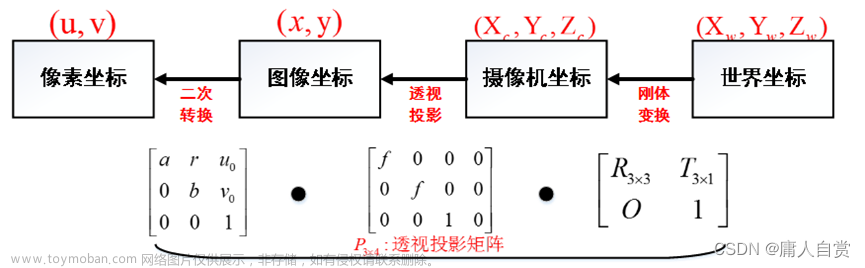
相机坐标到图像坐标的转换通常需要使用相机内参矩阵和外参矩阵。在OpenCV中,可以通过cv2.projectPoints()函数实现相机坐标到图像坐标的转换。具体的程序如下:
import cv2
import numpy as np
# 读取图像和相机参数
img = cv2.imread('test.jpg')
K = np.array([[1000, 0, 500], [0, 1000, 500], [0, 0, 1]], dtype=np.float32)
R = np.array([[1, 0, 0], [0, 1, 0], [0, 0, 1]], dtype=np.float32)
t = np.array([0, 0, 0], dtype=np.float32)
# 定义三维坐标点
point_3d = np.array([[0, 0, 1]], dtype=np.float32)
# 进行相机坐标到图像坐标的转换
point_2d, _ = cv2.projectPoints(point_3d, R, t, K, distCoeffs=None)
# 将结果转换为整数
point_2d = tuple(map(int, point_2d[0].tolist()))
# 在图像上绘制点
cv2.circle(img, point_2d, 3, (0, 0, 255), -1)
# 显示图像
cv2.imshow('Image', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
以上代码中,读取了一张图像和相机参数,使用cv2.projectPoints()函数进行相机坐标到图像坐标的转换,最后在图像上绘制了转换后的点并显示出来。文章来源:https://www.toymoban.com/news/detail-514448.html
需要注意的是,cv2.projectPoints()函数的第一个参数是三维坐标点的数组,每行表示一个点的坐标;第二个参数是旋转矩阵;第三个参数是平移向量;第四个参数是相机内参矩阵;第五个参数是相机的畸变系数,如果没有畸变可以设置为None。函数的返回值包括转换后的二维坐标点和每个点的向量长度,可以通过下划线接收。文章来源地址https://www.toymoban.com/news/detail-514448.html
到了这里,关于opencv相机坐标到图像坐标的转换的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!