代码解读都写在注释了
目录
sam.py
image_encoder.py
重点(Calculate decomposed Relative Positional Embeddings)文章来源:https://www.toymoban.com/news/detail-507116.html
GitHub 官方代码文章来源地址https://www.toymoban.com/news/detail-507116.html
sam.py
# Copyright (c) Meta Platforms, Inc. and affiliates.
# All rights reserved.
# This source code is licensed under the license found in the
# LICENSE file in the root directory of this source tree.
import torch
from torch import nn
from torch.nn import functional as F
from typing import Any, Dict, List, Tuple
from .image_encoder import ImageEncoderViT
from .mask_decoder import MaskDecoder
from .prompt_encoder import PromptEncoder
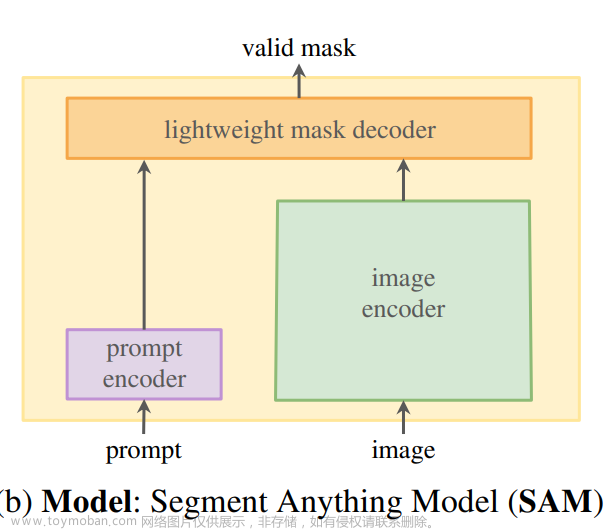
class Sam(nn.Module):
mask_threshold: float = 0.0
image_format: str = "RGB"
def __init__(
self,
image_encoder: ImageEncoderViT,
prompt_encoder: PromptEncoder,
mask_decoder: MaskDecoder,
pixel_mean: List[float] = [123.675, 116.28, 103.53],
pixel_std: List[float] = [58.395, 57.12, 57.375],
) -> None:
"""
SAM predicts object masks from an image and input prompts.
Arguments:
image_encoder (ImageEncoderViT): The backbone used to encode the
image into image embeddings that allow for efficient mask prediction.
prompt_encoder (PromptEncoder): Encodes various types of input prompts.
mask_decoder (MaskDecoder): Predicts masks from the image embeddings
and encoded prompts.
pixel_mean (list(float)): Mean values for normalizing pixels in the input image.
pixel_std (list(float)): Std values for normalizing pixels in the input image.
"""
super().__init__()
self.image_encoder = image_encoder
self.prompt_encoder = prompt_encoder
self.mask_decoder = mask_decoder
self.register_buffer("pixel_mean",
torch.Tensor(pixel_mean).view(-1, 1, 1), False)
self.register_buffer("pixel_std",
torch.Tensor(pixel_std).view(-1, 1, 1), False)
@property
def device(self) -> Any:
return self.pixel_mean.device
@torch.no_grad()
def forward(
self,
batched_input: List[Dict[str, Any]],
multimask_output: bool,
) -> List[Dict[str, torch.Tensor]]:
"""
Predicts masks end-to-end from provided images and prompts.
If prompts are not known in advance, using SamPredictor is
recommended over calling the model directly.
Arguments:
batched_input (list(dict)): A list over input images, each a
dictionary with the following keys. A prompt key can be
excluded if it is not present.
'image': The image as a torch tensor in 3xHxW format,
already transformed for input to the model.
'original_size': (tuple(int, int)) The original size of
the image before transformation, as (H, W).
'point_coords': (torch.Tensor) Batched point prompts for
this image, with shape BxNx2. Already transformed to the
input frame of the model.
'point_labels': (torch.Tensor) Batched labels for point prompts,
with shape BxN.
'boxes': (torch.Tensor) Batched box inputs, with shape Bx4.
Already transformed to the input frame of the model.
'mask_inputs': (torch.Tensor) Batched mask inputs to the model,
in the form Bx1xHxW.
multimask_output (bool): Whether the model should predict multiple
disambiguating masks, or return a single mask.
Returns:
(list(dict)): A list over input images, where each element is
as dictionary with the following keys.
'masks': (torch.Tensor) Batched binary mask predictions,
with shape BxCxHxW, where B is the number of input prompts,
C is determined by multimask_output, and (H, W) is the
original size of the image.
'iou_predictions': (torch.Tensor) The model's predictions
of mask quality, in shape BxC.
'low_res_logits': (torch.Tensor) Low resolution logits with
shape BxCxHxW, where H=W=256. Can be passed as mask input
to subsequent iterations of prediction.
"""
# image 先处理
input_images = torch.stack(
[self.preprocess(x["image"]) for x in batched_input], dim=0)
# 获取image embedding
image_embeddings = self.image_encoder(input_images)
# 批处理图片
outputs = []
for image_record, curr_embedding in zip(batched_input,
image_embeddings):
# 提示:点坐标,鼠标点的位置,or设置一个点
if "point_coords" in image_record:
points = (image_record["point_coords"],
image_record["point_labels"])
else:
points = None
# 提示:boxes框选坐标,mask_inputs掩码提示
sparse_embeddings, dense_embeddings = self.prompt_encoder(
points=points,
boxes=image_record.get("boxes", None),
masks=image_record.get("mask_inputs", None),
)
# decoder 解码
low_res_masks, iou_predictions = self.mask_decoder(
image_embeddings=curr_embedding.unsqueeze(0),
image_pe=self.prompt_encoder.get_dense_pe(),
sparse_prompt_embeddings=sparse_embeddings,
dense_prompt_embeddings=dense_embeddings,
multimask_output=multimask_output,
)
# mask后处理
masks = self.postprocess_masks(
low_res_masks,
input_size=image_record["image"].shape[-2:],
original_size=image_record["original_size"],
)
masks = masks > self.mask_threshold # 这样处理的?!大于阈值的是前景否则是背景
# 输出 output
outputs.append({
"masks": masks,
"iou_predictions": iou_predictions,
"low_res_logits": low_res_masks,
})
return outputs
def postprocess_masks(
self,
masks: torch.Tensor,
input_size: Tuple[int, ...],
original_size: Tuple[int, ...],
) -> torch.Tensor:
"""
Remove padding and upscale masks to the original image size.
非常的巧妙的反向三步操作!!
Arguments:
masks (torch.Tensor): Batched masks from the mask_decoder,
in BxCxHxW format.
input_size (tuple(int, int)): The size of the image input to the
model, in (H, W) format. Used to remove padding.
original_size (tuple(int, int)): The original size of the image
before resizing for input to the model, in (H, W) format.
Returns:
(torch.Tensor): Batched masks in BxCxHxW format, where (H, W)
is given by original_size.
"""
# 调整到图像嵌入大小(模型处理过程中分辨率下降 /4?)
masks = F.interpolate(
masks,
(self.image_encoder.img_size, self.image_encoder.img_size),
mode="bilinear",
align_corners=False,
)
# 去掉零填充padding
masks = masks[..., :input_size[0], :input_size[1]]
# 之前进行了长边缩放, 反操作
masks = F.interpolate(masks,
original_size,
mode="bilinear",
align_corners=False)
return masks
def preprocess(self, x: torch.Tensor) -> torch.Tensor:
"""Normalize pixel values and pad to a square input.
只进行了normlize 和 padding操作, 长边缩放在transforms里 get_preprocess_shape
"""
# Normalize colors
x = (x - self.pixel_mean) / self.pixel_std
# Pad
h, w = x.shape[-2:]
padh = self.image_encoder.img_size - h
padw = self.image_encoder.img_size - w
x = F.pad(x, (0, padw, 0, padh))
return x
image_encoder.py
class Attention(nn.Module):
"""Multi-head Attention block with relative position embeddings.
中规中矩的实现
用torch.nn.modules.MultiheadAttention()效率可能更高(torch>=2.0貌似是)
self-attention还有很多的变体, flashAttention等(LLM中)
"""
def __init__(
self,
dim: int,
num_heads: int = 8,
qkv_bias: bool = True,
use_rel_pos: bool = False,
rel_pos_zero_init: bool = True,
input_size: Optional[Tuple[int, int]] = None,
) -> None:
"""
Args:
dim (int): Number of input channels.
num_heads (int): Number of attention heads.
qkv_bias (bool): If True, add a learnable bias to query, key, value.
rel_pos (bool): If True, add relative positional embeddings to the attention map.
rel_pos_zero_init (bool): If True, zero initialize relative positional parameters.
input_size (tuple(int, int) or None): Input resolution for calculating the relative
positional parameter size.
"""
super().__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = head_dim**-0.5
# 计算q,k,v
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias)
# 输出project, 或者用(head_dim*num_heads,dim)防止num_heads不能被dim整除
self.proj = nn.Linear(dim, dim)
# relative positional embeddings
self.use_rel_pos = use_rel_pos
if self.use_rel_pos:
assert (
input_size is not None
), "Input size must be provided if using relative positional encoding."
# initialize relative positional embeddings
self.rel_pos_h = nn.Parameter(
torch.zeros(2 * input_size[0] - 1, head_dim))
self.rel_pos_w = nn.Parameter(
torch.zeros(2 * input_size[1] - 1, head_dim))
def forward(self, x: torch.Tensor) -> torch.Tensor:
B, H, W, _ = x.shape
# qkv with shape (3, B, nHead, H * W, C)
qkv = self.qkv(x).reshape(B, H * W, 3, self.num_heads,
-1).permute(2, 0, 3, 1, 4)
# q, k, v with shape (B * nHead, H * W, C)
q, k, v = qkv.reshape(3, B * self.num_heads, H * W, -1).unbind(0)
# 计算qi&kj的相似度
attn = (q * self.scale) @ k.transpose(-2, -1)
# 在计算attn(softmax)前加入相似位置嵌入编码,也有用drop的
# attn 和 q,
if self.use_rel_pos:
attn = add_decomposed_rel_pos(attn, q, self.rel_pos_h,
self.rel_pos_w, (H, W), (H, W))
# 常规的计算和reshape
attn = attn.softmax(dim=-1)
x = (attn @ v).view(B, self.num_heads, H, W,
-1).permute(0, 2, 3, 1, 4).reshape(B, H, W, -1)
# 输出的 project
x = self.proj(x)
return x
def window_partition(x: torch.Tensor,
window_size: int) -> Tuple[torch.Tensor, Tuple[int, int]]:
"""
Partition into non-overlapping windows with padding if needed.
Args:
x (tensor): input tokens with [B, H, W, C].
window_size (int): window size. patch之间的window大小
Returns:
windows: windows after partition with [B * num_windows, window_size, window_size, C].
(Hp, Wp): padded height and width before partition
"""
B, H, W, C = x.shape
pad_h = (window_size - H % window_size) % window_size
pad_w = (window_size - W % window_size) % window_size
if pad_h > 0 or pad_w > 0:
x = F.pad(x, (0, 0, 0, pad_w, 0, pad_h))
Hp, Wp = H + pad_h, W + pad_w
x = x.view(B, Hp // window_size, window_size, Wp // window_size,
window_size, C)
windows = x.permute(0, 1, 3, 2, 4,
5).contiguous().view(-1, window_size, window_size, C)
return windows, (Hp, Wp)
def window_unpartition(windows: torch.Tensor, window_size: int,
pad_hw: Tuple[int, int],
hw: Tuple[int, int]) -> torch.Tensor:
"""
Window unpartition into original sequences and removing padding.
Args:
windows (tensor): input tokens with [B * num_windows, window_size, window_size, C].
window_size (int): window size.
pad_hw (Tuple): padded height and width (Hp, Wp).
hw (Tuple): original height and width (H, W) before padding.
Returns:
x: unpartitioned sequences with [B, H, W, C].
"""
Hp, Wp = pad_hw # padding后的image的大小
H, W = hw # image的大小
B = windows.shape[0] // (Hp * Wp // window_size // window_size)
x = windows.view(B, Hp // window_size, Wp // window_size, window_size,
window_size, -1)
x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, Hp, Wp, -1)
# 去掉padding的zero
if Hp > H or Wp > W:
x = x[:, :H, :W, :].contiguous()
return x
class PatchEmbed(nn.Module):
"""
Image to Patch Embedding.
有一点需要注意的是: 并没有合并patch的数量直接用的 image_H//ks, image_W//ks
"""
def __init__(
self,
kernel_size: Tuple[int, int] = (16, 16),
stride: Tuple[int, int] = (16, 16),
padding: Tuple[int, int] = (0, 0),
in_chans: int = 3,
embed_dim: int = 768,
) -> None:
"""
Args:
kernel_size (Tuple): kernel size of the projection layer.
stride (Tuple): stride of the projection layer.
padding (Tuple): padding size of the projection layer.
in_chans (int): Number of input image channels.
embed_dim (int): Patch embedding dimension.
"""
super().__init__()
# 经典操纵,使用卷积进行patch embedding
# embed_dim既嵌入的维度数,很巧妙!
# kernel_size : patch的大小,若==stride:non-overlapping ,若!=stride,不同patch有重叠
self.proj = nn.Conv2d(in_chans,
embed_dim,
kernel_size=kernel_size,
stride=stride,
padding=padding)
def forward(self, x: torch.Tensor) -> torch.Tensor:
x = self.proj(x)
# B C H W -> B H W C
x = x.permute(0, 2, 3, 1)
return x# This class and its supporting functions below lightly adapted from the ViTDet backbone available at: https://github.com/facebookresearch/detectron2/blob/main/detectron2/modeling/backbone/vit.py # noqa
class ImageEncoderViT(nn.Module):
"""
window_size : window_size大小的窗口内计算注意力,减少计算量!
"""
def __init__(
self,
img_size: int = 1024,
patch_size: int = 16,
in_chans: int = 3,
embed_dim: int = 768,
depth: int = 12,
num_heads: int = 12,
mlp_ratio: float = 4.0,
out_chans: int = 256,
qkv_bias: bool = True,
norm_layer: Type[nn.Module] = nn.LayerNorm,
act_layer: Type[nn.Module] = nn.GELU,
use_abs_pos: bool = True,
use_rel_pos: bool = False,
rel_pos_zero_init: bool = True,
window_size: int = 0,
global_attn_indexes: Tuple[int, ...] = (),
) -> None:
"""
Args:
img_size (int): Input image size.
patch_size (int): Patch size.
in_chans (int): Number of input image channels.
embed_dim (int): Patch embedding dimension.
depth (int): Depth of ViT.
num_heads (int): Number of attention heads in each ViT block.
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
qkv_bias (bool): If True, add a learnable bias to query, key, value.
norm_layer (nn.Module): Normalization layer.
act_layer (nn.Module): Activation layer.
use_abs_pos (bool): If True, use absolute positional embeddings.
use_rel_pos (bool): If True, add relative positional embeddings to the attention map.
rel_pos_zero_init (bool): If True, zero initialize relative positional parameters.
window_size (int): Window size for window attention blocks.
global_attn_indexes (list): Indexes for blocks using global attention.
"""
super().__init__()
self.img_size = img_size
self.patch_embed = PatchEmbed(
kernel_size=(patch_size, patch_size),
stride=(patch_size, patch_size),
in_chans=in_chans,
embed_dim=embed_dim,
)
# patch的位置
self.pos_embed: Optional[nn.Parameter] = None
if use_abs_pos:
# Initialize absolute positional embedding with pretrain image size.
self.pos_embed = nn.Parameter(
torch.zeros(1, img_size // patch_size, img_size // patch_size,
embed_dim))
self.blocks = nn.ModuleList()
for i in range(depth):
block = Block(
dim=embed_dim,
num_heads=num_heads,
mlp_ratio=mlp_ratio,
qkv_bias=qkv_bias,
norm_layer=norm_layer,
act_layer=act_layer,
use_rel_pos=use_rel_pos,
rel_pos_zero_init=rel_pos_zero_init,
window_size=window_size if i not in global_attn_indexes else 0,
input_size=(img_size // patch_size, img_size // patch_size),
)
self.blocks.append(block)
# 实际是在patch后的向量间进行的卷积
self.neck = nn.Sequential(
# 不同的向量间(序列)公用了一个变换!!很关键的理解,相当于一个linear
nn.Conv2d(
embed_dim,
out_chans,
kernel_size=1,
bias=False,
),
LayerNorm2d(out_chans),
nn.Conv2d(
out_chans,
out_chans,
kernel_size=3,
padding=1,
bias=False,
),
LayerNorm2d(out_chans),
)
def forward(self, x: torch.Tensor) -> torch.Tensor:
x = self.patch_embed(x)
if self.pos_embed is not None:
x = x + self.pos_embed
# backbone
for blk in self.blocks:
x = blk(x)
# neck
x = self.neck(x.permute(0, 3, 1, 2))
return x
class Block(nn.Module):
"""Transformer blocks with support of window attention and residual propagation blocks
1.采用的是pre-norm的形式,也有post-norm的代码
2.计算注意力时使用 window-partion,与之前的ViTs不同的地方!!! 增加了patch之间的交互(swinViT等等)
3.使用decomposed relate position embedding,很关键!!
其他的中规中矩
"""
def __init__(
self,
dim: int,
num_heads: int,
mlp_ratio: float = 4.0,
qkv_bias: bool = True,
norm_layer: Type[nn.Module] = nn.LayerNorm,
act_layer: Type[nn.Module] = nn.GELU,
use_rel_pos: bool = False,
rel_pos_zero_init: bool = True,
window_size: int = 0,
input_size: Optional[Tuple[int, int]] = None,
) -> None:
"""
Args:
dim (int): Number of input channels.
num_heads (int): Number of attention heads in each ViT block.
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
qkv_bias (bool): If True, add a learnable bias to query, key, value.
norm_layer (nn.Module): Normalization layer.
act_layer (nn.Module): Activation layer.
use_rel_pos (bool): If True, add relative positional embeddings to the attention map.
rel_pos_zero_init (bool): If True, zero initialize relative positional parameters.
window_size (int): Window size for window attention blocks. If it equals 0, then
use global attention.
input_size (tuple(int, int) or None): Input resolution for calculating the relative
positional parameter size.
"""
super().__init__()
self.norm1 = norm_layer(dim)
self.attn = Attention(
dim,
num_heads=num_heads,
qkv_bias=qkv_bias,
use_rel_pos=use_rel_pos,
rel_pos_zero_init=rel_pos_zero_init,
input_size=input_size if window_size == 0 else
(window_size, window_size),
)
self.norm2 = norm_layer(dim)
self.mlp = MLPBlock(embedding_dim=dim,
mlp_dim=int(dim * mlp_ratio),
act=act_layer)
self.window_size = window_size
def forward(self, x: torch.Tensor) -> torch.Tensor:
shortcut = x
# pre norm
x = self.norm1(x)
# Window partition
if self.window_size > 0:
H, W = x.shape[1], x.shape[2]
x, pad_hw = window_partition(x, self.window_size)
# atten
x = self.attn(x)
# Reverse window partition
if self.window_size > 0:
x = window_unpartition(x, self.window_size, pad_hw, (H, W))
# ==============
# mlp
x = shortcut + x
x = x + self.mlp(self.norm2(x))
return x重点(Calculate decomposed Relative Positional Embeddings)
def get_rel_pos(q_size: int, k_size: int,
rel_pos: torch.Tensor) -> torch.Tensor:
"""
Get relative positional embeddings according to the relative positions of
query and key sizes.
Args:
q_size (int): size of query q.
k_size (int): size of key k.
rel_pos (Tensor): relative position embeddings (L, C).
Returns:
Extracted positional embeddings according to relative positions.
"""
max_rel_dist = int(2 * max(q_size, k_size) - 1)
# Interpolate rel pos if needed.
if rel_pos.shape[0] != max_rel_dist:
# Interpolate rel pos.
rel_pos_resized = F.interpolate(
rel_pos.reshape(1, rel_pos.shape[0], -1).permute(0, 2, 1),
size=max_rel_dist,
mode="linear",
)
rel_pos_resized = rel_pos_resized.reshape(-1,
max_rel_dist).permute(1, 0)
else:
rel_pos_resized = rel_pos
# Scale the coords with short length if shapes for q and k are different.
q_coords = torch.arange(q_size)[:, None] * max(k_size / q_size, 1.0)
k_coords = torch.arange(k_size)[None, :] * max(q_size / k_size, 1.0)
relative_coords = (q_coords -
k_coords) + (k_size - 1) * max(q_size / k_size, 1.0)
return rel_pos_resized[relative_coords.long()]
def add_decomposed_rel_pos(
attn: torch.Tensor,
q: torch.Tensor,
rel_pos_h: torch.Tensor,
rel_pos_w: torch.Tensor,
q_size: Tuple[int, int],
k_size: Tuple[int, int],
) -> torch.Tensor:
"""
Calculate decomposed Relative Positional Embeddings from :paper:`mvitv2`.
https://github.com/facebookresearch/mvit/blob/19786631e330df9f3622e5402b4a419a263a2c80/mvit/models/attention.py # noqa B950
Args:
attn (Tensor): attention map.
q (Tensor): query q in the attention layer with shape (B, q_h * q_w, C).
rel_pos_h (Tensor): relative position embeddings (Lh, C) for height axis.
rel_pos_w (Tensor): relative position embeddings (Lw, C) for width axis.
q_size (Tuple): spatial sequence size of query q with (q_h, q_w).
k_size (Tuple): spatial sequence size of key k with (k_h, k_w).
Returns:
attn (Tensor): attention map with added relative positional embeddings.
"""
q_h, q_w = q_size
k_h, k_w = k_size
Rh = get_rel_pos(q_h, k_h, rel_pos_h)
Rw = get_rel_pos(q_w, k_w, rel_pos_w)
B, _, dim = q.shape
r_q = q.reshape(B, q_h, q_w, dim)
rel_h = torch.einsum("bhwc,hkc->bhwk", r_q, Rh)
rel_w = torch.einsum("bhwc,wkc->bhwk", r_q, Rw)
attn = (attn.view(B, q_h, q_w, k_h, k_w) + rel_h[:, :, :, :, None] +
rel_w[:, :, :, None, :]).view(B, q_h * q_w, k_h * k_w)
return attn到了这里,关于[SAM 代码解读 1] class Sam(nn.Module)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!