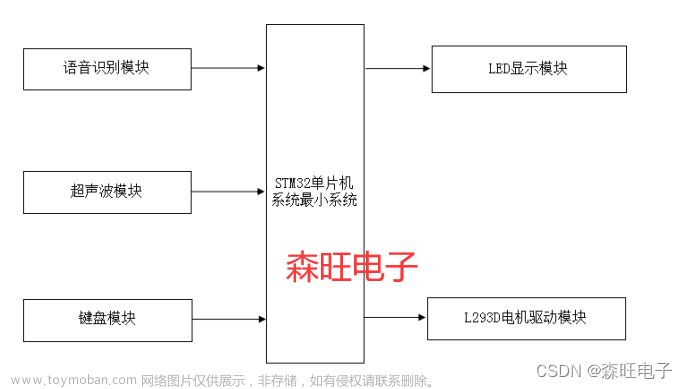
实现的功能:
a.小车运动:小车的前进,后退,左转,右转,停止。
b.蓝牙控制:手机通过蓝牙向开发板发送运动指令,驱动小车进行相应的运动。
c.自动循迹:小车通过红外探测灯来检测地面的反射光,控制方向,沿着轨迹行驶。
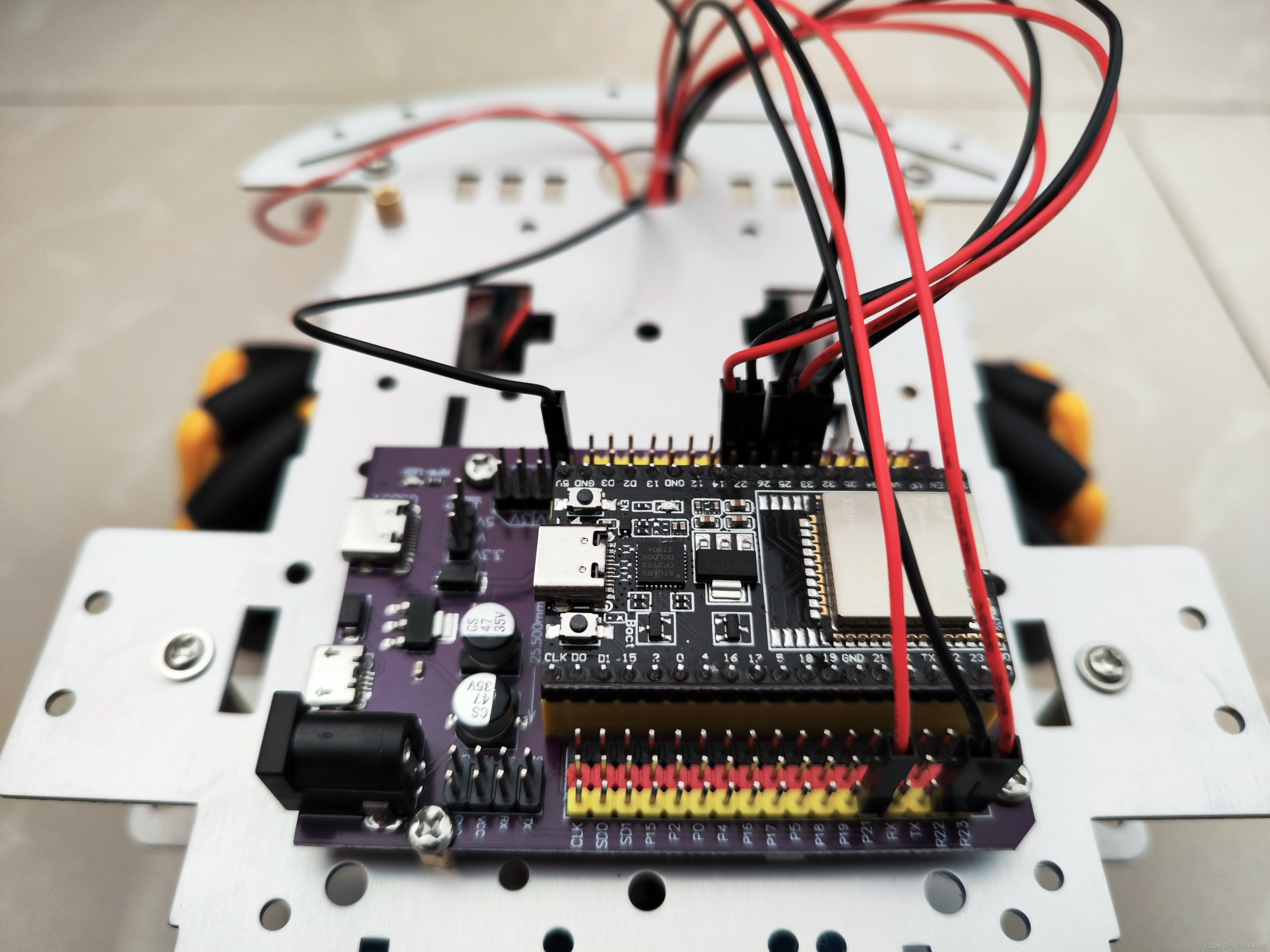
小车的配置:

蓝牙配置:

注意:蓝牙TX-----开发板usart 3-RX ,蓝牙RX-----开发板usart 3-TX
红外调试:
白色地面---低电平---0--亮
黑色地面---高电平---1--不亮
D1------Right------PB6
D4-------Left-------PB7
项目结构:

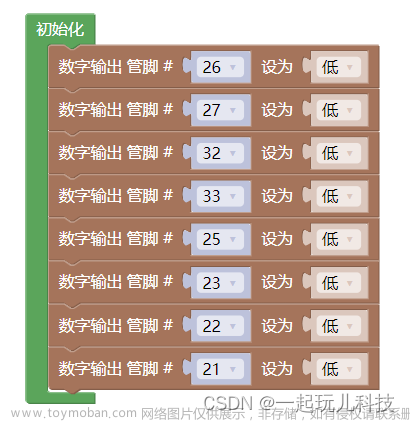
部分代码实现:



问题与解决方案:
1.代码无误的情况下,小车的左右轮不转。------- 使用的电压较小,之后换成了5v的电压。
2.更换电压后,小车的左轮依旧不转。 --------发现左部的马达突出,将马达推进,带动齿轮旋转。
3.先前调整好的红外探测灯,一段时间后不灵敏。 --------光线与位置的变化会影响红外探测灯。
4.小车前进过程中,左右轮速度不一样,导致无法直行。 -------小车速度太快,导致红外探测灯不能
5.及时探测,使得小车偏离轨道。 使用延时来调整小车的运行速度。------使用延时来降低某一边轮子的速度。
6.蓝牙控制小车存在一定的问题,主要表现为蓝牙连接不稳定 -------拔掉电源,重新连接。
学习心得:
学习原理与实践:在实验中,我们重点学习了 STM32 单片机的智能小车项目的设计原理和方法,还学习了如何通过单片机控制电机、传感器等硬件设备,从而实现小车的运动、蓝牙控制和红外自动循迹等功能。文章来源:https://www.toymoban.com/news/detail-500778.html
联想现实中的创新:这不仅是一次实践性的学习,更是帮助我们深入了解单片机在智能控制方面的应用。例如,我们可以将智能小车应用于物流和配送领域,实现自动路径规划和货物装卸等功能;还可以将智能小车与人工智能、机器人等技术相结合,实现更加智能化的控制和应用。文章来源地址https://www.toymoban.com/news/detail-500778.html
到了这里,关于STM32智能小车项目的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!