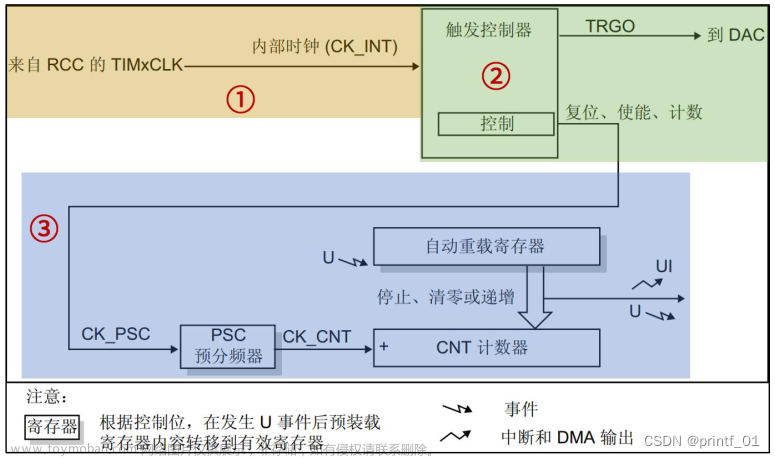
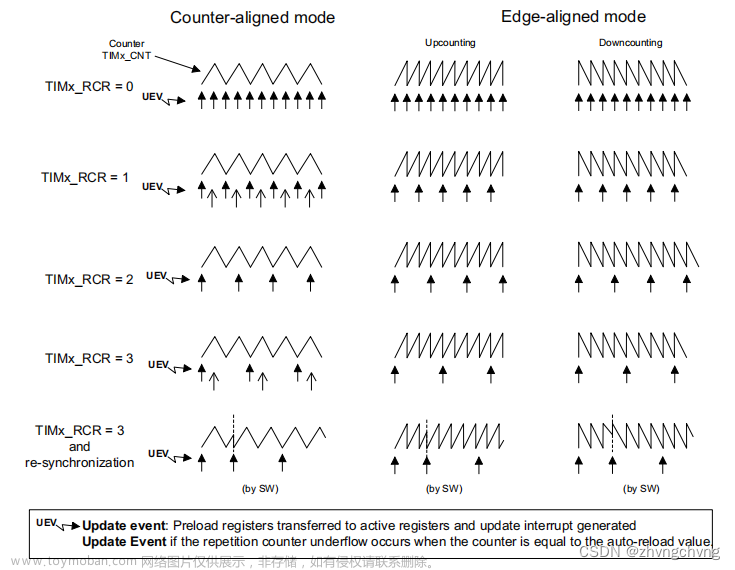
STM32定时器
PWM模式
#include "stm32f4xx.h"
void GPIO_Configuration(void);
void TIM3_Configuration(void);
int main(void)
{
GPIO_Configuration();
TIM3_Configuration();
while (1)
{
// 在这里可以根据需要调整电机的运动状态
}
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 使能GPIOB时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
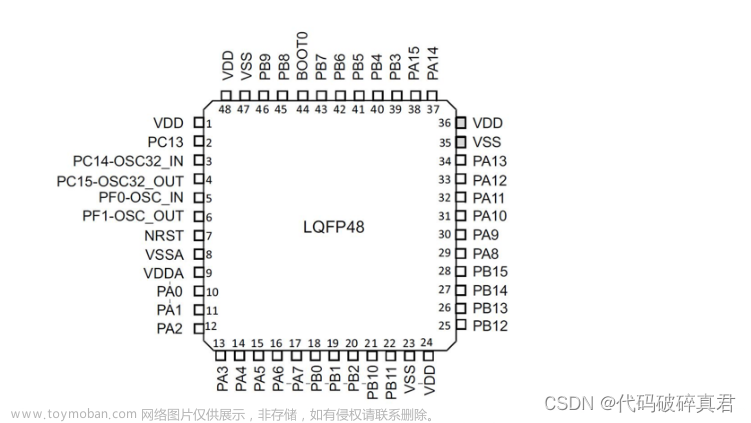
// 配置PB4引脚为复用功能,用于TIM3的通道1
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; // 复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; // 推挽输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; // 上拉
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; // 100MHz
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 配置PB4引脚为TIM3的通道1
GPIO_PinAFConfig(GPIOB, GPIO_PinSource4, GPIO_AF_TIM3);
}
void TIM3_Configuration(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
// 使能TIM3时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
// 配置TIM3的基本参数
TIM_TimeBaseStructure.TIM_Period = 999; // PWM周期为1000个时钟周期
TIM_TimeBaseStructure.TIM_Prescaler = 8399; // 时钟预分频为8400,使定时器时钟为10kHz
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
// 配置TIM3的通道1为PWM模式1
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
// 启动TIM3的通道1
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
// 启动TIM3
TIM_Cmd(TIM3, ENABLE);
}
在上面的例子中,我们使用了STM32的定时器3和GPIOB的引脚4来控制电机的运动。
首先,我们需要在GPIO配置函数中使能GPIOB的时钟,并将PB4引脚配置为复用功能,用于TIM3的通道1。
然后,在定时器配置函数中,我们使能了TIM3的时钟,并配置了TIM3的基本参数和通道1的PWM模式。
最后,我们在主函数中可以根据需要调整电机的运动状态。
上述代码中,我们使用了STM32的定时器3的通道1来输出PWM信号。在TIM3的配置函数中,我们使用了TIM_OCMode_PWM1模式来配置通道1为PWM输出模式1。
在PWM模式1下,当计数器的值小于或等于通道的比较值时,输出为高电平;当计数器的值大于通道的比较值时,输出为低电平。通过调整比较值的大小,我们可以控制PWM信号的占空比,从而控制电机的运动状态。
在上述代码中,我们将TIM3的周期设置为999,即PWM周期为1000个时钟周期。我们将TIM3的预分频器设置为8399,使得TIM3的时钟频率为10kHz。这样,我们可以通过调整比较值(即TIM3的通道1的比较寄存器的值)来控制PWM信号的占空比。
例如,如果我们将比较值设置为500,那么PWM信号的占空比将为50%(高电平500个时钟周期,低电平500个时钟周期),电机将以一定速度运动。如果我们将比较值设置为100,那么PWM信号的占空比将为10%(高电平100个时钟周期,低电平900个时钟周期),电机将以较慢的速度运动。
在主函数中,我们可以根据需要调整比较值的大小,从而控制电机的运动状态。
在上述代码中,电机的控制周期是通过定时器TIM3的配置来确定的。具体来说,我们将TIM3的周期设置为999,即PWM周期为1000个时钟周期。同时,我们将TIM3的预分频器设置为8399,使得TIM3的时钟频率为10kHz。因此,电机的控制周期为1000个时钟周期,即每个周期的时间为1000个时钟周期的时间。由于TIM3的时钟频率为10kHz,因此电机的控制周期为1000个时钟周期的时间,即0.1秒。
需要注意的是,电机的控制周期可以根据实际需求进行调整。在上述代码中,我们将TIM3的预分频器设置为8399,使得TIM3的时钟频率为10kHz,以便实现较高的控制精度。如果需要更快的控制周期,可以调整预分频器的值和TIM3的周期的值。
在代码中,我们将TIM3的预分频器设置为8399,使得TIM3的时钟频率为10kHz。而TIM3的周期被设置为999,即PWM周期为1000个时钟周期。因此,每个时钟周期的时间是由TIM3的时钟频率决定的,即100us(1 / 10kHz)。
由于TIM3的周期被设置为999,所以PWM信号的一个完整周期需要1000个时钟周期,即100ms(100us * 1000)。这个周期内,PWM信号的高电平时间(占空比)由比较值(TIM3的通道1的比较寄存器的值)决定。
所以,每个时钟周期的时间并不是1000个时钟周期,而是由TIM3的时钟频率决定的。在上述代码中,TIM3的时钟频率为10kHz,因此每个时钟周期的时间为100us。
编码器模式
以下是一个使用STM32的定时器4设置为编码器模式,并通过脉冲数来判断电机转动位置的示例代码:
#include "stm32f4xx.h"
#define ENCODER_PULSES_PER_REVOLUTION 1000 // 每转脉冲数
#define MOTOR_GEAR_RATIO 10 // 电机齿轮比
volatile int32_t encoder_count = 0; // 编码器计数器
void TIM4_IRQHandler(void)
{
if (TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) {
// 每次定时器溢出中断发生时,更新编码器计数器
encoder_count += (TIM4->CR1 & TIM_CR1_DIR) ? -1 : 1;
TIM_ClearITPendingBit(TIM4, TIM_IT_Update);
}
}
void configure_encoder(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_SetAutoreload(TIM4, 0xFFFF);
TIM_ClearFlag(TIM4, TIM_FLAG_Update);
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM4, ENABLE);
}
int32_t get_motor_position(void)
{
int32_t pulses_per_revolution = ENCODER_PULSES_PER_REVOLUTION * MOTOR_GEAR_RATIO;
return (encoder_count * 360) / pulses_per_revolution;
}
int main(void)
{
configure_encoder();
while (1) {
int32_t position = get_motor_position();
// 在这里使用获取到的位置进行相应的操作
}
}
在这个示例代码中,我们首先定义了每转脉冲数和电机齿轮比,然后声明了一个全局的encoder_count变量来存储编码器脉冲计数。
在TIM4_IRQHandler中断处理函数中,我们在每次定时器溢出中断发生时更新encoder_count变量。根据定时器的方向位来判断是增加还是减少计数。
configure_encoder函数用于配置定时器4为编码器模式,设置定时器的时钟分频、计数模式和编码器接口。
get_motor_position函数用于计算电机的位置,根据编码器计数和设定的脉冲数和齿轮比来计算电机的位置。
在main函数中,我们通过调用configure_encoder函数来配置编码器,然后在一个无限循环中不断获取电机的位置并进行相应的操作。文章来源:https://www.toymoban.com/news/detail-511809.html
请注意,以上代码仅为示例,具体的实现可能需要根据您的具体硬件和需求进行适当的修改。文章来源地址https://www.toymoban.com/news/detail-511809.html
代码中的定时器4编码器模式
以上代码是使用STM32的定时器4设置为编码器模式,并实时输出脉冲数的示例。
首先,在Encoder_Init_TIM4函数中,进行了以下设置:
1. 使能TIM4时钟和PORTB时钟。
2. 配置GPIOB的PB6和PB7引脚为浮空输入模式。
3. 初始化TIM4的预分频器和计数器自动重装值。
4. 选择时钟分频为不分频,选择计数模式为边沿对齐模式。
5. 配置输入捕获1滤波器和所有输入上升沿和下降沿都有效。
6. 设定计数器初始值。
7. 使能定时器。
然后,Read_Encoder函数用于单位时间读取编码器计数。根据传入的TIMX参数,选择相应的定时器,并返回其计数值。
在Encoder_Init_TIM4函数中,设置了定时器的计数器初始值为TIM4->CNT = 10000; 这里将计数器初始值设为一个固定值,可以根据实际需求进行调整。
然后,在Read_Encoder函数中,根据传入的TIMX参数选择相应的定时器,通过读取对应定时器的CNT寄存器,即可获取到编码器的计数值。
例如,如果传入的TIMX为4,则通过读取TIM4的CNT寄存器来获取编码器的计数值:
Encoder_TIM= (short)TIM4 -> CNT;
注意,这里使用了(short)进行类型转换,将CNT寄存器的值转换为一个有符号的短整型,以适应不同的计数范围。具体的计数范围可以根据实际的编码器和定时器配置进行调整。
(int)TIM4->CNT; 是将 TIM4 的 CNT 寄存器的值强制转换为 int 类型的数据。CNT 寄存器是定时器/计数器的计数器值寄存器,用于存储当前的计数器值。
在编码器模式下,TIM4 的 CNT 寄存器会根据编码器的脉冲输入进行自动计数。每当编码器的脉冲信号发生一个上升沿或下降沿时,CNT 寄存器的值就会相应地增加或减少。
通过读取 CNT 寄存器的值,可以获取当前的编码器计数值。在示例代码中,通过将 CNT 寄存器的值强制转换为 int 类型,可以将计数值作为整数返回。
到了这里,关于STM32定时器基本知识的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!