作者:朱金灿
来源:clever101的专栏
为什么大多数人学不会人工智能编程?>>>
一.2D笛卡尔坐标系的定义
2D笛卡尔坐标系具有以下特点:
1.2D笛卡尔坐标系都具有一个原点,原点坐标为(0,0);
2.2D笛卡尔坐标系都有两条过原点向两边无限延伸的直线,称之为轴;
2D笛卡尔坐标系轴的方向可以是如下形式: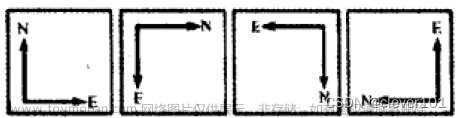
可以看到上图中第二、三和四种形式都是从第一种形式旋转得到的。
二.左手坐标系和右手坐标系
坐标系是左手坐标系还是右手坐标系的判定方法如下:大拇指指向+x方向,食指指向+y方向,中指指向+z方向。如下图: 文章来源:https://www.toymoban.com/news/detail-495432.html
文章来源:https://www.toymoban.com/news/detail-495432.html
三.世界坐标系、物体坐标系、摄像机坐标系和惯性坐标系
世界坐标系是指你所关注的东西的最大的坐标系。物体坐标系是指和特定物体相关的坐标系。摄像机坐标系是指以摄像机为原点来观察的坐标系。惯性坐标系的原点和物体坐标系的原点重合,但是惯性坐标系的轴平行于世界坐标系的轴。惯性坐标系实际上是物体坐标系和世界坐标系的一个转换媒介。文章来源地址https://www.toymoban.com/news/detail-495432.html
到了这里,关于3D开发学习之笛卡尔坐标系的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!











