❤️ 专栏简介:本专栏记录了从零学习单片机的过程,其中包括51单片机和STM32单片机两部分;建议先学习51单片机,其是STM32等高级单片机的基础;这样再学习STM32时才能融会贯通。
☀️ 专栏适用人群 :适用于想要从零基础开始学习入门单片机,且有一定C语言基础的的童鞋。
🌙专栏目标:实现从零基础入门51单片机和STM32单片机,力求在玩好单片机的同时,能够了解一些计算机的基本概念,了解电路及其元器件的基本理论等。⭐️ 专栏主要内容: 主要学习STM32单片机的功能、各个模块、单片机的外设、驱动等,最终玩好单片机和单片机的外设,全程手敲代码,实现我们所要实现的功能。
🌴 专栏说明 :如果文章知识点有错误的地方,欢迎大家随时在文章下面评论,我会第一时间改正。让我们一起学习,一起进步。
💑专栏主页:http://t.csdn.cn/HCD8v
本学习过程参考:https://space.bilibili.com/383400717
STM3单片机安装软件、各种资料以及源码的路径:
链接:https://pan.baidu.com/s/1snD0uuTfMhchFqOMWvAiHA?pwd=asdf#list/path=%2F
提取码:asdf
链接里压缩包的解压密码:32
本大节主要学习USART的相关知识,包含九小节:
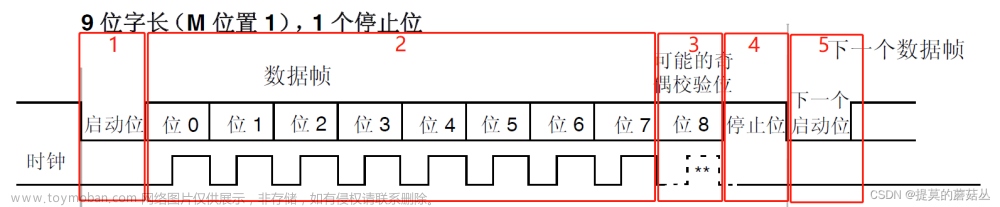
第一小节主要学习USART串口协议的理论基础知识
第二小节主要学习USART串口外设的理论基础知识
第三小节是对第一、二小节的内容写一个串口发送程序进行练习
第四小节是对第一、二小节的内容再写一个串口发送+接收的程序进行练习
第五小节主要学习USART串口数据包的理论基础知识
第六小节是对第五小节的内容写一个串口收发HEX数据包程序进行练习
第七小节是对第五小节的内容再写一个串口收发文本数据包程序进行练习
第八小节主要了解FlyMcu串口下载的知识
第九小节主要了解STLINK Utility串口下载的知识
最终附上所有的源代码;
本小节主要是对前面学习的串口理论知识再次进行实战练习:写一个串口发送+接收的程序进行练习。
一、本节目标
目标:串口发送+接收
写一个串口模块,通过串口通信,把一些数据发到电脑上的串口助手来显示,
该程序的功能是判断单片机是否收到数据,如果收到数据,则读取数据,并将数据回传到电脑同时在OLED上进行显示;
把STM32的串口引脚,接到电脑上,如下图所示: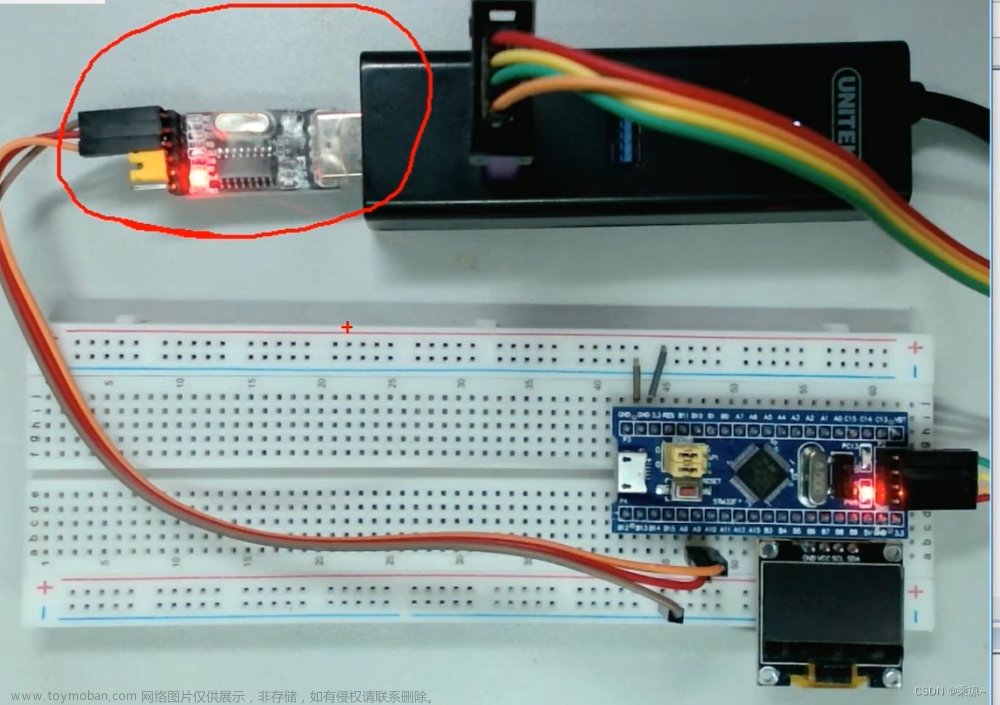
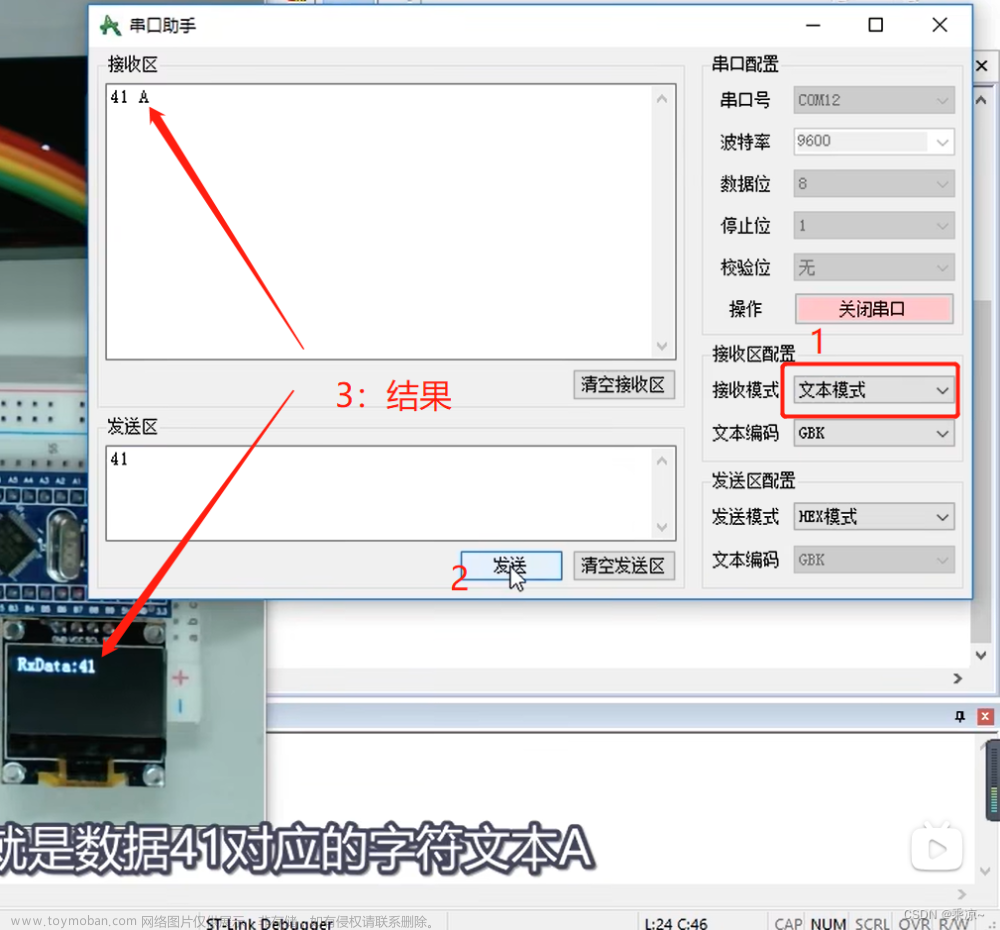
之后电脑端打开串口助手软件,按如下图进行配置,并打开串口
在发送区写一个数据41,点击发送,可以看到OLED上显示了接受到的数据为41,并且串口工具的接收区,也接收到了41这个数据;
此时如果我们把接收模式换成文本模式,再发送,可以看到,串口助手收到的信息为字符文本A了,这就是数据41对应的字符文本A了,如下图所示:
二、练习2:串口发送+接收
2.1 接线图

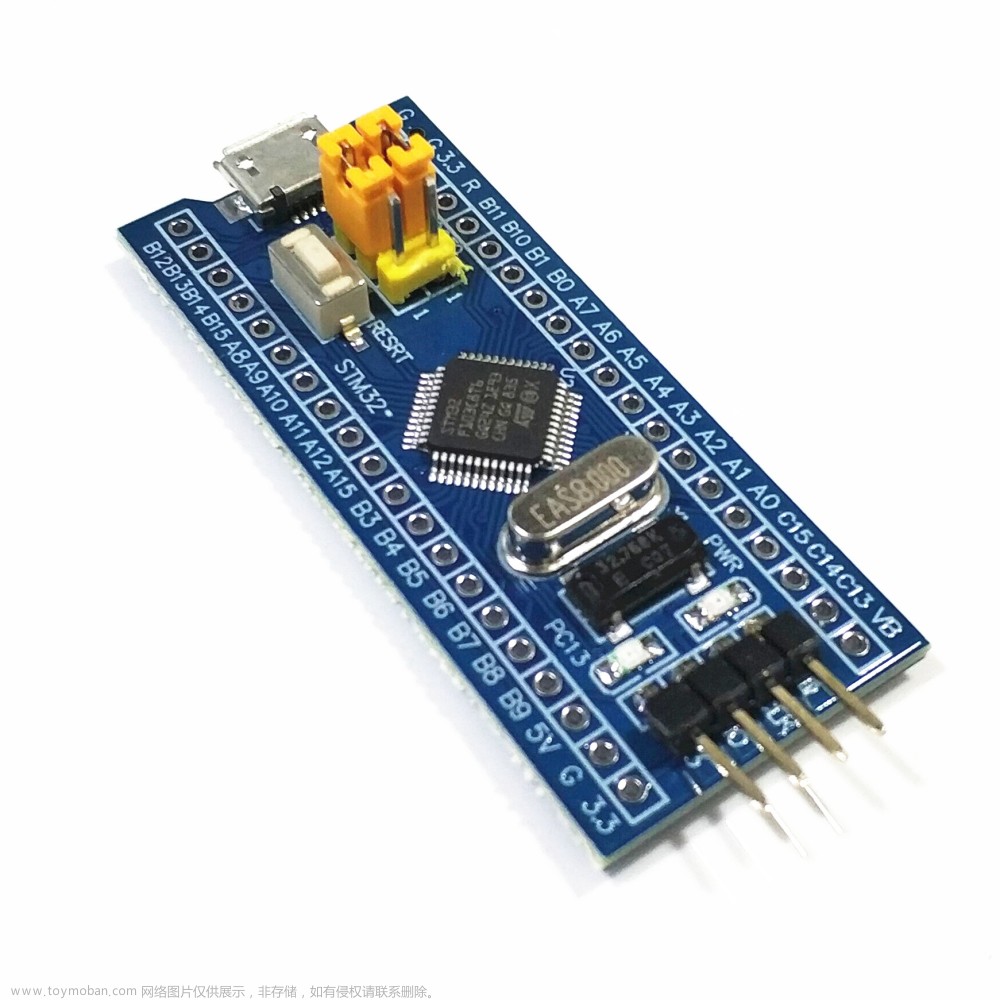
- 最下面是USB转串口模块,跳线帽要插在VCC和3V3这两个引脚上(图中黄色小块儿),选择通信的TTL电平为3.3;然后通信引脚TXD和RXD要接在STM3的PA9和PA10口,选择这两个引脚的原因是引脚定义表中USART1的TX是PA9,RX是PA10;然后USB转串口的负极和STM32的负极接在一起进行共地;
- USB转串口模块和JLINK都是要插在电脑的USB口;
硬件电路如下所示: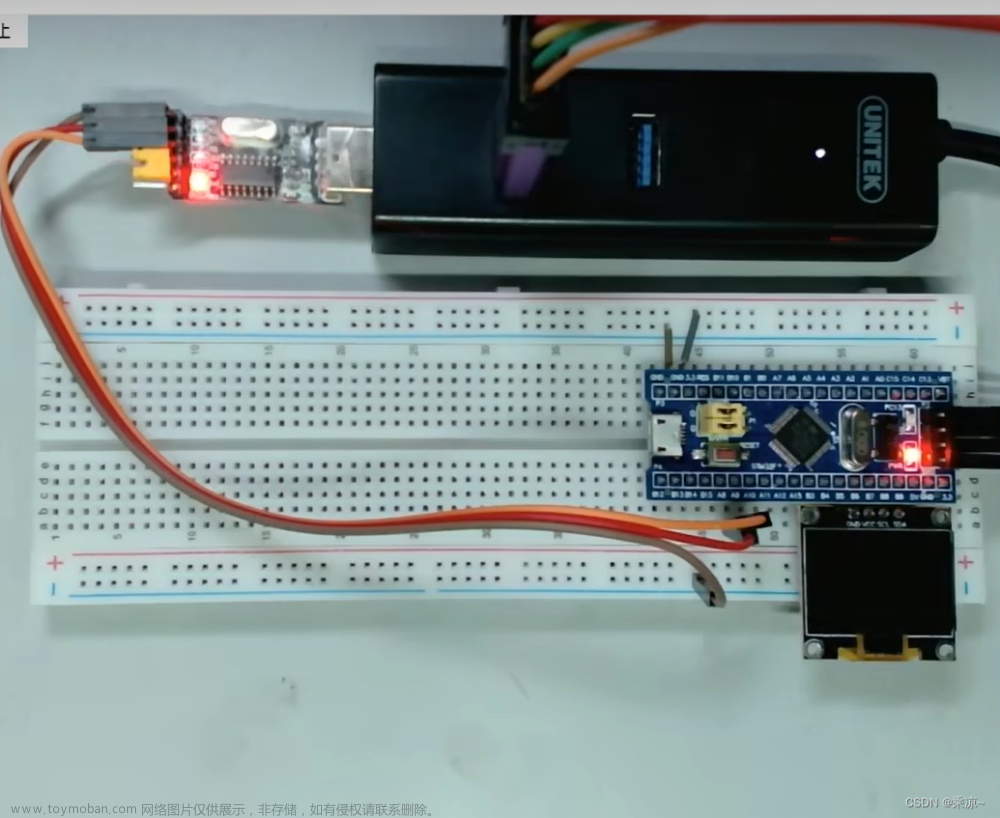
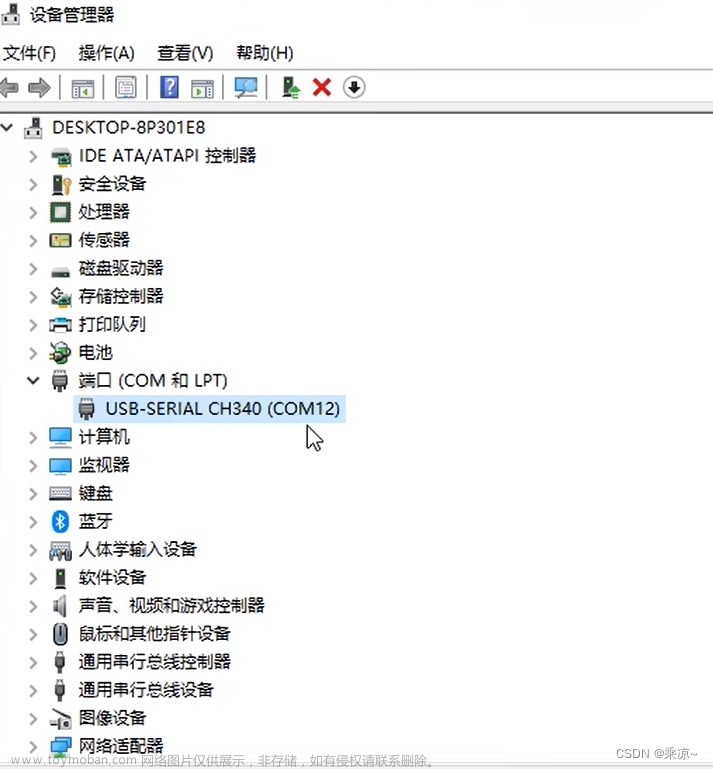
然后打开电脑设备管理器,确认串口端口正常链接没问题:
2.2 源码
STM32入门教程资料\程序源码\STM32Project\9-2 串口发送+接收\UserSTM32入门教程资料\程序源码\STM32Project\9-2 串口发送+接收\HardwareSTM32入门教程资料\程序源码\STM32Project\9-2 串口发送+接收\System
2.2.1 代码思路
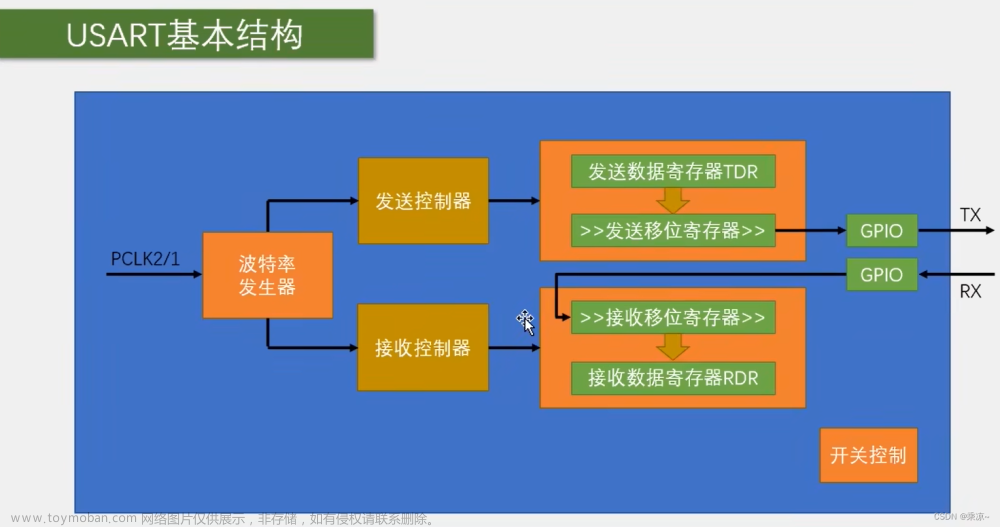
整个代码的流程参考以上结构图:
- 第一步,开启时钟;把需要用到的USART和GPIO的时钟打开;
- 第二步,GPIO初始化,把TX配置成复用输出,RX配置成复用输入;
- 第三步,配置USART,直接使用一个结构体,就可以把以上框图中所有参数配置好;
- 第四步,如果只需要发送功能,就直接开启USART,初始化就结束了;如果需要接收功能,那可能还需要配置中断;那就在开启USART之前,再加上ITConfig和NVIC的代码;
- 初始化完成后,如果要发送数据,就调用发送函数;如果如果要接收数据,就调用就收的函数;如果要获取发送和接收的状态,就调用获取标志位的函数;
2.2.2 具体代码及解释
这里的代码注释我仅注释了相较于上一小节多出的部分,即接收的部分;
至于关于发送部分的注释,可以参考上一小节(STM32单片机(九)USART串口----第三节:USART串口实战练习(串口发送)),注释比较完整,代码也差不多;文章来源:https://www.toymoban.com/news/detail-498661.html
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
uint8_t RxData;
int main(void)
{
OLED_Init();
OLED_ShowString(1, 1, "RxData:");
Serial_Init();
while (1)
{
if (Serial_GetRxFlag() == 1)//使用查询的方式读取收到的数据,即该标志位置1说明有收到数据
{
RxData = Serial_GetRxData();
Serial_SendByte(RxData);
OLED_ShowHexNum(1, 8, RxData, 2);
}
}
}
Serial.c:文章来源地址https://www.toymoban.com/news/detail-498661.html
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
uint8_t Serial_RxData;
uint8_t Serial_RxFlag;
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//模式为上拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;//设置Pin_10口,接收口
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;//模式设置为发送和接收
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
}
void Serial_SendByte(uint8_t Byte)
{
USART_SendData(USART1, Byte);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
void Serial_SendArray(uint8_t *Array, uint16_t Length)
{
uint16_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Array[i]);
}
}
void Serial_SendString(char *String)
{
uint8_t i;
for (i = 0; String[i] != '\0'; i ++)
{
Serial_SendByte(String[i]);
}
}
uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{
uint32_t Result = 1;
while (Y --)
{
Result *= X;
}
return Result;
}
void Serial_SendNumber(uint32_t Number, uint8_t Length)
{
uint8_t i;
for (i = 0; i < Length; i ++)
{
Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');
}
}
int fputc(int ch, FILE *f)
{
Serial_SendByte(ch);
return ch;
}
void Serial_Printf(char *format, ...)
{
char String[100];
va_list arg;
va_start(arg, format);
vsprintf(String, format, arg);
va_end(arg);
Serial_SendString(String);
}
uint8_t Serial_GetRxFlag(void)
{
if (Serial_RxFlag == 1)
{
Serial_RxFlag = 0;
return 1;
}
return 0;
}
uint8_t Serial_GetRxData(void)
{
return Serial_RxData;
}
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
Serial_RxData = USART_ReceiveData(USART1);
Serial_RxFlag = 1;
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
到了这里,关于STM32单片机(九)USART串口----第四节:USART串口实战练习(串口发送+接收)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!