1.客户端软件MVS的安装
1.1安装包的下载和解压
去 官网 下载两个软件安装,分别是客户端和开发环境。(这里我们下载V2.1.1(Linux)和Runtime组件包(Linux)):
工业相机文档/安装包中的不同安装版本安装包里有各个系统及arm开发板使用的安装包,选择相应的安装包进行安装(这里我们选择最后一个):

右键提取,进入提取后的文件夹,右键打开终端。
1.2安装步骤
Step1:切换root权限
rm@rm:~/下载/MVS-2.1.1_x86_64_20211224$ sudo su
Step2:运行安装脚本
rm@rm:~/下载/MVS-2.1.1_x86_64_20211224$ ./setup.sh
安装完成后,/opt路径下会生成MVS文件夹,包含以下内容:

1.3 MVS客户端的运行
进入bin目录,运行MVS,即可打开客户端 
连接海康工业相机之后,通过其官方提供的MVS客户端,我们可以设置相关相机参数,来调整图像,达到我们想要的效果,但是如此众多的相机参数,我们该如何集成进入我们程序呢,接下来就是我们的SDK二次开发。

2.参数的设置
2.1 SDK 用户指南的阅读
-
在 opt/MVS/doc 目录下,我们可以找到 工业相机Linux SDK用户指南V3.2.0(C).html ,经查询SDK文档,可以发现,他们提供了一套通用接口,来对相机进行参数获取与设置。
-
通用接口把相机参数,分成六大类,除command参数外,每一类提供Set/Get接口来设置与获取相关节点

如整形数据的获取与设置

-
相机所有开放的属性值都可参考 相机参数节点表 进行查询,此节点表对每个节点的名称、数据类型、数值范围定义、访问模式和节点描述进行了详细说明。对着表可以对参数进行详细的设置。

2.2 MVS 客户端的联合使用
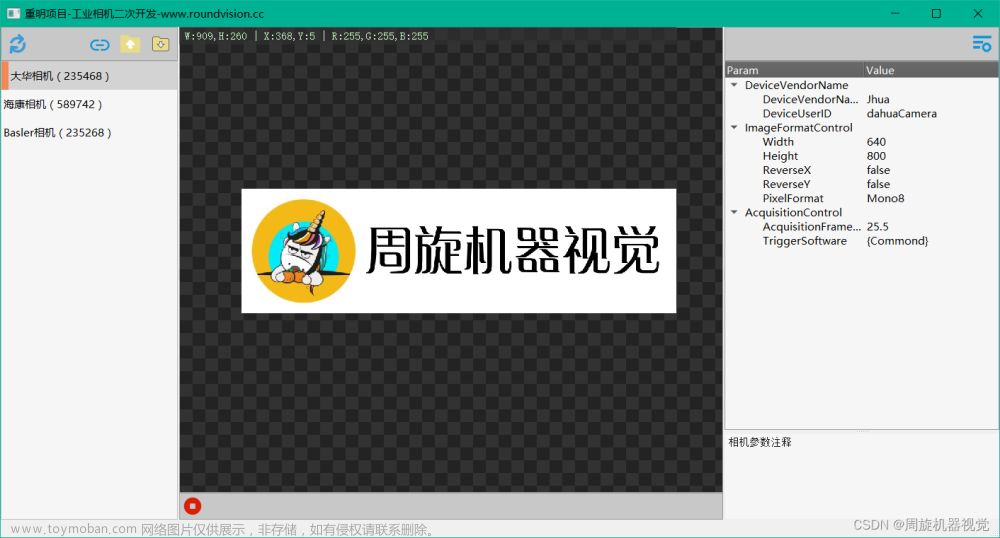
通过查表,我们可以知道key值该填什么,key值的属性是什么,但是,这样子太慢了。为确定我想调的参数在xml表的位置,还需要在MVS客户端中进行定位。那么有没有更为简单快速的方法? 通过观察MVS客户端,有一个更简单的方法能够知道相机参数的属性,类型等,可以快速方便的对参数进行操作
-
在MVS中找到自己想要的参数,鼠标选中它,在MVS右下角,参数描述中,能看看该参数的节点名、类型、取值范围、步进等信息
 其节点名为上图可知,图像宽度“Height”,类型是“int”,取值范围是32~2480,步进是2;根据类型,我们就可以选用 MV_CC_GetIntValue/MV_CC_SetIntValue来对该属性进行操作;
其节点名为上图可知,图像宽度“Height”,类型是“int”,取值范围是32~2480,步进是2;根据类型,我们就可以选用 MV_CC_GetIntValue/MV_CC_SetIntValue来对该属性进行操作;
2.3 六类参数的获取和设置(例)
-
获取/设置 Bool 类型节点值
// 获取bool型变量
// get IBoolean variable
bool bGetBoolValue = false;
nRet = MV_CC_GetBoolValue(handle, "ReverseX", &bGetBoolValue);
if (MV_OK == nRet)
{
if (0 != bGetBoolValue)
{
printf("ReverseX current is true\n\n");
}
else
{
printf("ReverseX current is false\n\n");
}
}
// 设置bool型变量
// set IBoolean variable
int nSetBoolValue;
bool bSetBoolValue;
printf("please input the ReverseX to set(bool): ");
scanf("%d", &nSetBoolValue);
if (0 != nSetBoolValue)
{
bSetBoolValue = true;
}
else
{
bSetBoolValue = false;
}
nRet = MV_CC_SetBoolValue(handle, "ReverseX", bSetBoolValue);
if (MV_OK == nRet)
{
printf("Set ReverseX OK!\n\n");
}
else
{
printf("Set ReverseX Failed! nRet = [%x]\n\n", nRet);
}
-
获取/设置 Enum 类型节点值
// 获取enum型变量
// get IEnumeration variable
MVCC_ENUMVALUE stTriggerMode = {0};
nRet = MV_CC_GetEnumValue(handle, "TriggerMode", &stTriggerMode);
if (MV_OK == nRet)
{
printf("TriggerMode current value:%d\n", stTriggerMode.nCurValue);
printf("supported TriggerMode number:%d\n", stTriggerMode.nSupportedNum);
for (unsigned int i = 0; i < stTriggerMode.nSupportedNum; ++i)
{
printf("supported TriggerMode [%d]:%d\n", i, stTriggerMode.nSupportValue[i]);
}
printf("\n");
}
else
{
printf("get TriggerMode failed! nRet [%x]\n\n", nRet);
}
// 设置enum型变量
// set IEnumeration variable
unsigned int nTriggerMode = 0;
printf("please input the TriggerMode to set:");
scanf("%d", &nTriggerMode);
nRet = MV_CC_SetEnumValue(handle, "TriggerMode", nTriggerMode);
if (MV_OK == nRet)
{
printf("set TriggerMode OK!\n\n");
}
else
{
printf("set TriggerMode failed! nRet [%x]\n\n", nRet);
}
-
获取/设置 Float 类型节点值
// 获取float型变量
// get IFloat variable
MVCC_FLOATVALUE stExposureTime = {0};
nRet = MV_CC_GetFloatValue(handle, "ExposureTime", &stExposureTime);
if (MV_OK == nRet)
{
printf("exposure time current value:%f\n", stExposureTime.fCurValue);
printf("exposure time max value:%f\n", stExposureTime.fMax);
printf("exposure time min value:%f\n\n", stExposureTime.fMin);
}
else
{
printf("get exposure time failed! nRet [%x]\n\n", nRet);
}
// 设置float型变量
// set IFloat variable
float fExposureTime = 0.0f;
printf("please input the exposure time to set: ");
scanf("%f", &fExposureTime);
nRet = MV_CC_SetFloatValue(handle, "ExposureTime", fExposureTime);
if (MV_OK == nRet)
{
printf("set exposure time OK!\n\n");
}
else
{
printf("set exposure time failed! nRet [%x]\n\n", nRet);
}
-
获取/设置 Int 类型节点值
// 获取int型变量
// get IInteger variable
MVCC_INTVALUE stHeight = {0};
nRet = MV_CC_GetIntValue(handle, "Height", &stHeight);
if (MV_OK == nRet)
{
printf("height current value:%d\n", stHeight.nCurValue);
printf("height max value:%d\n", stHeight.nMax);
printf("height min value:%d\n", stHeight.nMin);
printf("height increment value:%d\n\n", stHeight.nInc);
}
else
{
printf("get height failed! nRet [%x]\n\n", nRet);
}
// 设置int型变量
// set IInteger variable
unsigned int nHeightValue = 0;
printf("please input the height to set:");
scanf("%d", &nHeightValue);
// 宽高设置时需考虑步进(2),即设置宽高需2的倍数
// Step (16) should be considered when setting width and height, that is the width and height should be a multiple of 2
nRet = MV_CC_SetIntValue(handle, "Height", nHeightValue);
if (MV_OK == nRet)
{
printf("set height OK!\n\n");
}
else
{
printf("set height failed! nRet [%x]\n\n", nRet);
}
-
获取/设置 String 类型节点值
// 获取string型变量
// get IString variable
MVCC_STRINGVALUE stStringValue = {0};
nRet = MV_CC_GetStringValue(handle, "DeviceUserID", &stStringValue);
if (MV_OK == nRet)
{
printf("Get DeviceUserID [%s]\n\n", stStringValue.chCurValue);
}
else
{
printf("Get DeviceUserID Failed! nRet = [%x]\n\n", nRet);
}
// 设置string型变量
// set IString variable
unsigned char strValue[256];
printf("please input the DeviceUserID to set(string):");
scanf("%s", strValue);
nRet = MV_CC_SetStringValue(handle, "DeviceUserID", (char*)strValue);
if (MV_OK == nRet)
{
printf("Set DeviceUserID OK!\n\n");
}
else
{
printf("Set DeviceUserID Failed! nRet = [%x]\n\n", nRet);
}
-
设置 Command 类型节点值
nRet = MV_CC_SetCommandValue(pUser, "TriggerSoftware");
if(MV_OK != nRet)
{
printf("failed in TriggerSoftware[%x]\n", nRet);
}
nRet = MV_CC_GetOneFrameTimeout(pUser, pData, nDataSize, &stImageInfo, 1000);
if (nRet == MV_OK)
{
printf("GetOneFrame, Width[%d], Height[%d], nFrameNum[%d]\n",
stImageInfo.nWidth, stImageInfo.nHeight, stImageInfo.nFrameNum);
}
else
{
printf("Get One Frame failed![%x]\n", nRet);
}
3.开发过程中遇到的问题
3.1 SDK 文档中参数的节点名、类型、取值范围、步进等信息与MVS 客户端中不同
在参数设置过程中会发现SDK 文档中参数的节点名、类型、取值范围、步进等信息与MVS 客户端中不同,比如帧率的类型,宽度和高度的步进,或者缺少水平合并和垂直合并等,在这里我们以MVS客户端 中的数据为准。这里就更体现了 2.2MVS客户端联合使用的必要性。
3.2 错误码的解读
-
所有工业相机SDK接口都会返回相应的值。如果函数正常完成而没有检测到任何错误,则返回值为MV_OK,否则返回错误码 。文章来源:https://www.toymoban.com/news/detail-491077.html
-
SDK 文档中已经有对于错误码的必要介绍,更详细请访问链接海康工业相机SDK错误码常见场景解析文章来源地址https://www.toymoban.com/news/detail-491077.html
到了这里,关于Linux下海康威视工业相机的SDK二次开发的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!