NUCLEO-F411RE RT-Thread 体验 (9) - GCC环境 PWM的驱动移植以及简单使用
驱动移植
驱动位于drv_pwm.c文件中,components层代码位于rt_drv_pwm.c中。
修改Makefile文件

修改配置文件rtconfig.h
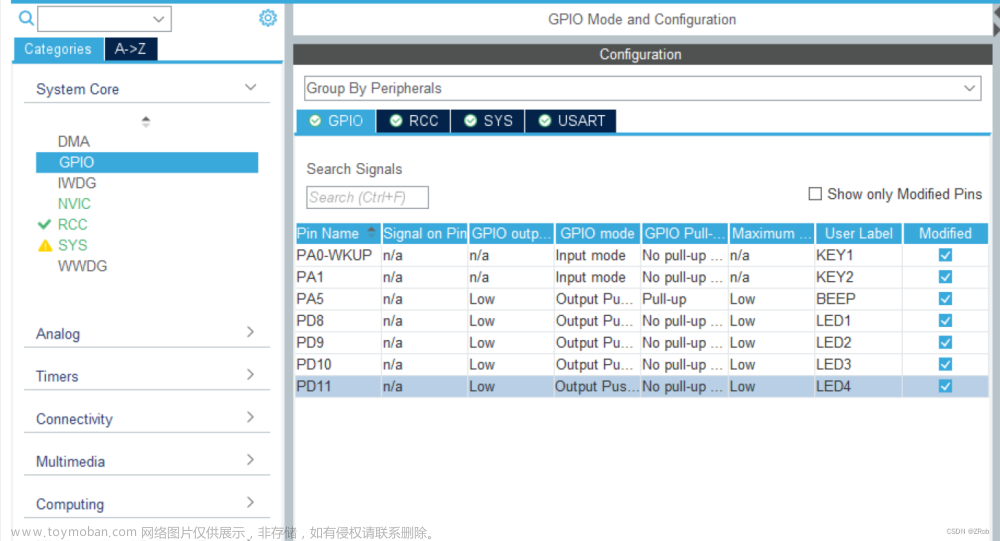
LED2链接PA5,而TIM2_CHANNEL1可从PA5输出PWM,所以我们需要配置TIM2,并使能TIM2_CH1.

修改RT-Thread-basic/Core/Src/stm32f4xx_hal_msp.c

HAL_TIM_MspPostInit 函数在stm32_hw_pwm_init函数中被调用。主要配置PA5。
HAL_TIM_PWM_MspInit函数在HAL_TIM_PWM_Init中被调用。而HAL_TIM_PWM_Init在stm32_hw_pwm_init中被调用。
RT-Thread-basic/libraries/HAL_Drivers/config/f4/pwm_config.h

此处channel并不与实际channel1对应,后面会重新赋值。
编译后,list_device后会出现pwm2设备
使用pwm命令测试
rt_drv_pwm.c中封装了pwm_set pwm_get pwm_enable pwm_disable
假设设置1KHZ 占空比50%的波形,命令如下:
pwm_set pwm2 1 1000000 500000
pwm_enable pwm2 1
period单位为ns,1s = 1000 * 1000 * 1000 ns
1Khz,每个周期占1/1000 = 1ms,1ms = 1000 * 1000ns,duty cycle 占一半,为500*1000ns。
驱动中如何设置的呢?
主要是做了个转换,
1s = 1000 * 1000 * 1000,那么1ms = 1000 * 1000,换成100M的工作频率即为1ms = 100 * 1000,所以period = (传过来的periond * timeclock)/ (1000 * 1000 * 1000)。
这个period可以理解为一个周期里的计数次数,
TIM的AutoReload的最大值也是这个period,但是在0-65535之间,如果大与65535,则要经过perscaler设置一下分频。所以这里psc = (period/MaxPperiod) + 1。意思是看看period大于几倍的65535,就设置几倍的分频。文章来源:https://www.toymoban.com/news/detail-496793.html
简单测试程序
/*
* Copyright (c) 2006-2018, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2018-11-25 misonyo first implementation.
*/
/*
* 程序清单:这是一个 PWM 设备使用例程
* 例程导出了 pwm_led_sample 命令到控制终端
* 命令调用格式:pwm_led_sample
* 程序功能:通过 PWM 设备控制 LED 灯的亮度,可以看到LED不停的由暗变到亮,然后又从亮变到暗。
*/
#include <rtthread.h>
#include <rtdevice.h>
#include "board.h"
#define LED_PIN_NUM GET_PIN(A, 5) /* LED PIN脚编号,查看驱动文件drv_gpio.c确定 */
#define PWM_DEV_NAME "pwm2" /* PWM设备名称 */
#define PWM_DEV_CHANNEL 1 /* PWM通道 */
struct rt_device_pwm *pwm_dev; /* PWM设备句柄 */
static int pwm_led_sample(int argc, char *argv[])
{
rt_uint32_t period, pulse, dir;
period = 500000; /* 周期为0.5ms,单位为纳秒ns */
dir = 1; /* PWM脉冲宽度值的增减方向 */
pulse = 0; /* PWM脉冲宽度值,单位为纳秒ns */
// /* 设置LED引脚脚模式为输出 */
// rt_pin_mode(LED_PIN_NUM, PIN_MODE_OUTPUT);
// /* 拉高LED引脚 */
// rt_pin_write(LED_PIN_NUM, PIN_HIGH);
/* 查找设备 */
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
if (pwm_dev == RT_NULL)
{
rt_kprintf("pwm sample run failed! can't find %s device!\n", PWM_DEV_NAME);
return RT_ERROR;
}
/* 设置PWM周期和脉冲宽度默认值 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
/* 使能设备 */
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
while (1)
{
rt_thread_mdelay(1000);
if (dir)
{
pulse += 5000; /* 从0值开始每次增加5000ns */
}
else
{
pulse -= 5000; /* 从最大值开始每次减少5000ns */
}
if (pulse >= period)
{
dir = 0;
}
if (0 == pulse)
{
dir = 1;
}
/* 设置PWM周期和脉冲宽度 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
}
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(pwm_led_sample, pwm sample);
代码
代码下载文章来源地址https://www.toymoban.com/news/detail-496793.html
到了这里,关于NUCLEO-F411RE RT-Thread 体验 (9) - GCC环境 PWM的驱动移植以及简单使用的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!