【ROS】郭老二博文之:ROS目录
1、简介
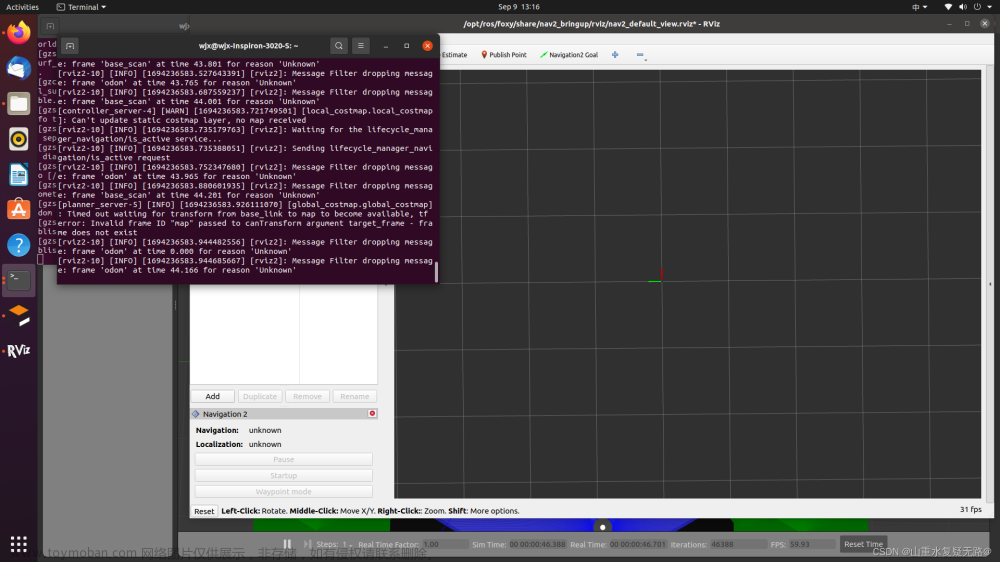
在ROS2中自动导航使用Nav2来实现。
Nav2 使用几个独立的模块化服务,通过 ROS 2接口(例如动作服务器或服务)与行为树 (BT) 通信。
Nav2 输入包括:TF转换、一个地图源、一个行为树 (BT) XML 文件和相关的传感器数据源;
Nav2 输出速度命令;
Nav2 支持多种机器人,比如:四足机器人、履带机器人、轮式机器人等文章来源:https://www.toymoban.com/news/detail-496115.html
2、概念
1)动作服务器(Action Server):由话题和服务协作完成,例如:开始执行动作、动作是否响应、传输执行动作时的过程数据、动作完成反馈等。
2)生命周期节点(Lifecycle Nodes):管理ROS2系统中的节点生命周期,比如节点的启动、未激活、激活、关闭等行为
3)行为树(BT,Behavior Trees):创建了一个更具可扩展性和人类可理解的框架,用于定义多步骤或多状态应用程序,构建复杂的机器人行为
4)Planner:路径规划,比如,最短路径、路径全覆盖、预定义路径
5)Controller:控制,ROS1中称为本地规划,比如,解决动态障碍物的情况
6&#x文章来源地址https://www.toymoban.com/news/detail-496115.html
到了这里,关于【ROS】ROS2导航Nav2:简介、安装、测试效果、错误处理的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!