前言
以往我们看到很多学习单片机知识的教程往往是从单片机内部资源出发,这样的教程原理往往晦涩难懂,初学者很难系统的学习开发单片机的项目。
而本次教程是从项目出发教你学习循迹小车的制作,整个项目采用 STM32 单片机作为控制器来实现,所以在学习前需要大家有一定的 C 语言基础和单片机基础。
从项目出发,本教程会更多的注重项目实现这个思路。所以关于单片机配置的细节方面可能讲解的不是特别详细。详细的配置大家可以查看往期的博客教程HAL库STM32CubeMx系列学习教程。大家也可以在网上查找资料,现在网上学习单片机的资料很多,大家应该会很轻松的就可以查到。
当然在实现项目的同时,本教程也会逐步深入的介绍 STM32 单片机内部资源的使用,直接学的话我们可能把单片机的某个知识点学会了,但是却不知道如何运用。从实战中学习有时候会比直接学习单片机效果更好。因此,本教程更注重于在实践中培养兴趣,使大家更快的接触到单片机项目的开发。
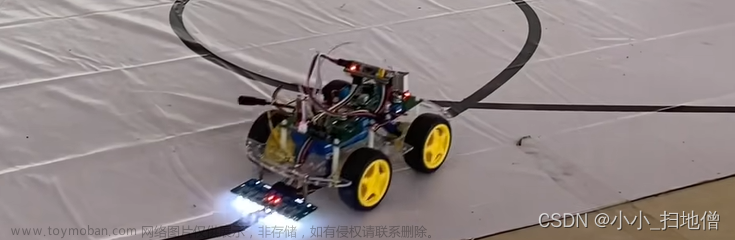
循迹小车介绍
循迹小车是基于自动引导机器人系统,用以实现小车自动识别路线,以及选择正确的路线。智能循迹小车是一个运用传感器、单片机、电机驱动及自动控制等技术来实现按照预先设定的模式下,不受人为管理时能够自动实现循迹导航的高新科技。对于初学者来讲,循迹小车是很适合新手实践的STM32项目,在目前众多的电子竞赛,如电子设计竞赛、工程训练赛、智能竞赛中均会出现循迹小车或与小车相关的比赛。循迹小车一般包含车体结构设计,驱动电路设计,程序设计三个部分。
本次循迹小车系列教程将会分别从软件、硬件展开,由浅入深的讲解循迹小车的制作。
STM32循迹小车系列教程(一)—— PWM控制电机
STM32循迹小车系列教程(二)—— 使用编码器获取小车速度
STM32循迹小车系列教程(三)—— 使用灰度传感器循迹
STM32循迹小车系列教程(四)—— 使用OpenMV循迹文章来源:https://www.toymoban.com/news/detail-500174.html
各章节部分代码均已开源,后续更新敬请期待!文章来源地址https://www.toymoban.com/news/detail-500174.html
到了这里,关于STM32实战项目系列教程 (一)—— 循迹小车的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!