1.STM32F103是_32_位嵌入式系统,内核是ARM公司的___Cortex-M3___。
2.STM32的所有端口都有外部中断能力。当使用外部中断线时,相应的引脚必须配置成 输入模式 。
3.STM32具有单独的位设置或位清除能力。这是通过 GPIOx->BSRR_ 和GPIOx->BRR 寄存器来实现的。
4.STM32芯片内部集成的 12位 位ADC是一种逐次逼近(比较)型模拟数字转换器,具有 18个通道 ,可测量16个外部和2个内部信号源 。
5.STM32的NVIC管理着包括Cortex-M3核异常等中断,其和ARM处理器核的接口紧密相连,可以实现 时延 的中断处理,并有效地处理 后到中断 。
6.STM32通用定时器TIM的16位计数器可以采用三种方式工作,分别为 向上计数 模式、 向下计数 模式和 向上下计数 模式。
7.当STM32的I/O端口配置为输入时, 输出缓冲器 被禁止, 施密特触发输入 被激活。根据输入配置(上拉,下拉或浮动)的不同,该引脚的 弱上拉和下拉电阻 被连接。出现在I/O脚上的数据在每个APB2时钟被采样到输入数据寄存器,对 输入数据寄存器 的读访问可得到I/O状态。
8.STM32的所有端口都有外部中断能力。当使用 外部中断线 时,相应的引脚必须配置成 输入模式 。
9.ST公司还提供了完善的通用IO接口库函数,其位于 stm32f10x_gpio.c ,对应的头文件为 stm32f10x_gpio.h 。
10.为了优化不同引脚封装的外设数目,可以把一些 复用功能 重新映射到其他引脚上。这时,复用功能不再映射到 它们原始分配的引脚 上。在程序上,是通过设置 复用重映射和调试I/O配置寄存器(AFIO_MAPR) 来实现引脚的重新映射.
11.STM32的 USART 为通用同步异步收发器,其可以与使用工业标准 NRZ 异步串行数据格式的外部设备之间进行全双工数据交换。
12.STM32的USART可以利用 分数波特率 发生器提供宽范围的波特率选择。
13.智能卡是一个 单线半双工 通信协议,STM32的智能卡功能可以通过设置USART_CR3寄存器的 SCEN 位来选择。
14.STM32提供了CAN总线结构,这是一种 基本扩展 CAN(Basic Extended CAN),也就是 bxCAN 。
15.简述基于ARM Cortex-M3的STM32芯片特点。
答:ST公司的STM32系列芯片采用了ARM Cortex-M3内核,其分为两个系列。STM32F101系列为标准型,运行频率为36MHz;STM32F103系列为标准型,运行频率为72MHz。STM32全系列芯片都具有引脚到引脚一一对应的特点,并且相同封装的内部资源均相同,这就给用户升级带来很大方便。
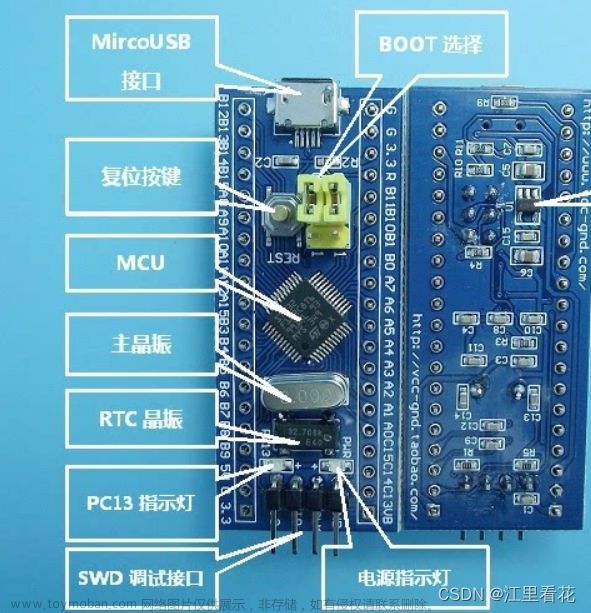
16.简述STM32最小硬件开发系统的组成及其各部分的作用。
答:读者可以参阅正文中的第3节,其中包括如下几个部分:
- 主芯片:采用STM32系列,为整个开发系统的核心,本书所有的程序都运行在其中。
- 晶体振荡部分:提供了硬件时序以及实时时钟使用。
- 供电部分:采用AM1117为芯片提供稳定的3.3V电压。
复位部分:采用一个按键开关来实现
17.简述嵌套向量中断控制器(NVIC)的主要特性。
支持嵌套和向量中断
43个可屏蔽中断通道;
16个可编程的优先等级;
低延迟的异常和中断处理;
电源管理控制;
系统控制寄存器的实现;
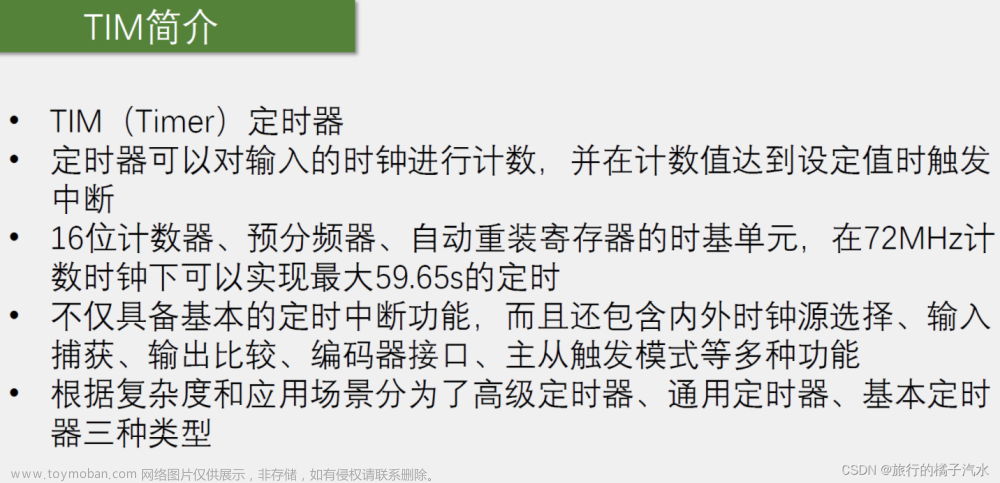
18.简述STM32中TIM功能特点。
STM32提供了高级控制定时器TIM1/8,通用定时器TIM2~5,基本定时器TIM6/7。这几个定时器都是由可编程预分频器驱动的16 位自动装载计数器构成。它们都可以做一些基本的定时,还可以做PWM输出或者输入捕获。除此之外,高级控制定时器具有刹车输入,互补输出和重复次数计数器功能,基本定时器具有触发DAC同步电路的功能。
19.简述STM32中ADC功能特点。
STM32 ADC是12位逐次比较型ADC,有18个通道,可测量16个外部、2个内部信号源。各通道的A/D转换可以单次、连续、扫描或间断模式执行。ADC的结果可以左对齐或右对齐方式存储在16位数据寄存器中。模拟看门狗特性允许应用程序检测输入电压是否超出用户定义的高/低阈值。
20.简述STM32的不同复用功能的重映射功能。
STM32有很多的内置外设,这些内置外设都是与I/O口共用引出引脚,通过相应的配置,很多复用功能的引脚可以通过重映射,从不同的I/O管脚引出。既方便了用户进行PCB设计,还可以虚拟地增加复用功能的数量
21.STM32高级定时器有哪些功能?
高级定时器TIM1适合多种用途,包含测量输入信号的脉冲宽度,或者产生输出波形。使用定时器预分频器和RCC时钟控制预分频器,可以实现脉冲宽度和波形周期从几个微秒到几个毫秒的调节。
22.STM32的GPIO的配置模式有那几种?如何进行配置模式的配置?
8种
1.GPIO_Mode_AIN模拟输入
2.GPIO_Mode_IN_FLOATING浮空输入
3.GPIO_Mode_IPD下拉输入
4.GPIO_Mode_IPU上拉输入
5.GPIO_Mode_Out_OD开漏输出
6.GPIO_Mode_Out_PP推挽输出
7.GPIO_Mode_AF_OD复用开漏输出
8.GPIO_Mode_AF_PP复用推挽输出
23.简述STM32的USART的功能特点。、
答:STM32的USART为通用同步异步收发器,其可以与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换。USART还可以利用分数波特率发生器提供宽范围的波特率选择。
STM32的USART支持同步单向通信和半双工单线通信。同时,其也支持LIN(局部互连网),智能卡协议和IrDA(红外数据)SIR ENDEC规范,以及调制解调器(CTS/RTS)操作。STM32还具备多处理器通信能力。另外,通过多缓冲器配置的DMA方式,还可以实现高速数据通信。
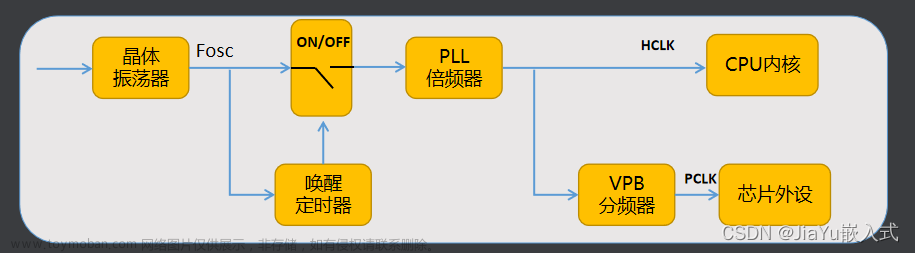
24.简述STM32时钟的类型。
答:STM32提供了三种不同的时钟源,其都可被用来驱动系统时钟SYSCLK,这三种时钟源分别为:
- HSI振荡器时钟
- HSE振荡器时钟
- PLL时钟
这三种时钟源还可以有以下2种二级时钟源:
- 32kHz低速内部RC,可以用于驱动独立看门狗和RTC。其中,RTC用于从停机/待机模式下自动唤醒系统。
- 32.768kHz低速外部晶振也可用来驱动RTC(RTCCLK)。
任一个时钟源都可被独立地启动或关闭,这样可以通过关闭不使用的时钟源来优化整个系统的功耗。
25.简述DMA控制器的基本功能。
答:STM32的DMA 控制器有7个通道,每个通道专门用来管理来自于一个或多个外设对存储器访问的请求。还有一个仲裁器来协调各个DMA 请求的优先权。DMA 控制器和Cortex-M3 核共享系统数据线执行直接存储器数据传输。因此,1 个DMA请求占用至少2 个周期的CPU 访问系统总线时间。为了保证Cortex-M3 核的代码执行的最小带宽,DMA 控制器总是在2 个连续的DMA 请求间释放系统时钟至少1 个周期。
26、编制控制一个蜂鸣器的程序,蜂鸣器鱼GPIO的B口的第五引脚,#include "stm32f10x.h"
#include "stm32f10x.h"
void RCC_Configuration(void);
main(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_Configuration();
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
}文章来源地址https://www.toymoban.com/news/detail-497522.html
void RCC_Configuration()
{
SystemInit();
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
}
27、编制一个循环点亮LED灯的程序。有4个发光二极管,它们的公共极(阳极)接+5V,阴极通过限流电阻分别于PB12、PB13、PB14、PB15,每次控制其中某个LED灯点亮1S后,转到下一个LED灯亮,循环不止。#include“stm32f10x_map.h”
#include“stm32f10x_map.h”
char sec=0,sec1=0;
unsigned short led_dat[4]={1<<12,1<<13,1<<14,1<<15};
char led_num=0;
int main(void)
{
SysTick->LOAD=1E6;
SysTick->CTRL=1;
RCC->APB2ENR|=1<<3;
GPIOB->CRH&=0x0000 ffff;
GPIOB->CRH|=0x3333 0000;
while (1)
{
if(SysTick->CTRL & 1<<16)
{
sec+=1;
if((sec & 0xf)>9)
sec+=6;
}
if(sec!=sec1)
{
sec1=sec;
GPIOB->BSRR=0xf000;//灭所有LED灯
GPIOB->BRR=led_dat[led_num];//亮指定LED灯
if(++led_num==4)led_num=0;
}
}
}
28.编制一个使用STM32的USART1与PC机实现串行通讯,串行口使用1位起始位、8位数据位、无校验位和1停止位,波特率位9600bps。编程实现接收PC机发送的数据后回传给PC机,#include“stm32f10x_map.h”(10分)
#include”stm32f10x_map.h”
char data;
void main(void)
{
RCC->APB2ENR|=1<<2;
RCC->APB2ENR|=1<<14;
GPIOA->CRH &=0xffff f00f;
GPIOA->CRH |=0x0000 04b0;
USART1->BRR= 0x0341;//波特率设置8000000/9600
USART1->CR1|=1<<2;
USART1->CR1|=1<<3;
USART1->CR1|=1<<13;
while(1)
{
if(USART1->SR & 1<<5)
{
data= USART1->DR;
return data;
USART1->DR =data;
while(!(USART1->SR & 1<<7));
return USART1->DR;
}
}
}
29.编制控制一个蜂鸣器的程序。
#include "stm32f10x.h"
void RCC_Configuration(void);
main(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_Configuration();
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_5;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
}
void RCC_Configuration()
{
SystemInit();
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
}
30.编制键盘控制初始化程序
Keyboard_test(void)
{
UINT8T ucChar;
UINT8T szBuf[40];
uart_printf(“\n Keyboard Test Example\n”);
uart_printf(“Press any key to exit…\n”);
Keyboard_init();
g_nKeyPress=0xFE;
While(1)
{
f_nKeyPress=0;
while(f_nKeyPress==0)
{
if(uart_tetkey()) //Press any key from UART0 to exit
return;
else if(ucChar==7) //or press 5*4 Key-7 to exit
return;
else if(g_nKeyPress!=0xFE) //or SB1202/SB1203 to exit
return;
}
iic_read_keybd(0x70,0x1,&ucChar); //get data from ZLG7290
If(ucChar!=0)
{
ucChar-key_set(ucChar); //key map for Edukit II
if(ucChar<16)
sprintf(&szBuf,”press key %d”,ucChar);
else if(ucChar<255)
sprintf(&szBuf,”press key %d”,ucChar);
if(ucChar==0xFF)
sprintf(&szBuf,”press key %c”,ucChar);
if(ucChar==0xFF)
sprintf(&szBuf,”press key FUN”);
#ifdef BOARDTEST
print_lcd(200,170,0x1c,&szBuf);
#endif
uart_printf(szBuf);
uart_printf(“\n”)
}
}
uart_printf(“end.\n”);文章来源:https://www.toymoban.com/news/detail-497522.html
}
到了这里,关于STM32复习题的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![[嵌入式软件][启蒙篇][仿真平台] STM32F103实现串口输出输入、ADC采集](https://imgs.yssmx.com/Uploads/2024/01/814721-1.gif)