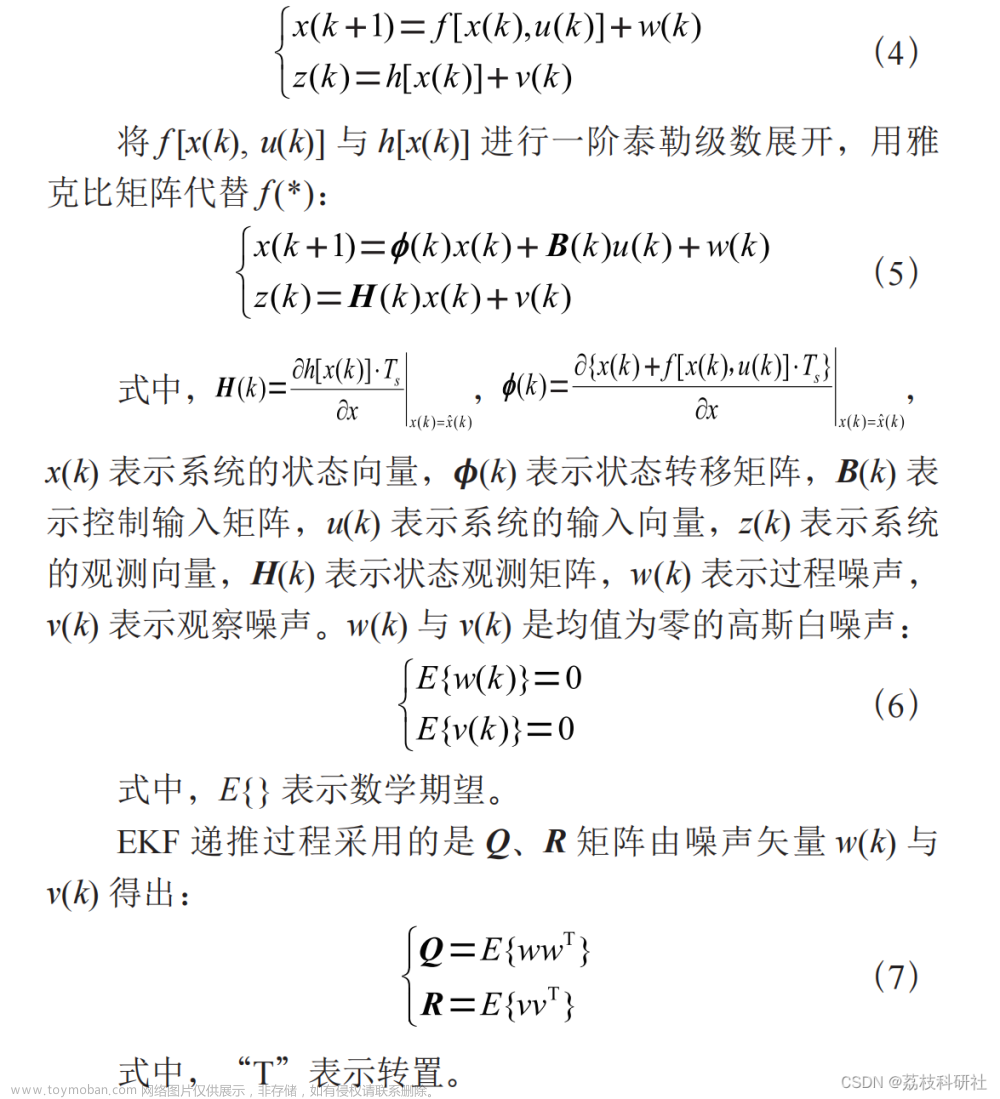
参考文献《Recursive Noise Adaptive Kalman Filtering by Variational Bayesian Approximations》中的算法,用matlab编写了一个小程序测试了一下(demo版本)。程序是按照文章中的内容实现的。
下面是主程序:
clear all;
close all;
%%%%%Model parameters%%%%%%%
nxp = 10;
nx = 4; % number of state variables
nz = 2; % number of measures
T = 1;
q = 1;
r = 1;
F = [eye(2) T*eye(2);zeros(2) eye(2)];
H = [eye(2) zeros(2)];
Q0 = q * [T^3/3*eye(2) T^2/2*eye(2);T^2/2*eye(2) T*eye(2)];
R0 = r * [1 0.5;0.5 1];
L = 1000;
Tn = L;
N = 5; %%%%%%The number of variational iteration
times_Of_R = 5;
%%%%%Initial values
x_Ini = [100;100;10;10];
P_Ini = diag([100 100 100 100]);
X = zeros(4,L);
XKF_True = zeros(4,L);
XKF_Const = zeros(4,L);
XKF_VB = zeros(4,L);
mse_Kf_1 = zeros(L,nxp);
mse_Kf_2 = zeros(L,nxp);
mse_Ktf_1 = zeros(L,nxp);
mse_Ktf_2 = zeros(L,nxp);
mse_VB_1 = zeros(L,nxp);
mse_VB_2 = zeros(L,nxp);
for k = 1:nxp
x=x_Ini;
X(:,1) = x;
%%%%Kalman filter with nominal noise covariance matrices (KFNCM)
XKF_Const(:,1) = x;
x1=x;
P_Const = P_Ini;
%%%%Kalman filter with true noise covariance matrices (KFTCM)
XKF_True(:,1) = x;
x2 = x;
P_True = P_Ini;
%%%%Kalman filter of variational Bayesian Approximations
XKF_VB(:,1) = x;
x3 = x;
P_VB = P_Ini;
alfa = [1 1]';
beta = diag(R0);
mk = x;
for t = 2:Tn
%%%%True noise covariance matrices
Q = (1+0.5*cos(pi*t/Tn))*Q0;
R = (1+0.6*cos(pi*t/Tn))*R0;
%%%%Square-root of noise covariance matrices
SQ = utchol(Q);
SR = utchol(R);
%%%%Simulate true state and measurement
x = F*x+SQ*randn(nx,1);
z = H*x+SR*randn(nz,1);
X(:,t) = x;
%%%%Filtering
[x1,P_Const,Ppf] = kf(x1,P_Const,F,H,z,Q0,R0*times_Of_R);
[x2,P_True,Pptf] = kf(x2,P_True,F,H,z,Q,R);
[x3,P_VB,alfa,beta,mk] = vbkf(x3,P_VB,alfa,beta,mk,F,H,z,Q0,N);
%%%%Save data
XKF_Const(:,t) = x1;
XKF_True(:,t) = x2;
XKF_VB(:,t) = x3;
end
%%%%MSE calculation
mse_Kf_1(:,k) = (X(1,:)-XKF_Const(1,:)).^2+(X(2,:)-XKF_Const(2,:)).^2;
mse_Kf_2(:,k) = (X(3,:)-XKF_Const(3,:)).^2+(X(4,:)-XKF_Const(4,:)).^2;
mse_Ktf_1(:,k) = (X(1,:)-XKF_True(1,:)).^2+(X(2,:)-XKF_True(2,:)).^2;
mse_Ktf_2(:,k) = (X(3,:)-XKF_True(3,:)).^2+(X(4,:)-XKF_True(4,:)).^2;
mse_VB_1(:,k) = (X(1,:)-XKF_VB(1,:)).^2+(X(2,:)-XKF_VB(2,:)).^2;
mse_VB_2(:,k) = (X(3,:)-XKF_VB(3,:)).^2+(X(4,:)-XKF_VB(4,:)).^2;
end
%%%%%%%%%RMSE calculation
rmse_Kf_1 = sqrt(mean(mse_Kf_1,2));
rmse_Kf_2 = sqrt(mean(mse_Kf_2,2));
rmse_Ktf_1 = sqrt(mean(mse_Ktf_1,2));
rmse_Ktf_2 = sqrt(mean(mse_Ktf_2,2));
rmse_VB_1 = sqrt(mean(mse_VB_1,2));
rmse_VB_2 = sqrt(mean(mse_VB_2,2));
%%%%%%%RMSE curves
figure;
j = 2:L;
subplot(2,1,1)
plot(j*T,rmse_Kf_1(2:end),'-b',j*T,rmse_Ktf_1(2:end),'-g',j*T,rmse_VB_1(2:end),'--r','linewidth',2);
ylabel('RMSE_{pos} (m)');
subplot(2,1,2)
plot(j*T,rmse_Kf_2(2:end),'-b',j*T,rmse_Ktf_2(2:end),'-g',j*T,rmse_VB_2(2:end),'--r','linewidth',2);
xlabel('Time (s)');
ylabel('RMSE_{vel} (m/s)');
legend('KF1','KF2','The VBKF');
下面是调用到的几个函数:
函数一(cholesky分解,引用了其它的程序):
function C = utchol(P)
%
%
% M. S. Grewal & A. P. Andrews
% Kalman Filtering Theory and Practice Using MATLAB
% Third Edition, Wiley & Sons, 2008
%
% for P symmetric and positive definite,
% computes upper triangular C such that
% C*C' = P
%
[n,m] = size(P);
if (n-m) error('non-square argument'); end;
for j=m:-1:1,
for i=j:-1:1,
sigma = P(i,j);
for k=j+1:m,
sigma = sigma - C(i,k)*C(j,k);
end;
C(j,i) = 0;
if (i==j)
C(i,j) = sqrt(max([0,sigma]));
elseif (C(j,j) == 0)
C(i,j) = 0;
else
C(i,j) = sigma/C(j,j);
end;
end;
end;
函数二(标准卡尔曼滤波):
% This program impliment the standard kalman filter
function [x,P,P_Pre]=kf(x,P,F,H,z,Q,R)
x_Pre=F*x;
P_Pre=F*P*F'+Q;
S=H*P_Pre*H'+R;
K=P_Pre*H'*pinv(S);
x=x_Pre+K*(z-H*x_Pre);
P=P_Pre-K*S*K';
函数三:文章来源:https://www.toymoban.com/news/detail-504805.html
% This program give an implication of the algorithms in the article
% <Recursive Noise Adaptive Kalman Filtering by Variational Bayesian Approximations>
function [x_VB,P,alfa,beta,mk,R_VB] = vbkf(x_VB,P,alfa,beta,mk,F,H,z,Q0,N)
% x_VB state variable
% P covariance matrix
rou = 0.99;
alfa = alfa+0.5;
alfa = rou*alfa;
beta = rou*beta;
betaBak = beta;
%%%%%Time update
x_Pre = F*x_VB;
P_pre = F*P*F'+Q0;
mk_Pre = F*mk;
for i = 1:N
R_VB = diag(beta./alfa);
mk = mk_Pre+P_pre*H'*pinv(H*P_pre*H'+R_VB)*(z-H*mk_Pre);
P = P_pre-P_pre*H'*pinv(H*P_pre*H'+R_VB)*H*P_pre;
beta = betaBak+1/2*(z-H*mk).^2+1/2*diag(H*P*H');
end
K = P_pre*H'*pinv(H*P_pre*H'+R_VB);
x_VB = x_Pre+K*(z-H*x_Pre);
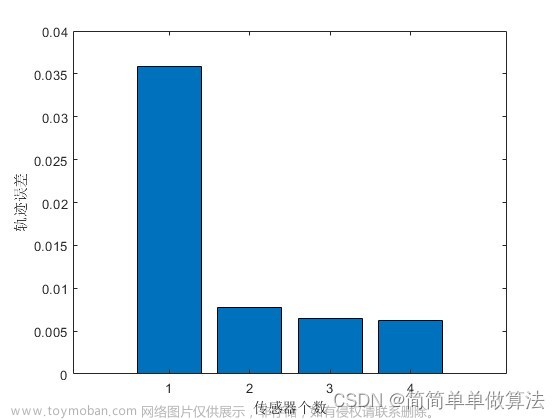
下面是一个效果图:
注1:demo版;mathworks同时也上传了一份。
注2:网址Matlab code for the paper "A Novel Robust Student’s t-Based Kalman Filter"有程序,效果非常不错。文章来源地址https://www.toymoban.com/news/detail-504805.html
到了这里,关于基于变分贝叶斯的自适应卡尔曼滤波(matlab)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!