一、工业相机的结构
 工业相机一般由镜头接口、滤光片、图像传感器、驱动电路、数字图像处理模块、转换电路、相机的供电/控制信号接口、图像数据传输组成接口。
工业相机一般由镜头接口、滤光片、图像传感器、驱动电路、数字图像处理模块、转换电路、相机的供电/控制信号接口、图像数据传输组成接口。
二、工业相机的分类
1、按照相机芯片分类
| 按照芯片工艺分类 | CCD | CMOS |
| 曝光方式 | 一般为全局曝光 | 卷帘/全局曝光 |
| 灵敏度 | 同样面积下灵敏度高 | 灵敏度较弱 |
| 成本 | 线路品质影响程度高,成本高 | CMOS整合集成,成本低 |
| 解析度 | 连接复杂度低,解析度高 | 解析度稍低 |
| 噪点比 | 单一放大,噪点低 | 百万放大,噪点高 |
| 功耗 | 需额外加电,功耗高 | 直接方大,功耗低 |
2、按照传感器分类
| 按照传感器分类 | 线扫相机 | 面阵相机 |
| 芯片形状 |  |
 |
| 成像条件 | 相机和物体之间需要有相对运动 | 物体静止或运动都可以成像 |
| 数据接口 | 一般为GigE或Cam Link | USB、IEEE13944、GigE、Cam Link |
| 成本 | 成本较高 | 根据数据性能,价格不同 |
一般情况下线扫相机可以用来拍片式产品,比如片式框架产品、LED等,一般情况下相机是静止的,电机带动产品运动。
3、按照图像模式分类
| 按照图像模式分类 | |
| 彩色相机 | 图像为彩色,一般为24位图像 |
| 黑白相机 | 图像为灰度图像,一般为8位图像 |
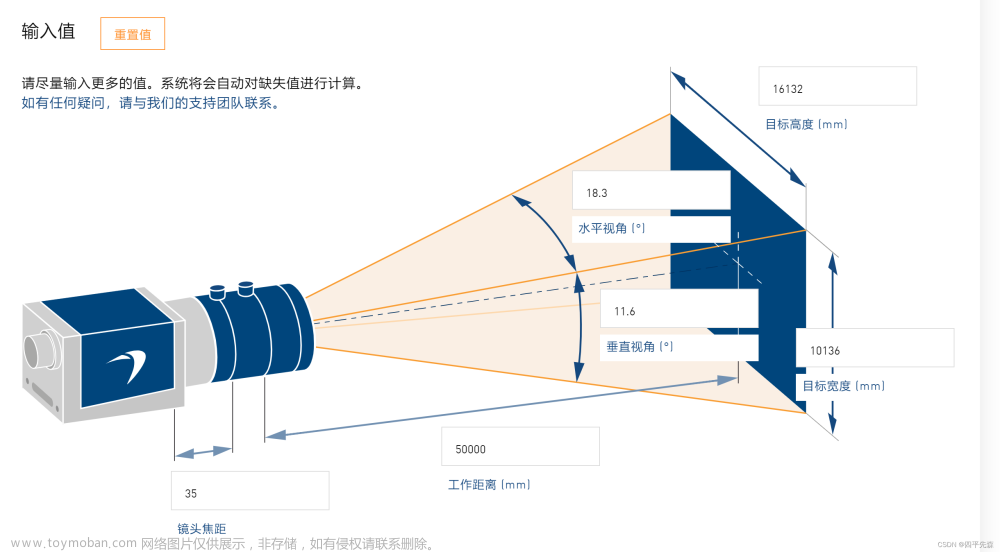
三、工业相机的参数
1、镜头接口
相机和镜头配合使用时的连接方式成为接口,机器视觉行业常见的几种镜头接口为C口、CS口、F口。一般情况下C口的接口方式为螺纹口,F口的接口方式为卡口。
2、芯片尺寸
芯片尺寸表示图像传感器感光区域的面积大小,直接决定了整个系统的物理放大率。
常见的芯片尺寸有1/4英寸、1/3英寸、1/2英寸、2/3英寸、1英寸。
3、传感器与镜头的匹配
所有的镜头都有最大兼容的相机芯片尺寸。
选择相机和镜头时,遵循“镜头最大兼容芯片尺寸>=相机芯片尺寸”的元组。

4、像元尺寸
像元尺寸表示相机芯片每个像元的实际物理大小。
常见的像元尺寸有3.45um、3.75um、4.4um、4.8um、5.3um、5.8um、7.4um等
5、分辨率
相机分辨率是指图像像素的宽度和高度。
6、相机快门类型
(1)卷帘快门
卷帘快门的特征是逐行曝光,每一行的曝光时间不一致。大多数CMOS图像传感器上使用的是卷帘宽门。卷帘宽门不适用高速运动的检测对象。
(2)全局快门
CCD传感器和极少数CMOS传感器采用的快门,传感器上所有图像同时刻曝光。
7、曝光时间
相机曝光时间是指从快门打开到关闭的时间间隔。
快门速度越快,曝光时间越短,图像产生拖影的几率越小,图像越清晰。
8、计算物体运动不产生拖影的曝光时间
拍摄高速运动物体时,为使图像不产生拖影,营使物体在曝光时间内移动的距离不超过一个像元尺寸。
例如:
已知物体运动速度为150mm/s,沿芯片水平方向运动,相机芯片为1/2英寸(6.4mm*4.8mm),水平方向视野为20mm,像元尺寸为5.3um
放大倍数:6.4mm/20mm = 0.32
计算像的运动速度:0.32*150mm/s = 48mm/s
曝光时间:5.3um/48mm/s = 0.00011s
9、数据传输接口
一般工业相机常见的数据传输方式有USB、FireWire、GigE、Cam Link。

目前在机器视觉中,用的最多的一般是USB3.0、GigE。
10、帧率
相机的帧率一般指相机每秒钟可以采集多少张图像,单位为FPS,即帧/秒。
11、供电方式
(1)传统供电方式+以太网通信

(2)POE供电方式文章来源:https://www.toymoban.com/news/detail-514189.html
 文章来源地址https://www.toymoban.com/news/detail-514189.html
文章来源地址https://www.toymoban.com/news/detail-514189.html
到了这里,关于机器视觉 工业相机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!