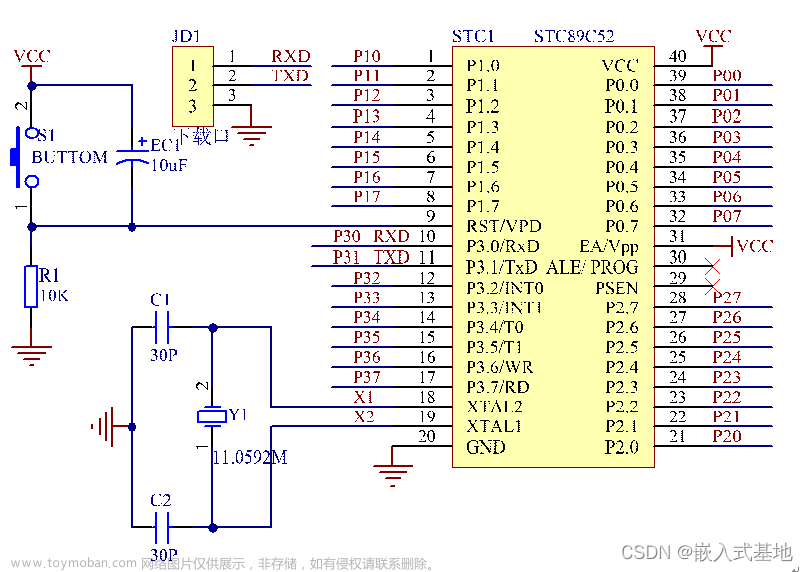
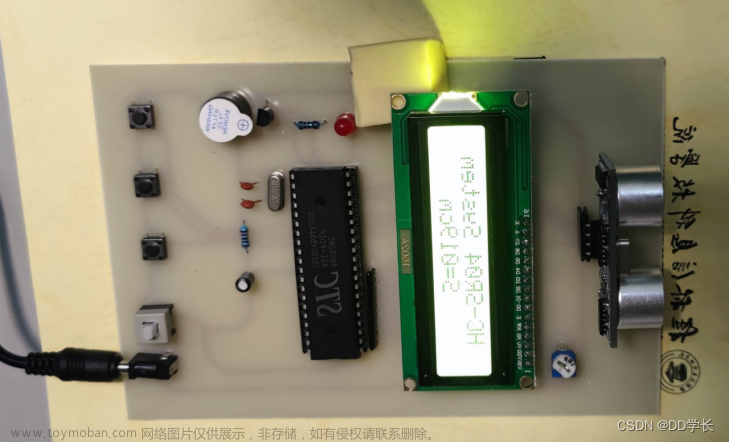
本设计采用AT89C51单片机为控制芯片,硬件上用dsb18202做温度采集(有需要也可以采用dht11温湿度模块)直流电机作为降温风扇,用户可通过按键来控制转速的大小,用继电器来控制电阻丝提高温度。用lcd1602显示屏来显示环境温度并且通过按键来设置模式与最高温和最低温。
实验现象:
首先它能显示环境的温度并能设置上下限阀值,这是最基本的功能,系统上电的时候显示的是当前环境温度和设定的温度阀值,我们可以通过按键来修改温度上下限阀值。我们看,按下这个K1键会进入温度阀值设置 界面,每按一下,切换一次阀值设置(上下阀值)界面,按第3次时,会自动回到主界面,如此循环。
在进入温度阀值设计界面时,可以通过K2、K3键对阀值进行加减,这里我们只对温度整数部分进行设置,小数部分我们就不需要了,将设置好的上下限阀值保存到AT24C02(EEPROM)内,当下一次开启系统时只需从AT24C02内读取保存的阀值数据,而不需要重复设置上下限阀值。这样的话,我们用3个按键就实现了温度上下限阀值的设定,这是温度检测控制系统基本的功能。假如我们把温度上限设置为32°C,下限设置为30°C。
另外还有恒定温度的功能。当设定好上下限阀值时,系统即会把当前的温度与设定的上下限阀值对比,如果高于上限温度,开启散热进行降温,同时报警;如果低于下限温度,开启加热,同时报警;如果当前温度处于下限和上限温度之间时,关闭散热、加热及报警。从而可将温度控制在阀值的范围内。
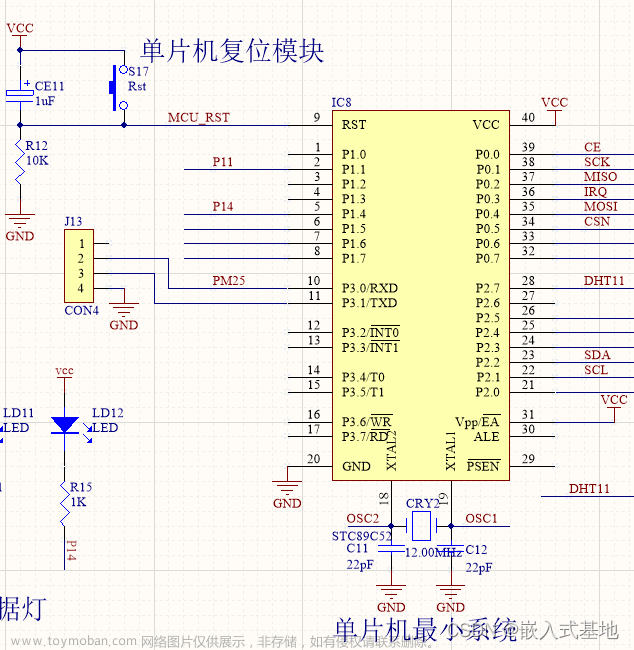
仿真图展示:

温度高于设定值,风扇反转,警报开启

温度低于设定值,加温开启并发出警报
部分功能视频展示:
视频地址:基于c51单片机的毕业设计——智能温度控制_哔哩哔哩_bilibili
https://www.bilibili.com/video/BV1yU4y177pp/
核心代码展示:
ds18b20的测温原理
DS18B20的读写时序和测温原理与DS1820相同,只是得到的温度值的位数因分辨率不同而不同,且温度转换时的延时时间由2s减为750ms。 DS18B20测温原理如图3所示。图中低温度系数晶振的振荡频率受温度影响很小,用于产生固定频率的脉冲信号发送给计数器1。高温度系数晶振随温度变化其振荡频率明显改变,所产生的信号作为计数器2的脉冲输入。计数器1和温度寄存器被预置在-55℃所对应的一个基数值。计数器1对低温度系数晶振产生的脉冲信号进行减法计数,当计数器1的预置值减到0时,温度寄存器的值将加1,计数器1的预置将重新被装入,计数器1重新开始对低温度系数晶振产生的脉冲信号进行计数,如此循环直到计数器2计数到0时,停止温度寄存器值的累加,此时温度寄存器中的数值即为所测温度。斜率累加器用于补偿和修正测温过程中的非线性,其输出用于修正计数器1的预置值。

lcd1602工作原理
点阵图形式液晶由M×N个显示单元组成,假设LCD显示屏有64行,每行有128列,每8列对应1字节的8位,即每行由16字节,共16×8=128个点组成。显示屏上64×16个显示单元与显示RAM区的1024字节相对应,每一字节的内容与显示屏上相应位置的亮暗对应。例如显示屏第一行的亮暗由RAM区的000H~00FH的16字节的内容决定,当(000H)=FFH时,屏幕左上角显示一条短亮线,长度为8个点;当(3FFH)=FFH时,屏幕右下角显示一条短亮线;当(000H)=FFH,(001H)=00H,(002H)=00H…,(00EH)=00H,(00FH)=00H时,在屏幕的顶部显示一条由8条亮线和8条暗线组成的虚线。这就是LCD显示的基本原理。


ds18b20初始化
#include "temp.h"
void Delay1ms(unsigned int y)
{
unsigned int x;
for(y;y>0;y--)
for(x=110;x>0;x--);
}
unsigned char Ds18b20Init()//初始化
{
unsigned int i;
DSPORT=0; //将总线拉低480us~960us
i=70;
while(i--);//延时642us
DSPORT=1; //然后拉高总线,如果DS18B20做出反应会将在15us~60us后总线拉低
i=0;
while(DSPORT) //等待DS18B20拉低总线
{
i++;
if(i>5000)//等待>5MS
return 0;//初始化失败
}
return 1;//初始化成功
}
void Ds18b20WriteByte(unsigned char dat)//写入一字节
{
unsigned int i,j;
for(j=0;j<8;j++)
{
DSPORT=0; //每写入一位数据之前先把总线拉低1us
i++;
DSPORT=dat&0x01; //然后写入一个数据,从最低位开始
i=6;
while(i--); //延时68us,持续时间最少60us
DSPORT=1; //然后释放总线,至少1us给总线恢复时间才能接着写入第二个数值
dat>>=1;
}
}
unsigned char Ds18b20ReadByte()//读取字节
{
unsigned char byte,bi;
unsigned int i,j;
for(j=8;j>0;j--)
{
DSPORT=0;//先将总线拉低1us
i++;
DSPORT=1;//然后释放总线
i++;
i++;//延时6us等待数据稳定
bi=DSPORT; //读取数据,从最低位开始读取
/*将byte左移一位,然后与上右移7位后的bi,注意移动之后移掉那位补0。*/
byte=(byte>>1)|(bi<<7);
i=4; //读取完之后等待48us再接着读取下一个数
while(i--);
}
return byte;
}
void Ds18b20ChangTemp()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20WriteByte(0xcc); //跳过ROM操作命令
Ds18b20WriteByte(0x44); //温度转换命令
// Delay1ms(100); //等待转换成功,而如果你是一直刷着的话,就不用这个延时了
}
void Ds18b20ReadTempCom()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20WriteByte(0xcc); //跳过ROM操作命令
Ds18b20WriteByte(0xbe); //发送读取温度命令
}
short Ds18b20ReadTemp()
{
unsigned char temp=0;
unsigned char tmh,tml;
short tem;
Ds18b20ChangTemp(); //先写入转换命令
Ds18b20ReadTempCom(); //然后等待转换完后发送读取温度命令
tml=Ds18b20ReadByte(); //读取温度值共16位,先读低字节
tmh=Ds18b20ReadByte(); //再读高字节
if(tmh>7)
{
tmh=~tmh;
tml=~tml;
temp=0;//温度为负
}
else
{
temp=1;//温度为正
}
tem=tmh; //获得高八位
tem<<=8;
tem|=tml;//获得底八位
tem=(double)tem*0.625;//转换 放大10倍 精度0.1
if(temp)
return tem; //返回温度值
else
return -tem;
}
lcd1602初始化
#include "lcd.h"
void Lcd1602_Delay1ms(uint c) //误差 0us
{
uchar a,b;
for (; c>0; c--)
{
for (b=199;b>0;b--)
{
for(a=1;a>0;a--);
}
}
}
#ifndef LCD1602_4PINS //当没有定义这个LCD1602_4PINS时
void LCD_WriteCmd(uchar com) //写入命令
{
LCD1602_E = 0; //使能
LCD1602_RS = 0; //选择发送命令
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = com; //放入命令
Lcd1602_Delay1ms(1); //等待数据稳定
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E = 0;
}
#else
void LCD_WriteCmd(uchar com) //写入命令
{
LCD1602_E = 0; //使能清零
LCD1602_RS = 0; //选择写入命令
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = com; //由于4位的接线是接到P0口的高四位,所以传送高四位不用改
Lcd1602_Delay1ms(1);
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5);
LCD1602_E = 0;
// Lcd1602_Delay1ms(1);
LCD1602_DATAPINS = com << 4; //发送低四位
Lcd1602_Delay1ms(1);
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5);
LCD1602_E = 0;
}
#endif
#ifndef LCD1602_4PINS
void LCD_WriteData(uchar dat) //写入数据
{
LCD1602_E = 0; //使能清零
LCD1602_RS = 1; //选择输入数据
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = dat; //写入数据
Lcd1602_Delay1ms(1);
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E = 0;
}
#else
void LCD_WriteData(uchar dat) //写入数据
{
LCD1602_E = 0; //使能清零
LCD1602_RS = 1; //选择写入数据
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = dat; //由于4位的接线是接到P0口的高四位,所以传送高四位不用改
Lcd1602_Delay1ms(1);
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5);
LCD1602_E = 0;
LCD1602_DATAPINS = dat << 4; //写入低四位
Lcd1602_Delay1ms(1);
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5);
LCD1602_E = 0;
}
#endif
#ifndef LCD1602_4PINS
void LcdInit() //LCD初始化子程序
{
LCD_WriteCmd(0x38); //开显示
LCD_WriteCmd(0x0c); //开显示不显示光标
LCD_WriteCmd(0x06); //写一个指针加1
LCD_WriteCmd(0x01); //清屏
LCD_WriteCmd(0x80); //设置数据指针起点
}
#else
void LCD_Init() //LCD初始化子程序
{
LCD_WriteCmd(0x32); //将8位总线转为4位总线
LCD_WriteCmd(0x28); //在四位线下的初始化
LCD_WriteCmd(0x0c); //开显示不显示光标
LCD_WriteCmd(0x06); //写一个指针加1
LCD_WriteCmd(0x01); //清屏
LCD_WriteCmd(0x80); //设置数据指针起点
}
#endif
void LCD_Clear()
{
LCD_WriteCmd(0x01);
LCD_WriteCmd(0x80);
}
//在任何位置显示字符串
void LCD_Dispstring(u8 x,u8 line,u8 *p)
{
char i=0;
if(line<1) //第一行显示
{
while(*p!='\0')
{
if(i<16-x)
{
LCD_WriteCmd(0x80+i+x);
}
else
{
LCD_WriteCmd(0x40+0x80+i+x-16);
}
LCD_WriteData(*p);
p++;
i++;
}
}
else //第2行显示
{
while(*p!='\0')
{
if(i<16-x)
{
LCD_WriteCmd(0x80+0x40+i+x);
}
else
{
LCD_WriteCmd(0x80+i+x-16);
}
LCD_WriteData(*p);
p++;
i++;
}
}
}
lcd屏显示ds18b20检测温度
void Temp_DataPros()
{
short temp;
u8 temp_buf[5];
temp=Ds18b20ReadTemp();
temp_val=temp;
if(temp<0)
{
temp=-temp;
LCD_Dispstring(2+5,0,"-");
}
else
{
LCD_Dispstring(2+5,0," ");
}
temp_buf[0]=temp/100+0x30;
temp_buf[1]=temp%100/10+0x30;
temp_buf[2]='.';
temp_buf[3]=temp%100%10+0x30;
temp_buf[4]='\0';
LCD_Dispstring(2+6,0,temp_buf); //显示检测的温度xx.x
temp_buf[0]=set_temph/10+0x30;
temp_buf[1]=set_temph%10+0x30;
temp_buf[2]='\0';
LCD_Dispstring(5,1,temp_buf); //显示设定的温度上限值xx
temp_buf[0]=set_templ/10+0x30;
temp_buf[1]=set_templ%10+0x30;
temp_buf[2]='\0';
LCD_Dispstring(14,1,temp_buf); //显示设定的温度下限值xx
}
按键模式选择并调节文章来源:https://www.toymoban.com/news/detail-512826.html
u8 KEY_Scan(u8 mode)
{
static u8 key=1;
if(key&&(k1==0||k2==0||k3==0))
{
delay(1000); //消抖
key=0;
if(k3==0)
{
return K1_MODE;
}
else if(k1==0)
{
return K2_ADD;
}
else if(k2==0)
{
return K3_DEC;
}
}
else if(k1==1&&k2==1&&k3==1)
{
key=1;
}
if(mode)
{
key=1;
}
return 0;
}
void KEY_Pros()
{
u8 key;
u8 temph_buf[3];
key=KEY_Scan(0);
if(key==K1_MODE) //模式选择
{
mode++;
LCD_Clear();
if(mode==1)
{
LCD_Dispstring(0,1,"SETH: C");
LCD_Dispstring(2,0,"N-TEM: C");
}
else if(mode==2)
{
LCD_Dispstring(0,1,"SETL: C");
LCD_Dispstring(2,0,"N-TEM: C");
}
else
{
mode=0;
LCD_Dispstring(2,0,"Temp: C");
LCD_Dispstring(0,1,"SETH: ");
LCD_Dispstring(9,1,"SETL: ");
}
}
if(mode==1) //温度上限设置
{
switch(key)
{
case K2_ADD: //加
set_temph++;
if(set_temph>=80)set_temph=80;
break;
case K3_DEC: //减
set_temph--;
if(set_temph<=0)set_temph=0;
break;
}
temph_buf[0]=set_temph/10+0x30;
temph_buf[1]=set_temph%10+0x30;
temph_buf[2]='\0';
LCD_Dispstring(9,0,temph_buf);
At24c02Write(0,set_temph);
}
else if(mode==2) //温度下限设置
{
switch(key)
{
case K2_ADD: //加
set_templ++;
if(set_templ>=80)set_templ=80;
break;
case K3_DEC: //减
set_templ--;
if(set_templ<=0)set_templ=0;
break;
}
temph_buf[0]=set_templ/10+0x30;
temph_buf[1]=set_templ%10+0x30;
temph_buf[2]='\0';
LCD_Dispstring(5,1,temph_buf);
At24c02Write(2,set_templ);
}
核心代码及仿真图展示完毕,获取完整源码下载地址:https://download.csdn.net/download/weixin_51322363/21106377文章来源地址https://www.toymoban.com/news/detail-512826.html
到了这里,关于基于c51单片机的毕业设计——智能温度控制的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!