目录
一. 什么是布隆过滤器
二. 布隆过滤器的实现
2.1 数据插入函数set
2.2 判断数据是否存在函数test
2.3 布隆过滤器数据的删除
三. 哈希切分
一. 什么是布隆过滤器
在我之前的博客C++:使用位图处理海量数据_【Shine】光芒的博客-CSDN博客中,介绍了如何使用位图来处理海量数据,位图的特点为:
- 速度快,节省空间。
- 采用直接定值法,不存在哈希冲突。
- 只适用于整形数据。
为了解决位图只适用于整形数据的问题,布隆过滤器被提了出来,是哈希表和位图结合的一种数据结构,主要用于处理海量字符串数据。
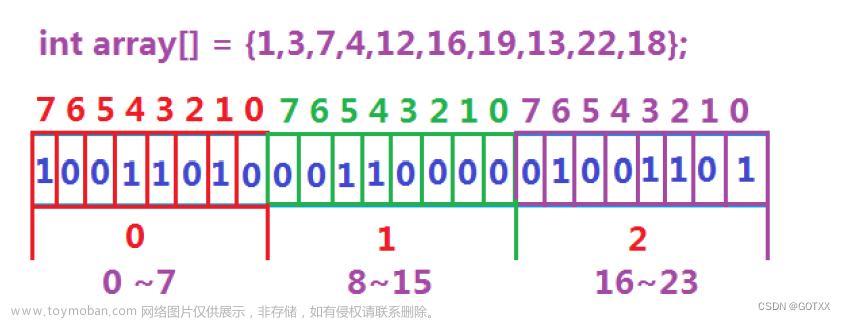
布隆过滤器的设计思想为:给定一个关键值Key,通过哈希函数,将其转换为size_t类型的数据,记为hashi,这里的hashi对应一个比特位,如果Key存在,它对应的二进制位就是1。我们可以认为,布隆过滤器的底层也是通过位图来实现的,是对位图的封装。
布隆过滤器和位图的不同在于:位图直接使用整形数据映射比特位,属于直接定值法,而布隆过滤器要对整形数据进行进一步转换(一般使用除留余数法)后映射到对应二进制位。

但是,如果只给定一个哈希函数,就很容易存在哈希冲突,从而导致误判:
- 如果判定为存在,那么有可能是误判,因为即使给定的key值不在,它也可能与某个存在的关键值冲突。
- 如果判定为不存在,则不可能是误判。
布隆过滤器的误判不可能完全避免,但是可以采取一定的优化措施,来降低误判率。
- 让一个值映射多个比特位可以降低误判概率,从理论上讲,一个值映射的比特位越多,误判概率越低,但是消耗的空间也越大。

布隆过滤器具有很强的实际应用价值,其在实际应用中分为允许误判和不允许误判两种情况:
- 不允许误判:如黑名单通缉系统,所有的黑名单人员信息都被存储在远端数据库,而前端存储了数据库的布隆过滤器信息。当前端接收到一个人的信息要判断它是否在黑名单时,先走前端的布隆过滤器,如果布隆过滤器返回的结果为不在,那么不可能误判,直接返回。如果布隆过滤器的结果为在,那么就需要通过网络连接远端数据库,在数据库中匹配信息,判断是否是误判。
- 允许误判:注册账号时,判断用户自定义的用户名是否和已有用户名冲突,如果冲突要求用户重新定义用户名。这里允许误判,所有直接走近端的布隆过滤器即可,无需再通过远端的数据库确认是否误判。

二. 布隆过滤器的实现
假设布隆过滤器共设置了3个哈希函数,分别记为Hash1、Hash2、Hash3,即:1个key值对应3个比特位。 布隆过滤器类有一个成员变量_bst,自定义类型位图,N为待插入数据的个数。
代码2.1:布隆过滤器声明
//布隆过滤器(一般用于字符串)
//Hash1/2/3的默认值为三个字符串哈希函数,这是为了降低误判概率
template<size_t N, class K = std::string, class Hash1 = BKDRHash, class Hash2 = APHash, class Hash3 = DJBHash>
class BloomFilter
{
public:
void set(const K& key); //数据插入函数
bool test(const K& key); //数据查找函数
private:
static const size_t ratio = 5; //比例因子
zhang::bitset<N * ratio> _bst; //位图
};2.1 数据插入函数set
获取到要插入的key数据(一般为string)后,通过三个哈希函数将key转换为3个不同的整形数据,将三个整形位置对应的比特位都置为1即可。

代码2.2:set函数
//一个关键值key对应三个不同的哈希函数,有三个不同的位置
//set函数将三个对应的bit位全部置1
void set(const K& key)
{
size_t hash1 = Hash1()(key) % (N * ratio);
size_t hash2 = Hash2()(key) % (N * ratio);
size_t hash3 = Hash3()(key) % (N * ratio);
_bst.set(hash1);
_bst.set(hash2);
_bst.set(hash3);
}2.2 判断数据是否存在函数test
检查key值对应的n个bit位是否全部为1,如果有一个是0,则表明key不存在。注意,如果判定为存在,那么可能是由于哈希冲突造成的,可能是误判。
代码2.3:test函数
bool test(const K& key)
{
size_t hash1 = Hash1()(key) % (N * ratio);
if (!_bst.test(hash1))
return false;
size_t hash2 = Hash2()(key) % (N * ratio);
if (!_bst.test(hash2))
return false;
size_t hash3 = Hash3()(key) % (N * ratio);
if (!_bst.test(hash3))
return false;
//三个哈希函数映射的二进制位都是1,表示存在
return true;
}2.3 布隆过滤器数据的删除
一般而言,布隆过滤器是不支持数据删除的,但是,也并非不可以实现。如果采用一般形式的一个key对应多个比特位的布隆过滤器,那么直接在删除key时将它对应的比特位置0,那会影响到其它的值,让其它存在的值被误判为不存在,这是布隆过滤器所不允许的。

我们可以通过将每个bit位扩展为一个小计数器,来解决数据删除问题。这样原本一个Hash(key)计算值由映射到一张位图中的一个bit位,变为映射到多种位图中的多个bit位。假设布隆过滤器中有两张位图,两个位图特定位置中的两个bit为表示这个位置被映射到的次数。11表示3次,10表示2次,01表示一次。删除数据时,计数器的值-1即可。
但是,布隆过滤器如果支持删除,必然会引起空间消耗量的上升,却依旧无法完全避免误删除问题,布隆过滤器最大的优势之一就是空间消耗少,如果支持删除这一优势就会大打折扣,因此一般不需要布隆过滤器支持数据删除。

三. 哈希切分
本文从两个海量数据处理问题入手,讲述哈希切分。
问题1:给定两个含有100亿个query(字符串)的文件,如何精确查找两个文件的交集?
我们假设一个query占用20bytes的空间,那么100亿个query就占用2000亿bytes的空间,也就是200G,显然,内存无法容纳这么多数据。
处理大文件的一种常用方法是将大文件均分为N个小文件,我们假设将问题中的一个文件均分为1000个小文件,将一个大文件切分出来的每个小文件,与另一个文件中的每个小文件进行比较,查找交集,这样确实可以找出两个大文件的交集,但效率十分低下。
为了高效查找大文件交集,我们采用哈希切分的方法。假设两个大文件分别叫做A和B,并将每个大文件切分为1000个小文件,从0~999对每个小文件进行编号,读取A和B文件中的每个query,根据i=Hash(query)%1000,将query放入对应编号的小文件中。这样可以保证相同的query被放入相同编号的小文件中,最终只需要比较大文件A和B编号相同的小文件找交集即可。
查找交集的方法:将两个小文件中的query放入到两个set中去,从begin()位置开始遍历两个set,如遇到相同值,就是小文件交集。这样还可以实现去重功能。

问题2:给定一个超过100G的日志文件,里面存储了若干IP地址,如何找出出现次数最多的K个IP地址(topK问题)文章来源:https://www.toymoban.com/news/detail-490064.html
这里也要采用哈希切割的思想解决问题。将Log大文件切分为N个小文件,编号从0~N,根据i=Hash(IP)%N,计算每个IP应该放入到哪个小文件中,这样可以保证相同的IP在相同的小文件中。完成切分后,使用map<string, int>对每个小文件中的每个IP出现的次数进行统计,然后使用小堆结构,统计出现次数最多的K个IP。文章来源地址https://www.toymoban.com/news/detail-490064.html

到了这里,关于C++:布隆过滤器和哈希切分的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!








![[C++]哈希应用之位图&布隆过滤器](https://imgs.yssmx.com/Uploads/2024/04/852662-1.gif)