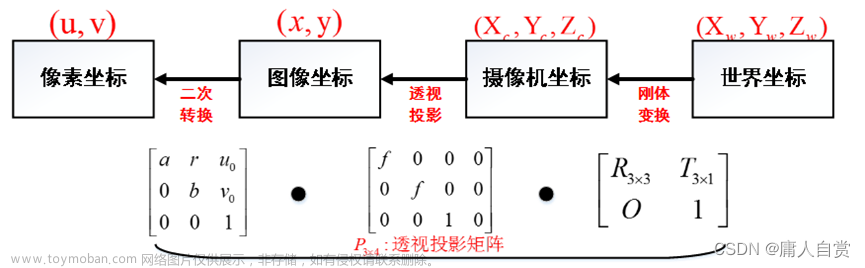
相机坐标系
相机坐标系——>像素坐标系
本文所述的相机坐标系的意思是以该相机为参考,也就是世界坐标系的原点为该相机,来观测P的坐标。
在通俗理解下的相机坐标系与像素坐标系之间只差一个cx和cy。一定要注意
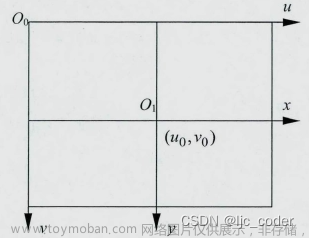
一个相机A的坐标系为L1,此时一个空间的点P距离相机50m,x方向偏10m,y方向偏5m,那么在相机A坐标系L1下,P点的坐标为(10,5,50)。若相机的内参为K,若在相机A成像平面像素点坐标为p1(u1,v1),如下图所示
那么此时P点坐标是在相机A的坐标系下观测到的,所以在A的相机坐标系下P点的坐标就是(10,5,50)。则将P映射到相机A的像素平面像素坐标系下就只需要相机A的内参K1即可:
可以看到,从相机坐标系到像素坐标系的映射仅仅需要内参K就可以完成。
但是,反过来从像素坐标映射到相机坐标就需要额外的约束,比如相机的离地高度,通过测距方法得到深度Z,这个后面再讨论。
相机A坐标系——>相机B坐标系——>相机B像素坐标系
如图1,若一个相机B的坐标系为L2,与相机A坐标系L1的外参为R,t。即:
此时不知道点P在L2坐标系下的坐标,只知道P在L1下的坐标,就有:
K2为相机B的内参。
相机坐标系——>世界坐标系
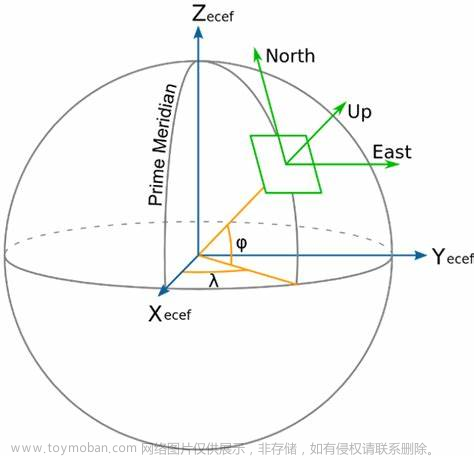
其实和我们上面的相机A坐标系——>相机B坐标系——>相机B像素坐标系非常相似,只不过世界坐标系是我们人为定义的,一般的我们认为世界坐标系绝对垂直于地面,并且x-y面平行于相机成像平面。所以我们在做相机外参标定,设计靶标时就是假设靶标是一个假设的、完美的世界坐标系。
同上相机A坐标系——>相机B坐标系——>相机B像素坐标系,我们把相机A看作是世界坐标系,相机B是我们观测的相机坐标系,我们知道世界坐标系下P的坐标,知道相机坐标系和世界坐标系的外参R,t,利用同样的公式可以计算出在观测相机像素坐标系下点的坐标。文章来源:https://www.toymoban.com/news/detail-492966.html
总结
在谈论内参外参的时候,我们一定要清楚内参的作用范围,即本相机坐标系到本相机像素坐标系的映射,外参的作用对象,对于小白来说(我自己)太重要了。文章来源地址https://www.toymoban.com/news/detail-492966.html
到了这里,关于相机坐标系的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!