leetcode63. 不同路径 II
来源:力扣(LeetCode)
链接:https://leetcode.cn/problems/unique-paths-ii
题目描述
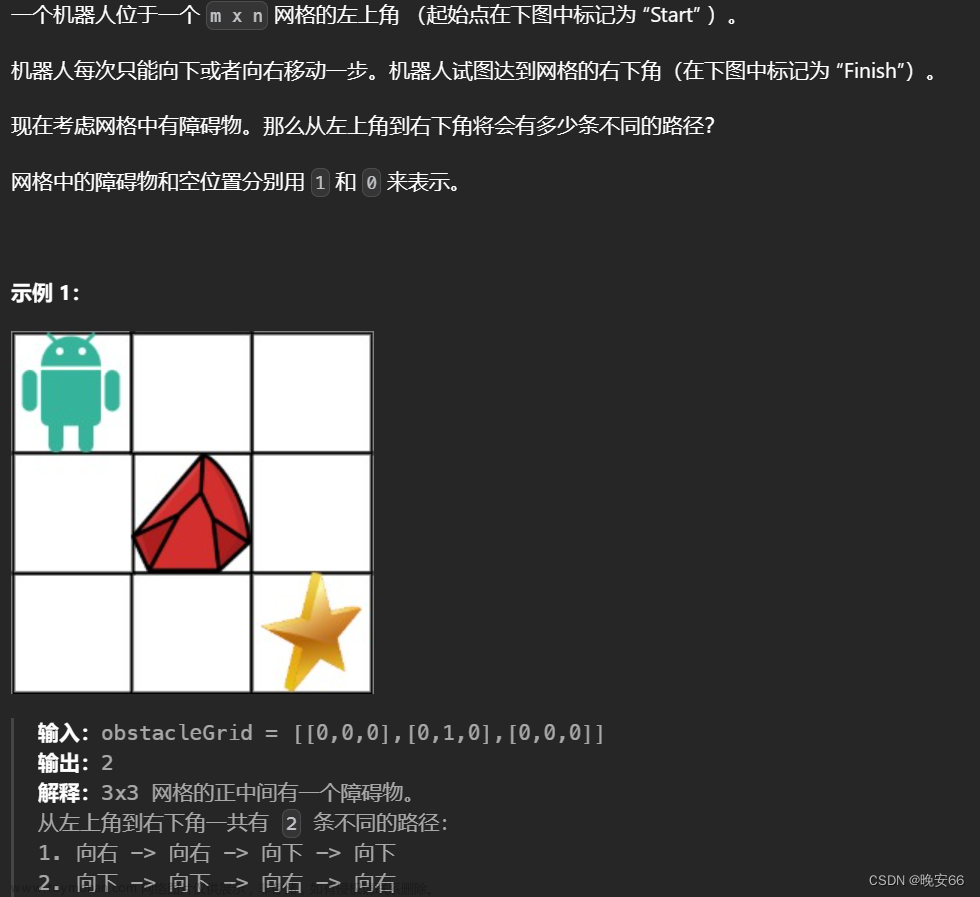
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
示例1:
输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
输出:2
解释:3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
- 向右 -> 向右 -> 向下 -> 向下
- 向下 -> 向下 -> 向右 -> 向右

示例2:
输入:obstacleGrid = [[0,1],[0,0]]
输出:1

提示:
m == obstacleGrid.length
n == obstacleGrid[i].length
1 <= m, n <= 100
obstacleGrid[i][j] 为 0 或 1
暴力递归
这题是leetcode62. 不同路径 的拓展版.加了障碍物,解题思路是一样的,只是要加下障碍物的判断.
还是向下和向右两个方向的选择,两种情况的和就是所有的路线数.
代码演示
/**
* 主方法
*/
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
//如果右下角是障碍物,怎么都过不去,直接返回0
if(obstacleGrid[obstacleGrid.length - 1][obstacleGrid[0].length - 1] == 1){
return 0;
}
//开始递归
return process(obstacleGrid,0,0);
}
/**
* 暴力递归
* i 和 j 描述当前在的位置
*/
public int process(int[][]obstacleGrid,int i,int j){
//base case 来到最后一个位置,前面路线有效,返回1
if(i == obstacleGrid.length - 1 && j == obstacleGrid[0].length - 1 ){
return 1;
}
//越界,路线无效 返回0
if(i >= obstacleGrid.length || j >= obstacleGrid[0].length){
return 0;
}
// 碰到障碍物,无效返回0
if(obstacleGrid[i][j] == 1){
return 0;
}
//x向下和向右两种情况
int down = process(obstacleGrid,i + 1,j);
int right = process(obstacleGrid,i,j + 1);
//两种情况累加就是所有的路线
return down + right;
}
动态规划
从暴力递归中可以得知,(i,j) 位置依赖 (i+1,j)和(i,j+1)两个位置,所以可以轻松得到状态转移方程是:
f(i,j) = f(i+1,j) + f(i,j+1;
但这里有一些需要注意的地方,就是障碍物的处理,和dp表的初始化,我们以图为例:
上面图代表要走的网格,我只填写了最后一行和一列其他位置没有标注,因为现在只讨论最后一行和一列的情况.
最后一行为例,三角符号标注的位置是最后一次出现的障碍物,在这个障碍物之前的最后一行位置,都无法到最后位置了,所以之前的位置在dp 表中要初始化为0,之后的可以初始化为1,
最后一列也是同样情况:
下面看下代码中如何处理;

代码演示
/**
* 动态规划
* @param obstacleGrid
* @return
*/
public int uniquePathsWithObstacles(int[][] obstacleGrid) {
int n = obstacleGrid.length;
int m = obstacleGrid[0].length;
//最有下角如果是障碍物,就无法过去,返回 0
if (obstacleGrid[n - 1][m - 1] == 1) {
return 0;
}
//动态规划表
int[][]dp = new int[n][m];
//来标记最后一行最后一次出现障碍物的位置
int flagN = -1;
//来标记最后一列最后一次出现障碍物的位置
int flagM = -1;
for (int i = m - 1; i >= 0;i--){
if(obstacleGrid[n - 1][i] == 1){
flagN = i;
break;
}
}
//最后一个障碍物之后的位置初始化为1
for (int i = flagN + 1; i < m;i++){
dp[n - 1][i] = 1;
}
//标记最后一列最后一次出现障碍物的位置.
for (int j = n - 1; j >= 0;j--){
if(obstacleGrid[j][m - 1] == 1){
flagM = j;
break;
}
}
//最后一个障碍物之后的位置初始化为1
for (int j = flagM + 1; j < n;j++){
dp[j][m - 1] = 1;
}
for (int i = n - 2;i >= 0;i--){
for (int j = m - 2;j >= 0;j--){
//当前位置本身是障碍物 即为0
if(obstacleGrid[i][j] == 1){
dp[i][j] = 0;
}else{
//z状态转移方程
dp[i][j] = dp[i + 1][j] + dp[i][j + 1];
}
}
}
return dp[0][0];
}
动态规划空间压缩
/**
* 动态规划 + 空间压缩
* @param obstacleGrid
* @return
*/
public int uniquePathsWithObstacles2(int[][] obstacleGrid) {
int n = obstacleGrid.length;
int m = obstacleGrid[0].length;
if (obstacleGrid[n - 1][m - 1] == 1) {
return 0;
}
int[]dp = new int[m];
int flagN = -1;
for (int i = m - 1; i >= 0;i--){
if(obstacleGrid[n - 1][i] == 1){
flagN = i;
break;
}
}
for (int i = flagN + 1; i < m;i++){
dp[i] = 1;
}
int flagM = -1;
for (int j = n - 1; j >= 0;j--){
if(obstacleGrid[j][m - 1] == 1){
flagM = j;
break;
}
}
for (int i = n - 2;i >= 0;i--){
dp[m - 1] = i > flagM ? 1 : 0;
for (int j = m - 2;j >= 0;j--){
if(obstacleGrid[i][j] == 1){
dp[j] = 0;
}else{
dp[j] = dp[j] + dp[j + 1];
}
}
}
return dp[0];
}
动态规划专题
leetcode62. 不同路径
leetcode877. 石子游戏
leetcode64. 最小路径和
leetcode416. 分割等和子集
leetcode354. 俄罗斯套娃信封问题
leetcode300. 最长递增子序列文章来源:https://www.toymoban.com/news/detail-503367.html
leetcode337. 打家劫舍 III文章来源地址https://www.toymoban.com/news/detail-503367.html
到了这里,关于leetcode63. 不同路径 II(动态规划-java)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!