三相异步电动机的调速方法有多种,其中较为常用的调速手段为调压调速。 本文在现有理论的基础上,在Matlab 中运用Simulink 模型库中的电路、电子、电机、电力电子等模块库,以转速单闭环调压调速系统为例,进了行仿真实验,直观地观察不同的控制方式下对系统的控制。
1 三相异步电动机的调速方法
根据异步电机转速公式:
若要改变三相异步电动机的转速, 可以通过控制定子电源相电压, 调节定子电源频率, 或者是改变异步电动机的极对数三种方法。 无论采用三种方法中的哪一种都有其优缺点, 本文主要对调压调速加以研究。
2 调压调速的原理
根据异步电动机的机械特性方程:
异步电机的调速控制本质上是调控电机的转矩,对于异步电机来说, 其作为电机使用时通过电磁转矩
拖动负载, 不同的负载对应的电机转速也不同, 这是异步电机的主要稳态特性。 而通过各种调节方式,包括: 改变定子电压、 频率等可以得到相应条件下的电机机械特性。
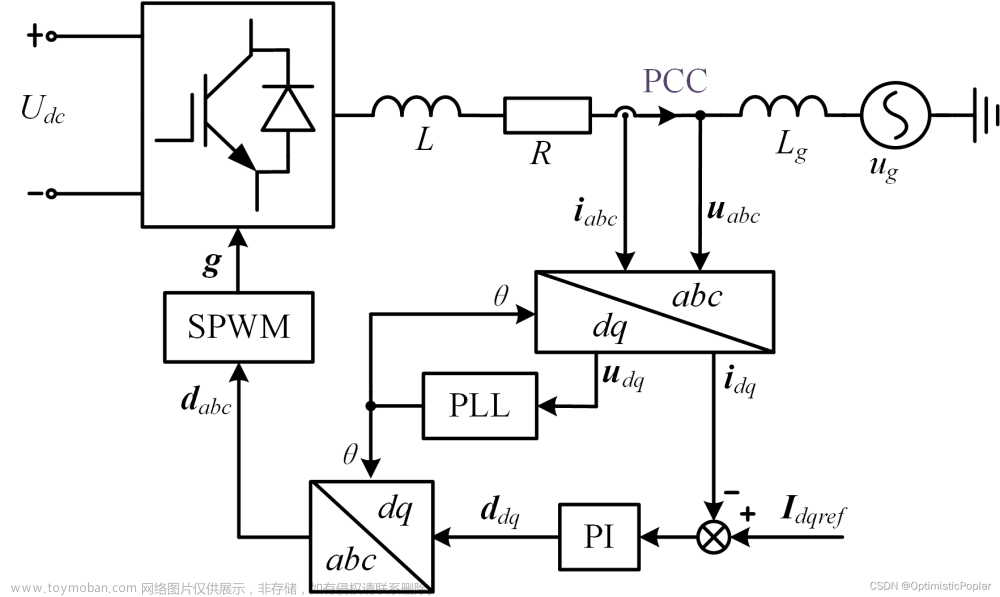
3 转速反馈系统的设计
三相异步电机通过调压进行调速的调控范围很窄。 对于要求调速范围要求较大的恒转矩负载, 可以
采用转速反馈的闭环控制系统。 通过速度给定值与速度反馈值进行比较,经ASR 得到控制电机,控制导通角调节输出电压, 进而改变定子绕组电压, 实现调速目的。

转速反馈调速系统结构图
转速反馈调速系统电路原理图如图3 所示, 当负载增大时→转速n 下降→电压Un 下降→△U=U*n -Un,因此△U 增大→经过ASR 调节晶闸管导通角→调高定子电压→转速回升,PID Controller 采用PI 调节能够实现无静差控制的效果。

转速反馈调速系统电路原理图
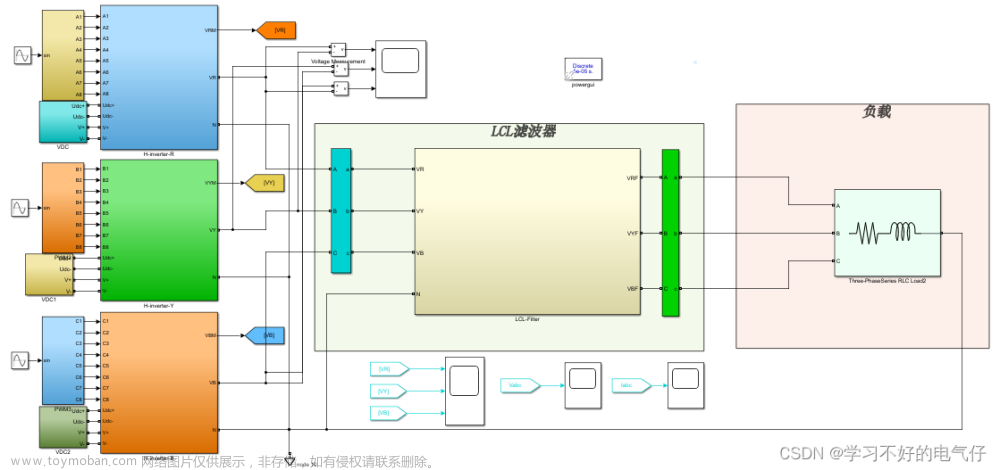
4 交流调压调速Simulink 仿真
创建交流电动机调压调速Simulink 仿真模型,使用示波器查看输出转速和电磁转矩波形。 系统的主要组成主要由三相对称电压源、 三相调压器、 同步六脉冲触发器、交流异步电动机、ASR、速度反馈等部分组成。
4.1 仿真模型的建立和参数设置
三相调压器由6 个晶闸管组成,为了简化模型结构,仿真模型如图所示,经多次实践后设置合适的
仿真算法和仿真时间,启动仿真,在示波器中观察并分析得到的波形。

总体仿真图
调压器(tiaoyaqi)

六相脉冲设计

转速和转矩波形文章来源:https://www.toymoban.com/news/detail-500730.html
参考文献:黄旭,王康,任俊.三相异步电动机交流调压调速的研究[J].科技视界,2018(04):135-136.文章来源地址https://www.toymoban.com/news/detail-500730.html
到了这里,关于三相异步电动机交流调压调速的仿真研究的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!