❤️ 专栏简介:本专栏记录了从零学习单片机的过程,其中包括51单片机和STM32单片机两部分;建议先学习51单片机,其是STM32等高级单片机的基础;这样再学习STM32时才能融会贯通。
☀️ 专栏适用人群 :适用于想要从零基础开始学习入门单片机,且有一定C语言基础的的童鞋。
🌙专栏目标:实现从零基础入门51单片机和STM32单片机,力求在玩好单片机的同时,能够了解一些计算机的基本概念,了解电路及其元器件的基本理论等。⭐️ 专栏主要内容: 主要学习STM32单片机的功能、各个模块、单片机的外设、驱动等,最终玩好单片机和单片机的外设,全程手敲代码,实现我们所要实现的功能。
🌴 专栏说明 :如果文章知识点有错误的地方,欢迎大家随时在文章下面评论,我会第一时间改正。让我们一起学习,一起进步。
💑专栏主页:http://t.csdn.cn/HCD8v
本学习过程参考:https://space.bilibili.com/383400717
STM3单片机安装软件、各种资料以及源码的路径:
链接:https://pan.baidu.com/s/1snD0uuTfMhchFqOMWvAiHA?pwd=asdf#list/path=%2F
提取码:asdf
链接里压缩包的解压密码:32
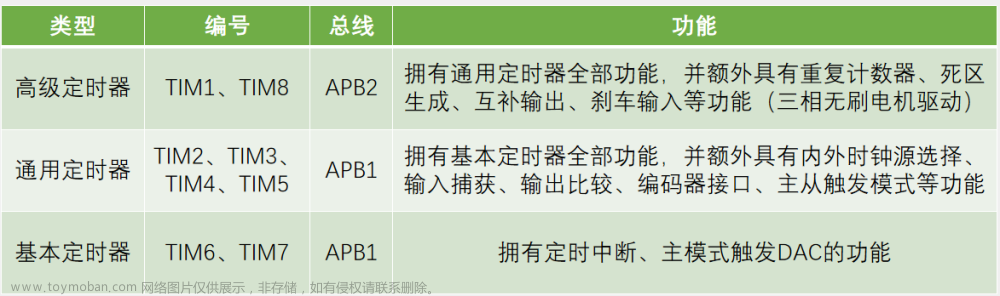
本大节主要学习TIM定时器的相关知识,包含八小节:
第一小节主要学习定时器基本定时的功能,第二小节是对第一小节的内容写两个程序进行练习,分别是定时器定时中断和定时器外部时钟;
第三小节主要学习定时器输出比较的功能,第四小节是对第三小节的内容写三个程序进行练习,分别是PWM驱动LED呼吸灯、PWM驱动舵机以及PWM驱动直流电机;
第五小节主要学习定时器输入捕获的功能,第六小节是对第五小节的内容写两个程序进行练习,分别是输入捕获模式测频率和PWMI模式测频率占空比;
第七小节主要学习定时器的编码器接口功能,第八小节是对第七小节的内容写一个程序进行练习,即编码器接口测速;
最终附上所有的源代码;
本小节主要是学习定时器输出比较的功能;输出比较这个模块最常见的用途就是产生PWM波形,PWM波形又是驱动电机的必要条件,所以常用于驱动电机等设备;在此小节我们将会学习到使用STM32输出PWM波形,来驱动舵机和直流电机;
一、输出比价和PWM简介
1.1 输出比较简介
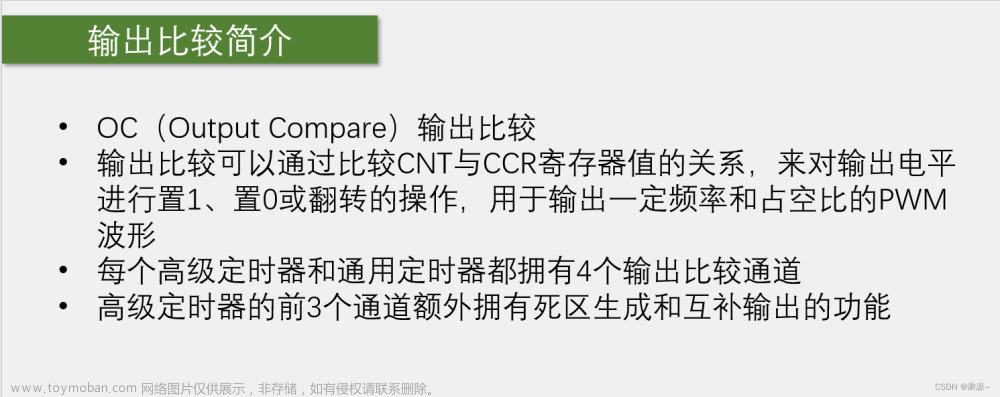
- OC(Output Comepare)输出比较;IC(Input Capture)输入捕获;CC(Capture/Compare)输入捕获和输出比较的单元;
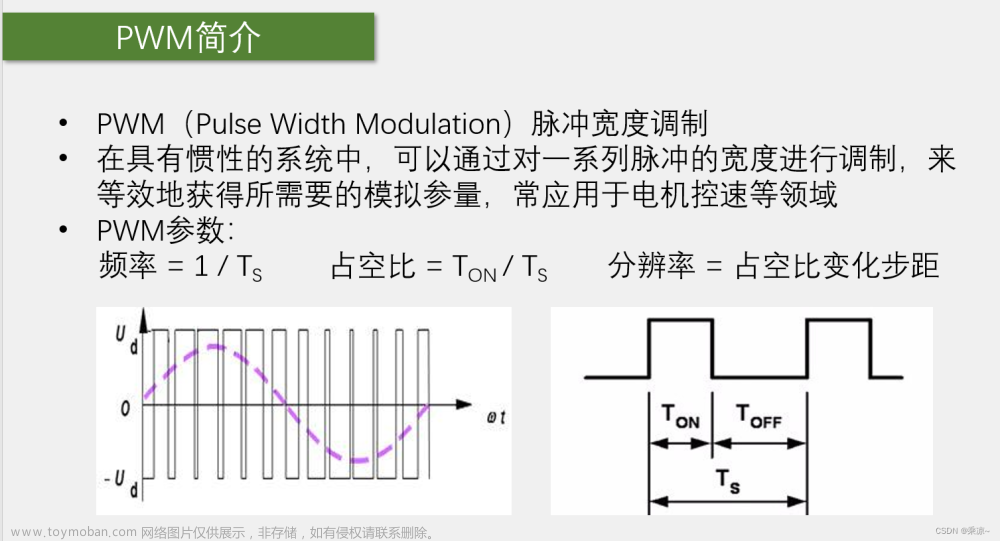
1.2 PWM简介
-
PWM波形是一个数字输出信号,也是由高低电平组成的;
-
解释一下PWM应用于控制LED灯亮度(也就是目标一的内容):
按理说LED灯只能有完全亮和完全灭两种状态,怎么能实现控制亮度大小呢?通过PWM波形就可以实现。我们可以让LED不断点亮、熄灭、点亮、熄灭;当这个点灯、熄灭的频率足够大时,LED就不会闪烁了,而是呈现出一个中等亮度;当我们调控这个点亮和熄灭时间比例时,就能让LED呈现出不同的亮度级别了; -
对于电机调速也是一样的道理,我们以一个很快的频率,给电机通电、断电、通电、断电,那么电机的速度就能维持在一个中等速度,这就是PWM的基本思想;
-
PWM参数的公式,要熟记
-
占空比等于高电平的时间比上低电平的时间;T_ON是高电平的时间,T_OFF是低电平的时间,T_S是一个周期的时间;所以
占空比的含义就是高电平的时间相对于整个周期时间的比例;
比如占空比位50%,那就是高低电平时间相等的方波;波形如下图:
占空比为20%,那就是高电平占20%,低电平占80%,波形如下图
占空比为100%,那就是全程都是高电平;
- 占空比决定了PWM等效出来的模拟电压的大小; 占空比越大,那等效出来的模拟电压就越趋近于高电平;占空比越小,那等效出来的模拟电压就越趋近于低电平;
- 分辨率就是占空比变化的细腻程度
二、输出比较基础知识
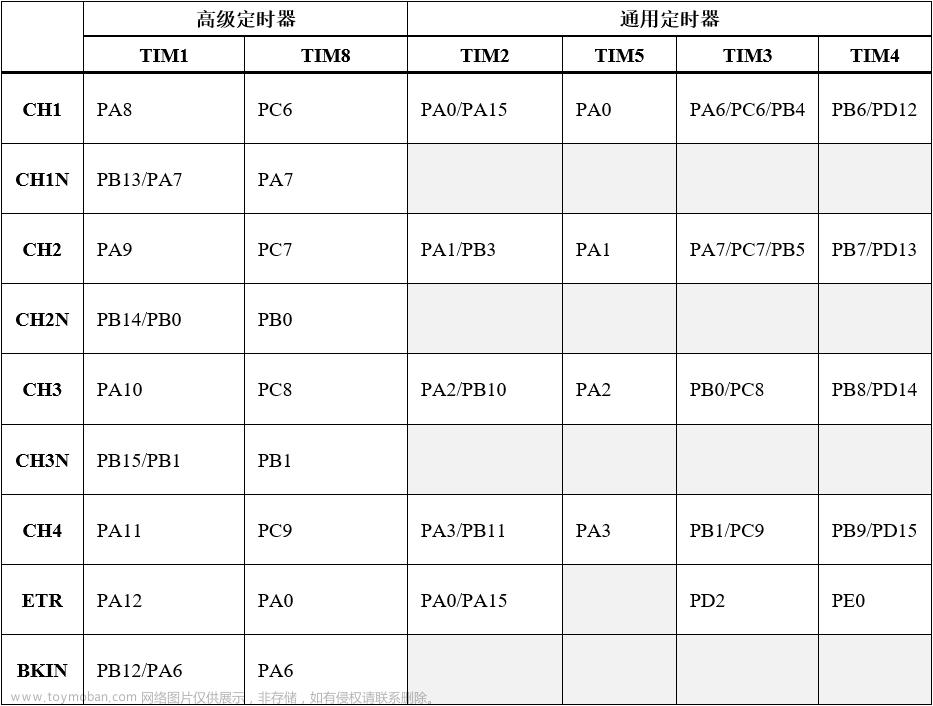
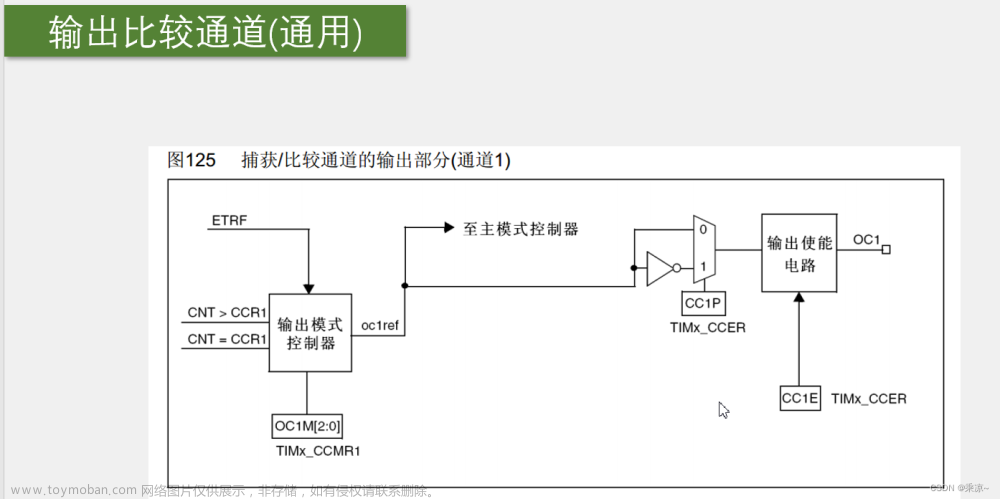
2.1 输出比较通道(通用)
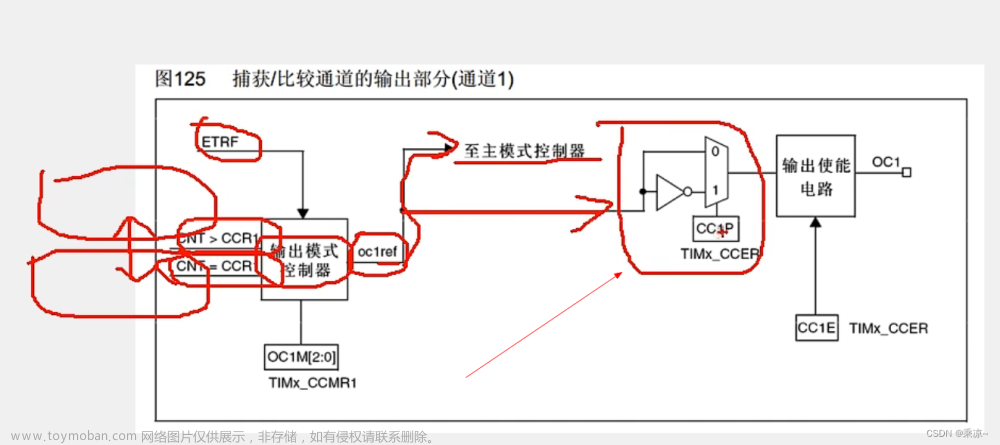
上图的输出比较电路就对应上一节,通用定时器的如下图的红框部分: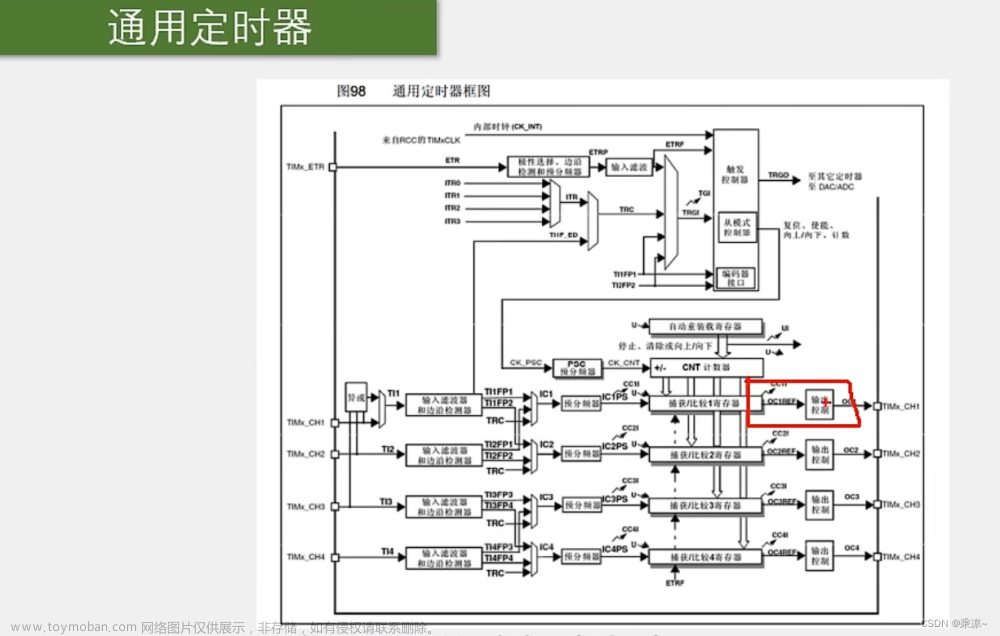
左边是CNT和CCR比较的结果,右边就是输出比较电路,最后通过TIM_CH1输出到GPIO引脚上,下面还有三个同样的单元,分别输出到CH2、CH3、CH4;
-
在上图的输出比较电路图中,左边就是CNT计数器和CCR1第一路的捕获/比较寄存器,他俩进行比较,当CNT>CCR1时,或者CNU=CCR1时,就会给输出模式控制器传一个信号,然后输出模式控制器就会改变它输出oc1ref的高低电平,REF信号实际上就是指这里的高低电平;REF是refense的缩写,即参考信号;
-
ref信号会到达上述箭头所指位置,这是一个极性选择,给这个寄存器0,信号就会往上走,就是信号电平不反转;给这个寄存器写1,信号就会往下走,就是信号通过一个非门取反,那输出的信号就是输入信号高低电平反转的信号;这就是极性选择,就是选择是不是要把高低电平反转一下;
-
再往后是输出使能电路,选择要不要输出;
-
最后是OC1引脚,这个引脚就是CH1通道的引脚;
那么输出模式控制器,什么时候给ref输出高电平,什么时候给ref输出低电平呢?就是下面2.3节输出比较模式的内容;
2.2 输出比较通道(高级)

2.3 输出比较模式
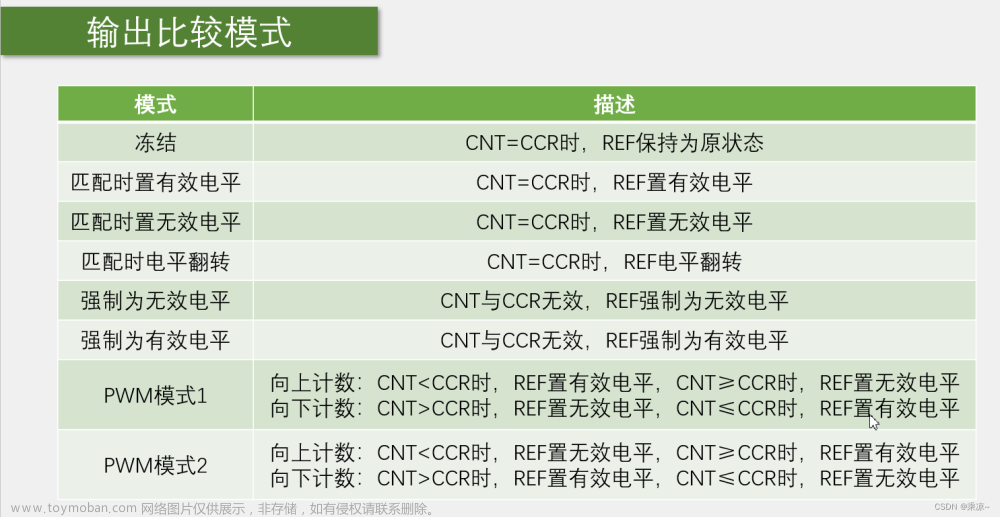
- 可以这么理解:置有效电平就是置高电平,置无效电平就是置低电平;
- PWM模式1和PWM模式2非常重要,它们可以用于输出频率和占空比都可调的PWM波形;也是我们主要使用的模式
- PWM模式1,我们一般使用向上计数的方式;PWM模式2实际上就是PWM模式1的取反;
PWM模式1是怎么输出频率和占空比都可调的PWM波形的呢?看3.1节PWM基本结构所讲的内容;
三、PWM基本知识
3.1 PWM基本结构
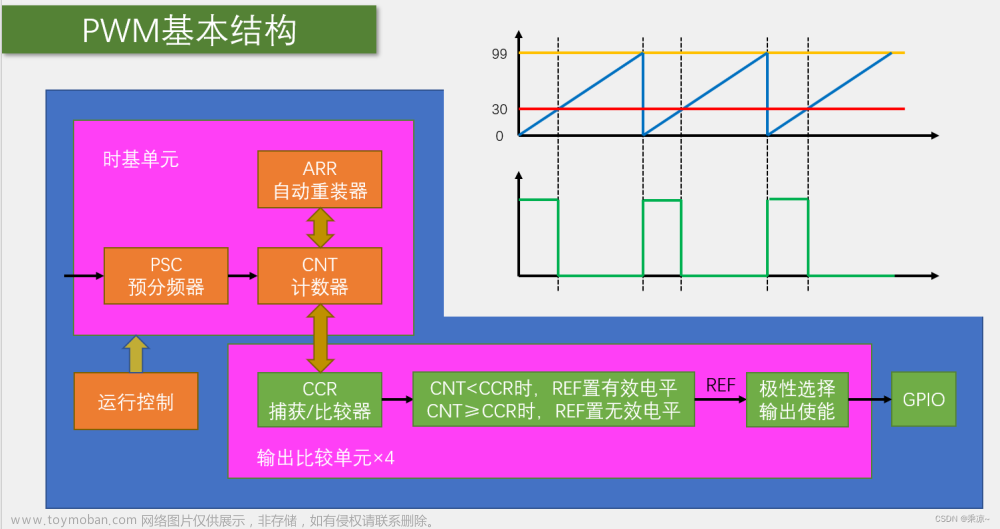
- CCR是我们自己设置的一个目标值;CNT是一个计数器在不断地自增;同时它俩还在不断进行比较;
- CCR捕获/比价器后面的就是输出模式控制器;以PWM模式1为例,里面写的也是PWM模式1的执行逻辑;
整个过程如下图所示:
红线代表CCR值,是可以预先设定的;蓝线代表CNT值;绿线代表输出的REF值;
- 当CCR小于CNT值时,输出为有效电平(高电平),当CCR大于等于CNT时,输出的REF为无效电平(低电平);
- 所以,PWM的占空比是受CCR值调控的,如果CCR值设置的高,输出的占空比就变大;反之如果CCR设置的低一些,那么输出的占空比就会变小;
- 最终经过输出比较,输出的REF就是一个频率可调,占空比也可调的PWM波形了;
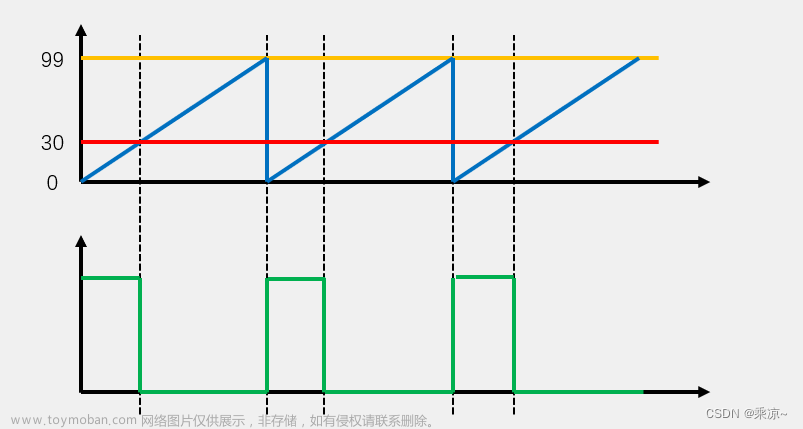
3.2 PWM参数计算

PWM各个参数的计算,记住公式就行,写代码设置具体参数的时候要用到的;
- CK_PSC通俗说就是单片机的72MHz
- 蓝线是CNT,黄线是ARRF,红线是CCR
四、舵机和直流电机介绍
4.1 舵机简介
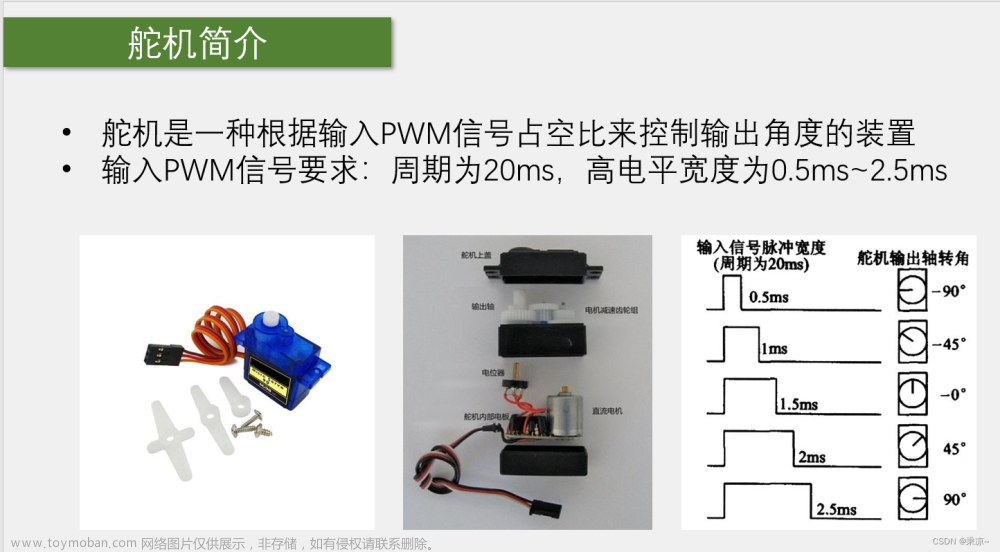
- 总结来说就是,给舵机输入一个PWM波形,输出轴就会固定在一个角度;
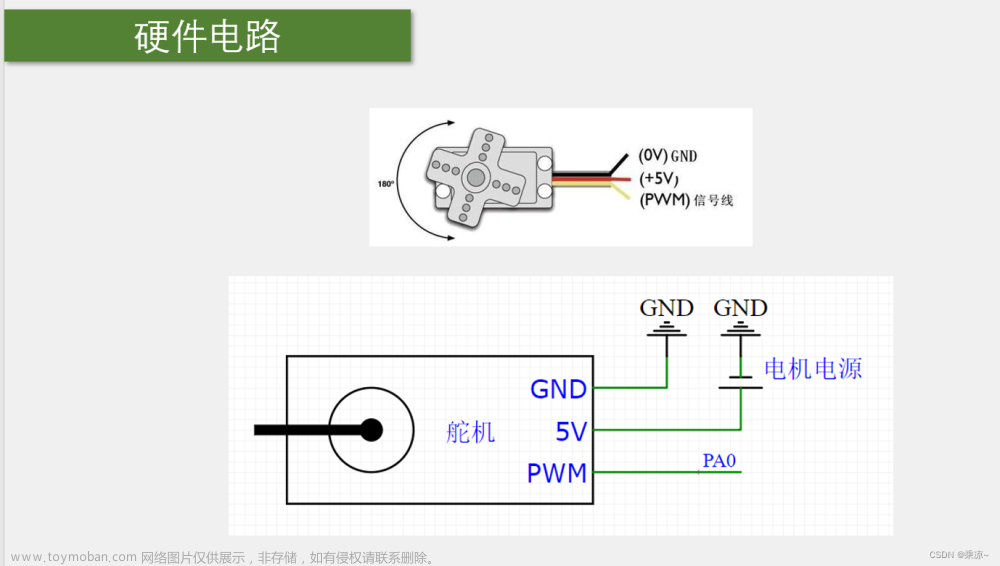
4.2 舵机硬件电路
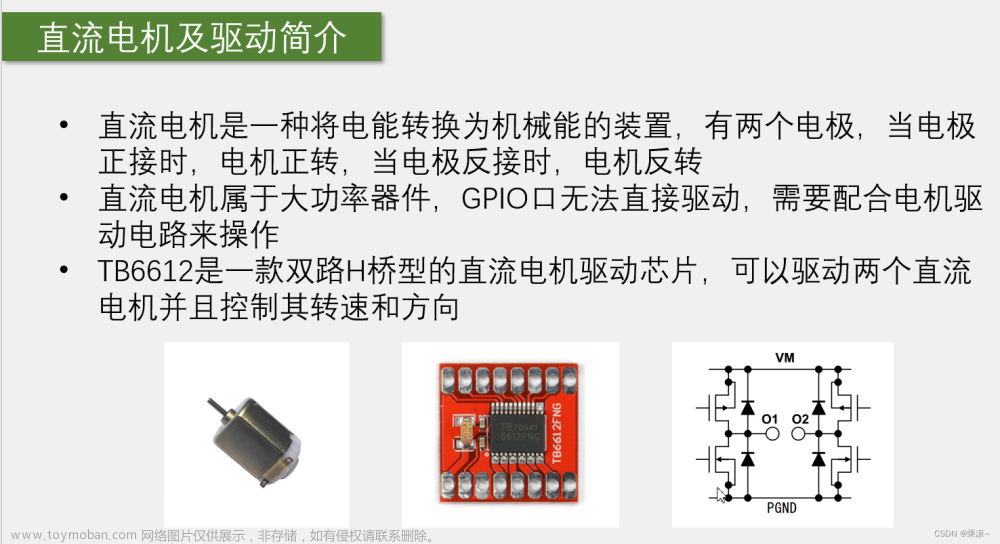
4.3 直流电机及驱动简介
 文章来源:https://www.toymoban.com/news/detail-490903.html
文章来源:https://www.toymoban.com/news/detail-490903.html
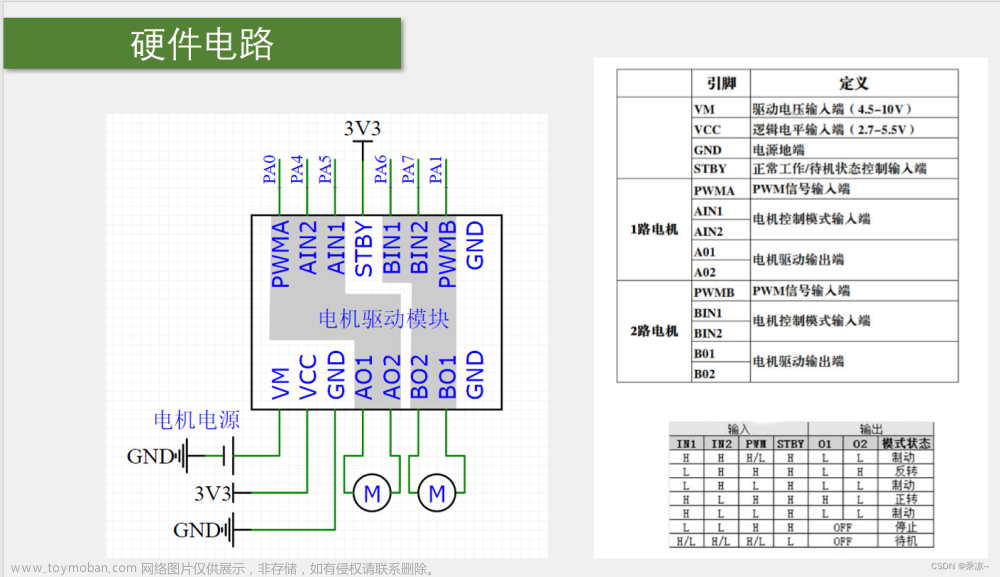
4.4 直流电机硬件电路
 文章来源地址https://www.toymoban.com/news/detail-490903.html
文章来源地址https://www.toymoban.com/news/detail-490903.html
- 上图的PWMA、AIN2、AIN1三个脚可以控制点击的正反转和速度;具体控制方式要参考右下角的输入输出表,分以下几种情况
- 当IN1为L,IN2为H时:PWM给H高电平,电机反转;当PWM给L低电平时,电机制动
- 当IN1为H,IN2为L时:PWM给H高电平,电机正转;当PWM给L低电平时,电机制动
- 至于电机的转动速度,取决于PWM的占空比,前面有介绍。
到了这里,关于STM32单片机(六)TIM定时器 -> 第三节:TIM输出比较的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!