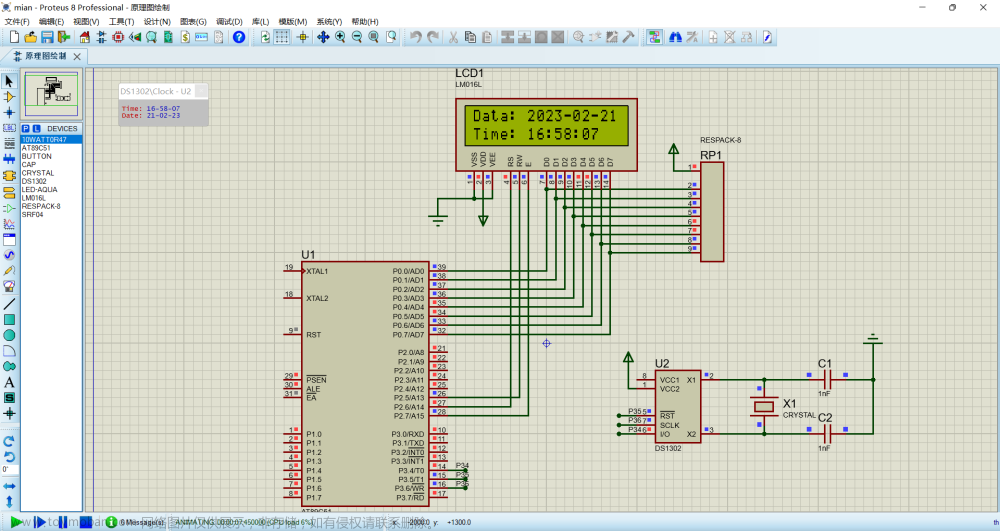
Proteus 实现:
1. 主要器件:
C51单片机、8位LED数码管(共阴极)…
2. 仿真图如下:

3. 主要特点1. 24进制显示2. 最下方三个按钮分别控制时、分、秒
proteus 实现代码:
#include <reg51.h>
#include <intrins.h>
void Delayms(unsigned int xms){
unsigned char i,j;
while(xms--){
i=2;
j=239;
do{
while(--j);
}
while(--i);
}
}
char led_mod[] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f};
unsigned char net = 0;//按键
unsigned char count = 0;
unsigned char time[] = {23, 58, 50};//默认数值
unsigned char timp = 0xc0;
sbit tt = P3^2;
sbit mm = P3^3;
sbit ss = P3^4;
void disp(){//数码管显示
P2 = 0x7f;
P0 = led_mod[time[2] % 10];
Delayms(3);
P2 = _cror_(P2, 1);
P0 = led_mod[time[2] / 10];
Delayms(3);
P2 = P2 = _cror_(P2, 1);
P0 = timp;
Delayms(3);
P2 = _cror_(P2, 1);
P0 = led_mod[time[1] % 10];
Delayms(3);
P2 = _cror_(P2, 1);
P0 = led_mod[time[1] / 10];
Delayms(3);
P2 = P2 = _cror_(P2, 1);
P0 = timp;
Delayms(3);
P2 = _cror_(P2, 1);
P0 = led_mod[time[0] % 10];
Delayms(3);
P2 = _cror_(P2, 1);
P0 = led_mod[time[0] / 10];
Delayms(3);
}
timer1() interrupt 3{//中断方式1
TH1 = 0x3C;
TL1 = 0xB0;
count = count + 1;
if(count == 20){
count = 0;
time[2] = time[2] + 1;
if(time[2] >= 60){
time[2] = 0;
time[1] = time[1] + 1;
if(time[1] >= 60){
time[1] = 0;
time[0] = time[0] + 1;
if(time[0] >= 24){
time[0] = 0;
}
}
}
}
}
void key(){//按键
net = net + 1;
if(net == 6){
net = 0;
if(tt == 0){
time[0] = time[0] + 1;
if(time[0] >= 24){
time[0] = 0;
}
Delayms(10);
}
if(mm == 0){
time[1] = time[1] + 1;
if(time[1] >= 60){
time[1] = 0;
}
Delayms(10);
}
if(ss == 0){
time[2] = 0;
Delayms(10);
}
tt = 1;
mm = 1;
ss = 1;
}
}
int main(){//主函数
TMOD = 0x10;
TH1 = 0x3C;
TL1 = 0xB0;
EA = 1;
ET1 = 1;
TR1 = 1;
while(1){
disp();//显示
if(tt == 0 || mm == 0 || ss == 0){
Delayms(10);
key();
}
}
}
上述代码包含的主要内容:1. T1定时方式1,用到T1中断函数2. 每50ms溢出一次,一共20次为 1s 记一次数3. 按键知识,消抖动...4. 移位知识,_crol_() 左移,_cror_() 右移
上述知识点都是课本知识,理解之后,看懂上述代码完全没有问题。文章来源:https://www.toymoban.com/news/detail-503702.html
实验板 实现代码:
#include <reg51.h>
#include <intrins.h>
void Delayms(unsigned int xms){
unsigned char i,j;
while(xms--){
i=2;
j=239;
do{
while(--j);
}
while(--i);
}
}
char led_mod[] = {0x3f, 0x06, 0x5b, 0x4f, 0x66, 0x6d, 0x7d, 0x07, 0x7f, 0x6f};
unsigned char net = 0;//按键
unsigned char count = 0;
unsigned char time[] = {23, 58, 50};//默认数值
unsigned char timp = 0xc0;
sbit tt = P2^2;
sbit mm = P2^3;
sbit ss = P2^4;
void disp(){//数码管显示
tt = 0;
mm = 0;
ss = 0;
P0 = led_mod[time[2] % 10];
Delayms(3);
tt = 1;
mm = 0;
ss = 0;
P0 = led_mod[time[2] / 10];
Delayms(3);
tt = 0;
mm = 1;
ss = 0;
P0 = timp;
Delayms(3);
tt = 1;
mm = 1;
ss = 0;
P0 = led_mod[time[1] % 10];
Delayms(3);
tt = 0;
mm = 0;
ss = 1;
P0 = led_mod[time[1] / 10];
Delayms(3);
tt = 1;
mm = 0;
ss = 1;
P0 = timp;
Delayms(3);
tt = 0;
mm = 1;
ss = 1;
P0 = led_mod[time[0] % 10];
Delayms(3);
tt = 1;
mm = 1;
ss = 1;
P0 = led_mod[time[0] / 10];
Delayms(3);
}
timer1() interrupt 3{//中断方式1
TH1 = 0x3C;
TL1 = 0xB0;
count = count + 1;
if(count == 20){
count = 0;
time[2] = time[2] + 1;
if(time[2] >= 60){
time[2] = 0;
time[1] = time[1] + 1;
if(time[1] >= 60){
time[1] = 0;
time[0] = time[0] + 1;
if(time[0] >= 24){
time[0] = 0;
}
}
}
}
}
int main(){//主函数
TMOD = 0x10;
TH1 = 0x3C;
TL1 = 0xB0;
EA = 1;
ET1 = 1;
TR1 = 1;
while(1){
disp();//显示
}
}
为了切合实验板,对仿真代码做了一些调整。因为嫌麻烦,所以删去了按键功能,本代码在实验板上只能显示时间,不能利用按键改时间。初始值为23:58:50文章来源地址https://www.toymoban.com/news/detail-503702.html
到了这里,关于单片机课设 - 电子时钟 (仿真,仿真代码,实验板代码)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!