💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🌈3 Matlab代码实现
🎉4 参考文献
💥1 概述
文章包含用于实现自适应识别和控制的在线顺序学习算法、元认知神经网络和前馈神经网络的代码。这些方法也用于解决分类和时间序列预测问题。
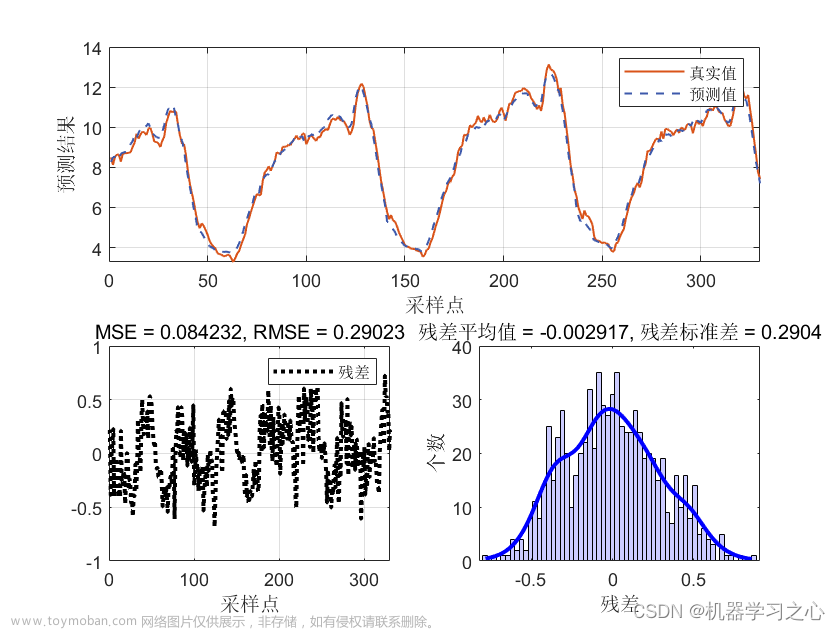
📚2 运行结果






部分代码:
%%%% IDENTIFICATION EXAMPLE 2 PART A ONE LAYER
%%%% EQUILIBRIUM STATES OF UNFORCED SYSTEM
clc;clear;
k=[1:200];
f=@(x,y)(x*y*(x+2.5)/(1+x^2+y^2));
difftanh=@(x)(sech(x));
NNclass=[2 20 1];
in=NNclass(1);n1=NNclass(2);out=NNclass(3);
W1=normrnd(0,0.3,in+1,n1); %%%% Weight Initialization
W2=zeros(n1+1,out);
eta=0.1; %%%% Learning Rate
points=1000
b=normrnd(0,4,1,points); %%%% Initial conditions seed
a=normrnd(0,4,1,points);
a_zero=[];b_zero=[];
a_two=[];b_two=[];
a_nah=[];b_nah=[];
subplot(121);
for j=1:length(b) %%%% Training the network to different initial conditions
yp=[b(j) a(j) zeros(1,length(k))];
yphat=[b(j) a(j) zeros(1,length(k))];
for i=3:length(k)+2
u=0;
yp(i)=f(yp(i-1),yp(i-2))+u;
%%% NEURAL NETWORK
% Forward Pass
A1=[1 yp(i-1) yp(i-2)]*W1;
y1=tanh(A1);
A2=[1 y1]*W2;
N=A2;
% Identification Model Ouput
yphat(i)=N+u;
% Backward Pass
e=-(yphat(i)-yp(i));
del2=e;
del1=difftanh(A1).*(del2*W2(2:end,:)');
Jw2=[1 y1]'*del2; %%%% CRAY-DIENTS
Jw1=[1 yp(i-1) yp(i-2)]'*del1;
%Weight Updation
W1=W1+eta*Jw1;
W2=W2+eta*Jw2;
end
🌈3 Matlab代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。文章来源:https://www.toymoban.com/news/detail-497644.html
[1]何儒汉,熊捷繁,熊明福.基于背景自适应学习的行人重识别算法研究[J/OL].计算机工程与应用:1-10[2022-12-20].http://kns.cnki.net/kcms/detail/11.2127.tp.20211202.1026.002.html 文章来源地址https://www.toymoban.com/news/detail-497644.html
到了这里,关于元认知神经网络与在线序贯学习(Matlab代码实现)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!