- 一、拆机
- 拍照记住机械手的初始位置,方便后期打包发货。
- 机器人型号
- 机器人编号与电柜编号必须匹配。
- 电源接线
- 进机器人电柜主电源线(三相四线制),配32A的断路器;
- 电柜机器人之间接线。
- EE接口内部接线以及外部控制接线
- EE接口:控制夹具电磁阀接线RO;
- EE接口:接收到位信号RI;
- 52A/52B接口:连接PLC外部接线;
- 内部跳线至PNP输入(系统默认NPN输入)。
- 加载备份程序
- PT格式全部文件加载;
- 寄存器数据文件加载。
- 手动操作
- 建立用户坐标系(可选择默认坐标系);
- 建立原点坐标;
- 建立夹具配重并调至使用状态;
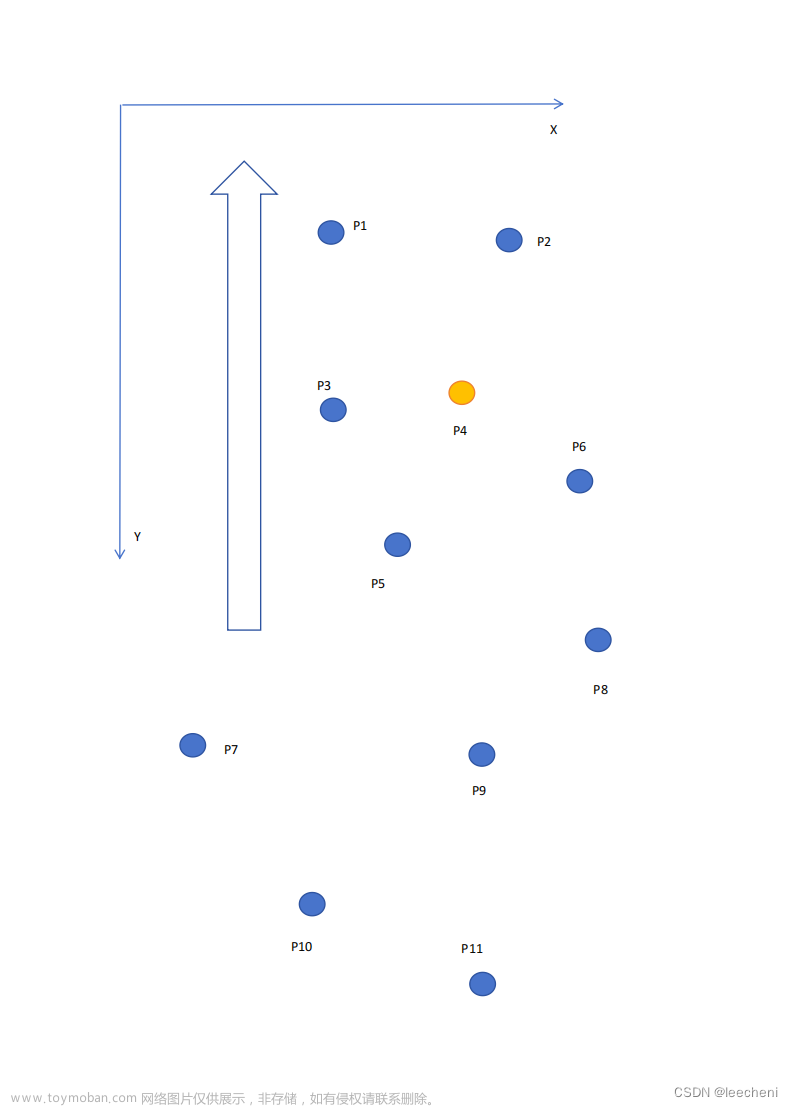
- 采集A/B抓取点、抓取过度点、放置过度点、各放置点位置;
- 选择RSR为主程序并修改编号RSR0001;
- 开启外部专用IO功能(系统参数,IO联机专用);
- 选择远程模式(系统参数,IO联机专用);
- 关闭一时停机抱闸功能(常规设置);
- 把名称为CHANPINXUANZE程序添加至后台运行并调至开启状态。
- 自动操作与PLC通讯
- 初始化:机械手自动运行至设定的原点位置;
- 暂停:运行过程中机器人停止;
- 继续运行:暂停后继续运行;
- A/B清料:把对应位置正在码的物料排走,再次开始重新从第一层第一箱开始码;
- A/B配方选择:根据配方选择不同的运行程序,适应不同的产品;
- A/B安全门:安全门一旦打开码垛机器人立即停止运行,未关闭安全门机器人无法启动运行;
- 确保以上功能正确无误。
- 打包以及注意事项
- 拆下夹具;
- 把机械手移动到拆机时记录的位置;
- 备份1A/0.75A各两枚熔断器;
- 打木架打包。
文章来源地址https://www.toymoban.com/news/detail-498634.html
文章来源:https://www.toymoban.com/news/detail-498634.html
到了这里,关于发那科机器人新机配置的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!