通过各种系统设置得到,直到这些图像退化到尽可能接近我们希望复原的程度。之后,概念是使用相同的系统对一个冲激(小亮点)成像,得到退化的冲激响应。线性空间不变系统完全由其冲激响应来表征。
一个冲激可由一个亮点来模拟,该点应尽可能亮,以便将噪声的影响降低到可以忽略的程度。回顾一下,由于冲激的傅里叶变换是一个常量、可得下式:
H
(
u
,
v
)
=
G
(
u
,
v
)
A
H\left(u,v\right) ={\frac{G(u,v)}{A}}
H(u,v)=AG(u,v)
5.6.3建模估计
该模型的通用形式为 H ( u , v ) = e − k ( u 2 + v 2 ) 5 / 6 H(u,v)=e^{-k(u^{2}+v^{2})^{5/6}} H(u,v)=e−k(u2+v2)5/6
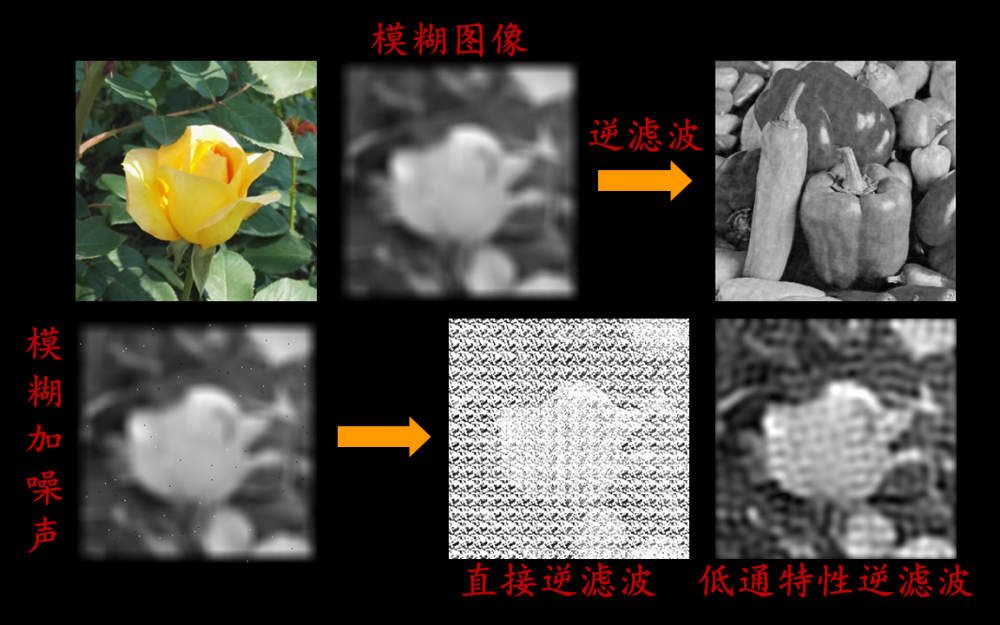
5.7逆滤波
用退化函数除退化图像的傅里叶变换G来计算初始图像傅里叶变换的估计 F ^ ( u , v ) \hat{F}(u,v) F^(u,v),即 F ^ ( u , v ) = G ( u , v ) H ( u , v ) = F ( u , v ) + N ( u , v ) H ( u , v ) \hat{F}(u,v)=\frac{G(u,v)}{H(u,v)} = F(u,v)+ \frac{N(u,v)} {H(u,v)} F^(u,v)=H(u,v)G(u,v)=F(u,v)+H(u,v)N(u,v)
5.8最小均方误差(维纳)滤波
在这一节,我讨论了一种综合了退化函数和噪声统计特征进行复原处理的方法。该方法建立在图像和噪声都是随机变量的基础上,目标是找到未污染图像f的一个估计,使它们之间的均方误差最小。这种误差度量由下式给出: e 2 = E { ( f − f ^ ) 2 } e^2=E\left\{(f-\hat{f})^2\right\} e2=E{(f−f^)2}
上式中误差函数的最小值在频率域中由下式给出: F ^ ( u , v ) = [ H ∗ ( u , v ) S f ( u , v ) S f ( u , v ) ∣ H ( u , v ) ∣ 2 + S η ( u , v ) ] G ( u , v ) = [ H ∗ ( u , v ) ∣ H ( u , v ) ∣ 2 + S η ( u , v ) / S f ( u , v ) ] G ( u , v ) = [ 1 H ( u , v ) ∣ H ( u , v ) ∣ 2 ∣ H ( u , v ) ∣ 2 + S η ( u , v ) / S f ( u , v ) ] G ( u , v ) \begin{aligned} \widehat{F}_{\left(u,v\right)}& =\left[{\frac{H^{*}(u,v)S_{f}(u,v)}{S_{f}(u,v)\left|H(u,v)\right|^{2}+S_{\eta}(u,v)}}\right]G(u,v)=\left[{\frac{H^{*}(u,v)}{\left|H(u,v)\right|^{2}+S_{\eta}(u,v)/S_{f}(u,v)}}\right]G(u,v) \\ &=\Bigg[\frac{1}{H(u,v)}\frac{\left|H(u,v)\right|^{2}}{\left|H(u,v)\right|^{2}+S_{\eta}(u,v)/S_{f}(u,v)}\Bigg]G(u,v) \end{aligned} F (u,v)=[Sf(u,v)∣H(u,v)∣2+Sη(u,v)H∗(u,v)Sf(u,v)]G(u,v)=[∣H(u,v)∣2+Sη(u,v)/Sf(u,v)H∗(u,v)]G(u,v)=[H(u,v)1∣H(u,v)∣2+Sη(u,v)/Sf(u,v)∣H(u,v)∣2]G(u,v)
信噪比用下式来近似: SNR = ∑ a = 0 M − 1 ∑ v = 0 N − 1 ∣ F ( u , v ) ∣ 2 ∑ a = 0 M − 1 ∑ v = 0 N − 1 ∣ N ( u , v ) ∣ 2 \text{SNR}=\frac{\displaystyle \sum_{a=0}^{M-1}\sum_{v=0}^{N-1}\left|F(u,v)\right|^2}{\displaystyle \sum_{a=0}^{M-1}\sum_{v=0}^{N-1}\left|N(u,v)\right|^2} SNR=a=0∑M−1v=0∑N−1∣N(u,v)∣2a=0∑M−1v=0∑N−1∣F(u,v)∣2
5.10几何均值滤波
几何均值滤波形式 F ^ ( u , v ) = [ H ∗ ( u , v ) ∣ H ( u , v ) ∣ 2 ] α [ H ∗ ( u , v ) ∣ H ( u , v ) ∣ 2 + β [ S η ( u , v ) S f ( u , v ) ] ] 1 − α G ( u , v ) \hat{F}(u,v)=\left[\frac{H^*(u,v)}{\left|H(u,v)\right|^2}\right]^\alpha\left[\frac{H^*(u,v)}{\left|H(u,v)\right|^2+\beta\left[\frac{S_\eta(u,v)}{S_f(u,v)}\right]}\right]^{1-\alpha}G(u,v) F^(u,v)=[∣H(u,v)∣2H∗(u,v)]α ∣H(u,v)∣2+β[Sf(u,v)Sη(u,v)]H∗(u,v) 1−αG(u,v)文章来源:https://www.toymoban.com/news/detail-490027.html
当 α = 1 \alpha=1 α=1时,该滤波器退化为逆滤波器;当 α = 0 \alpha=0 α=0时,该滤波器变为所谓的参数维纳滤波器,参数维纳滤波器在 β = 1 \beta=1 β=1时还原为标准的维纳滤波器。如果 α = 1 / 2 \alpha=1/2 α=1/2,则滤波器变成相同幂次的两个量的积,这是几何均值的定义,这样就给出了这种滤波器的命名。当 β = 1 \beta=1 β=1时,随着 α \alpha α减小到1/2 以下,滤波器的性能越来越接近逆滤波器。类似地,当 α \alpha α增大到1/2以上时,滤波器更接近维纳滤波器。当 α = 1 / 2 \alpha=1/2 α=1/2且 β = 1 \beta=1 β=1时,该滤波器通常也称为谱均衡滤波器。上式在实现复原滤波时非常有用,因为它表示了合并为单个表达式的滤波器族。文章来源地址https://www.toymoban.com/news/detail-490027.html
到了这里,关于第五章 图像复原与重建的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!