@TOC
一、简介
MPU-6050集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP,可用IIC接口连接一个第三方的数字传感器。MPU-6050对陀螺仪和加速度计分别用了三个16位的ADC,将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为250,500,1000,2000/秒(dps),加速度计可测范围为2,4,8,16g。
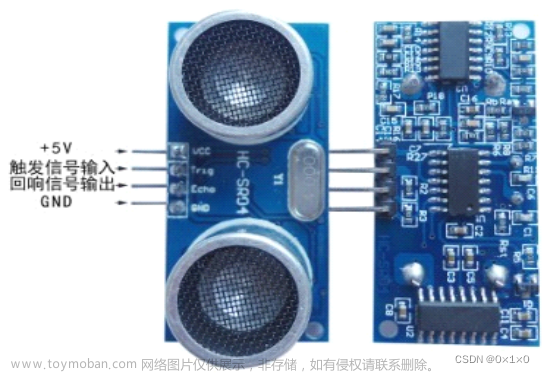
二、引脚说明
| 名称 | 描述 |
|---|---|
| VDD | DC+5v |
| GND | GND |
| SCL | IIC串行时钟线/SPI串行时钟端口 |
| SDA | IIC串行数据线/SPI串行数据输入 |
| XDA | 连接其他IIC设备的主机数据口 |
| XCL | 给IIC设备提供主时钟 |
| ADO | IIC器件地址选择位/SPI串行数据输出 |
| INT | 中断引脚 |
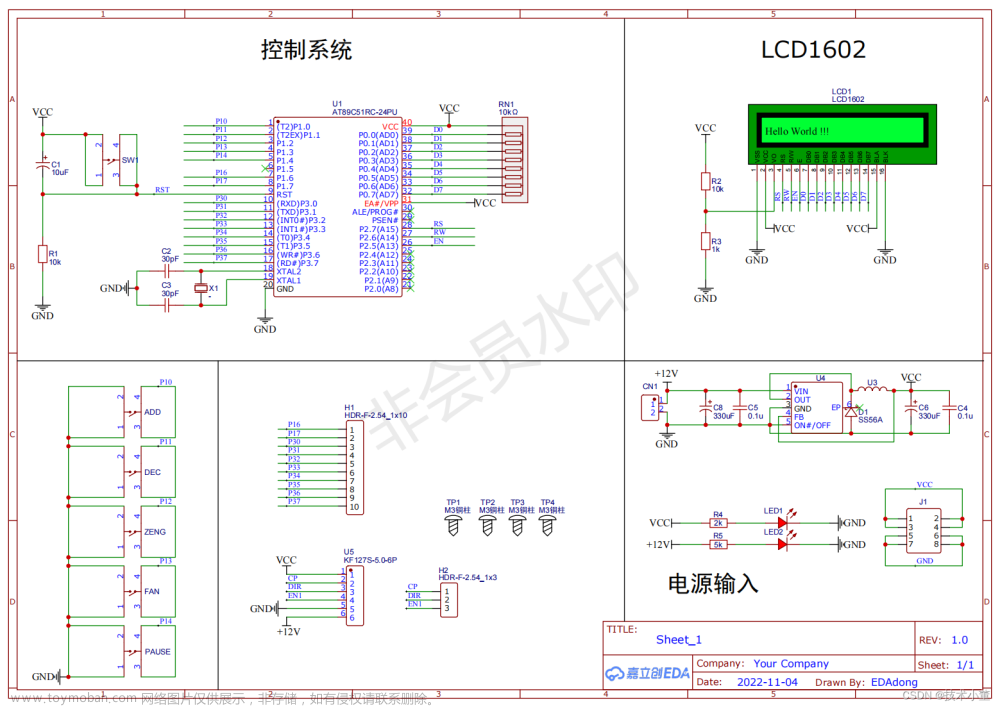
三、MPU-6050与51单片机开发板接线
| MPU6050 | 51单片机 |
|---|---|
| VCC | 5V |
| GND | GND |
| SDA | P1.1 |
| SCL | P1.0 |
四、51例程代码
//**************************************
//初始化MPU6050
//**************************************
void InitMPU6050()
{
Single_WriteI2C(PWR_MGMT_1, 0x00); //解除休眠状态
Single_WriteI2C(SMPLRT_DIV, 0x07);
Single_WriteI2C(CONFIG, 0x06);
Single_WriteI2C(GYRO_CONFIG, 0x18);
Single_WriteI2C(ACCEL_CONFIG, 0x01);
}
//**************************************
//合成数据
//**************************************
int GetData(uchar REG_Address)
{
char H,L;
H=Single_ReadI2C(REG_Address);
L=Single_ReadI2C(REG_Address+1);
return (H<<8)+L; //合成数据
}
//**************************************
//在1602上显示10位数据
//**************************************
void Display10BitData(int value,uchar x,uchar y)
{
value/=64; //转换为10位数据
lcd_printf(dis, value); //转换数据显示
DisplayListChar(x,y,dis,4); //启始列,行,显示数组,显示长度
}
//**************************************
//显示温度
//**************************************
//void display_temp()
//{
// Temp_h=Single_ReadI2C(TEMP_OUT_H); //读取温度
// Temp_l=Single_ReadI2C(TEMP_OUT_L); //读取温度
// Temperature=Temp_h<<8|Temp_l; //合成温度
// Temperature = 35+ ((double) (Temperature + 13200)) / 280; // 计算出温度
// lcd_printf(dis,Temperature); //转换数据显示
// DisplayListChar(11,1,dis,4); //启始列,行,显示数组,显示位数
//}
//*********************************************************
//主程序
//*********************************************************
void main()
{
delay(500); //上电延时
InitLcd(); //液晶初始化
InitMPU6050(); //初始化MPU6050
delay(150);
while(1)
{
Display10BitData(GetData(ACCEL_XOUT_H),2,0); //显示X轴加速度
Display10BitData(GetData(ACCEL_YOUT_H),7,0); //显示Y轴加速度
Display10BitData(GetData(ACCEL_ZOUT_H),12,0); //显示Z轴加速度
Display10BitData(GetData(GYRO_XOUT_H),2,1); //显示X轴角速度
Display10BitData(GetData(GYRO_YOUT_H),7,1); //显示Y轴角速度
Display10BitData(GetData(GYRO_ZOUT_H),12,1); //显示Z轴角速度
delay(500);
}
}
五、实际效果
 文章来源:https://www.toymoban.com/news/detail-507604.html
文章来源:https://www.toymoban.com/news/detail-507604.html
六、总结
MPU6050在平衡小车,四轴等产品上应用广泛,市面资料也比较齐全,想学习平衡车,四轴等产品可以从此模块开始学习;长期发布类似文章,欢迎关注,欢迎随时留言,需要程序或者软件也可以在下方留言喔!文章来源地址https://www.toymoban.com/news/detail-507604.html
到了这里,关于基于51单片机驱动MPU6050模块(LCD1602显示)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!