❤️ 专栏简介:本专栏记录了从零学习单片机的过程,其中包括51单片机和STM32单片机两部分;建议先学习51单片机,其是STM32等高级单片机的基础;这样再学习STM32时才能融会贯通。
☀️ 专栏适用人群 :适用于想要从零基础开始学习入门单片机,且有一定C语言基础的的童鞋。
🌙专栏目标:实现从零基础入门51单片机和STM32单片机,力求在玩好单片机的同时,能够了解一些计算机的基本概念,了解电路及其元器件的基本理论等。⭐️ 专栏主要内容: 主要学习STM32单片机的功能、各个模块、单片机的外设、驱动等,最终玩好单片机和单片机的外设,全程手敲代码,实现我们所要实现的功能。
🌴 专栏说明 :如果文章知识点有错误的地方,欢迎大家随时在文章下面评论,我会第一时间改正。让我们一起学习,一起进步。
💑专栏主页:http://t.csdn.cn/HCD8v
本学习过程参考:https://space.bilibili.com/383400717
STM3单片机安装软件、各种资料以及源码的路径:
链接:https://pan.baidu.com/s/1snD0uuTfMhchFqOMWvAiHA?pwd=asdf#list/path=%2F
提取码:asdf
链接里压缩包的解压密码:32
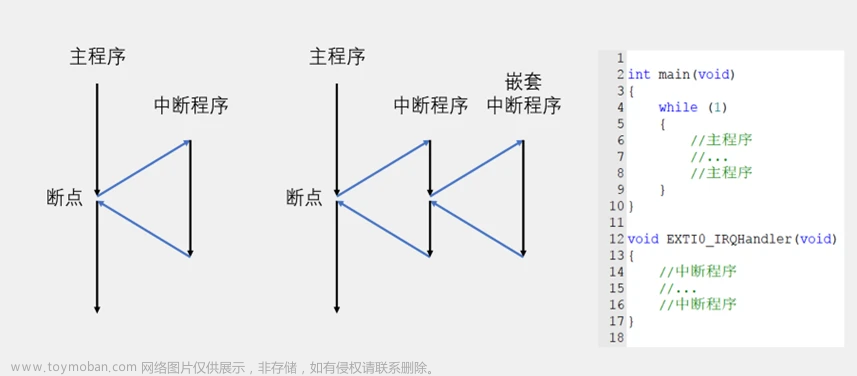
本大节主要学习STM32的中断系统和外部中断,包含两部分,第一小节主要学习中断系统的基础知识,第二小节是写两个程序进行练习,即对射式红外传感器计次和旋转编码器计次,最终附上所有的源代码;
本小节主要是对上一节学习的EXTI外部中断进行实战练习,编写程序进行练习,实现旋转编码器计次,并附上程序源码;
一、本节目标
目标:旋转编码器计次
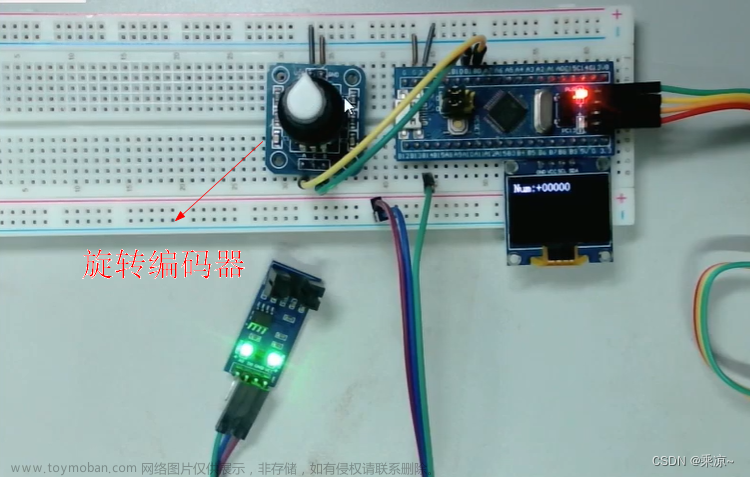
转动“旋转编码器”时,OLED屏幕上的数字也跟着变化;例如当向右转动旋转编码器时,屏幕上的数字变大,向左转动旋转编码器时,屏幕上的数字变小,如下图所示,初始数字为0
当向右旋转时,数字逐渐变大: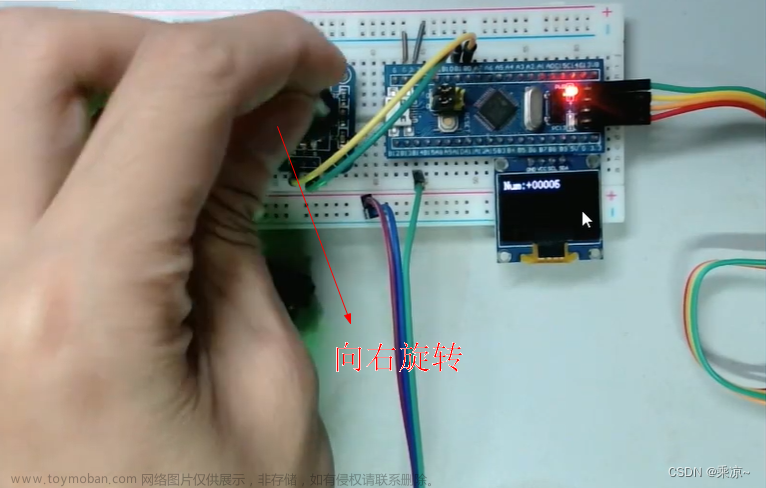
向左旋转时,数字变小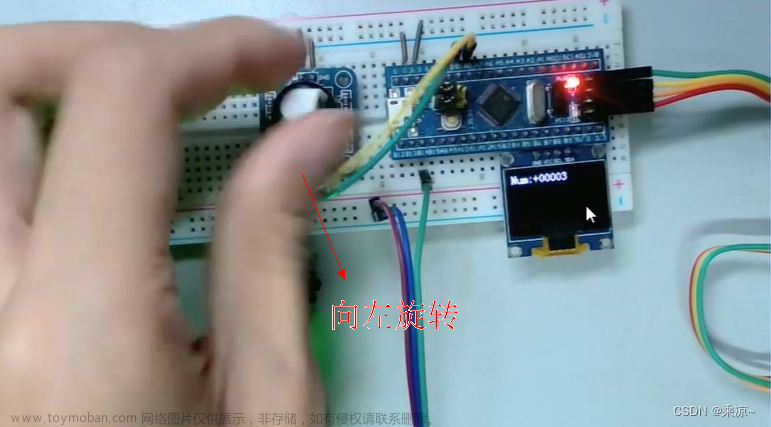
二、设备介绍
2.1 设备介绍
2.1.1 旋转编码器介绍
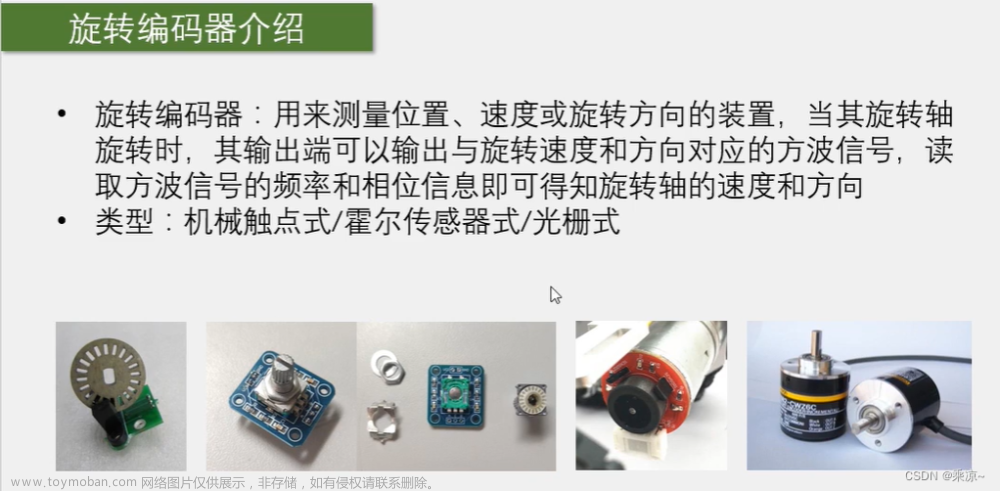
- 第一个图的旋转编码器只能测位置和速度,不能测方向
- 第二个图是本课程使用的旋转编码器,第三张图是其内部拆解;既可以测位置和速度,也可以测方向;
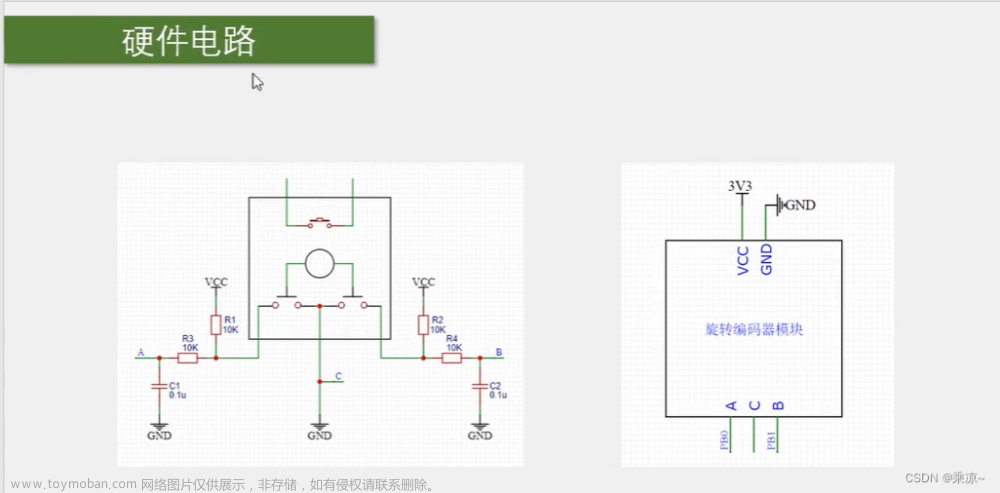
2.1.2 旋转编码器硬件电路
三、旋转编码器计次源码
代码路径:\STM32入门教程资料\STM32入门教程资料\程序源码\程序源码\STM32Project\5-2 旋转编码器计次\User
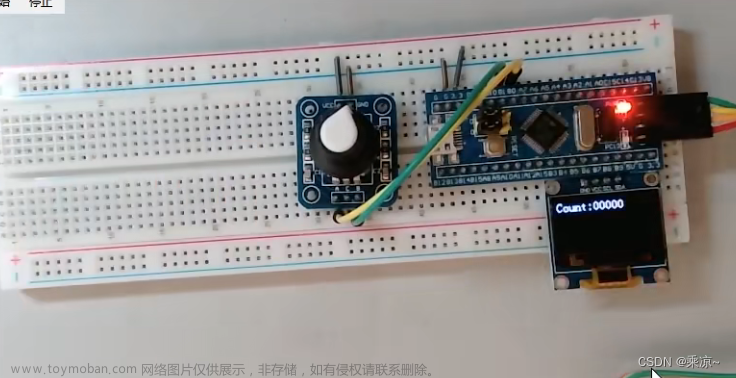
3.1 接线图
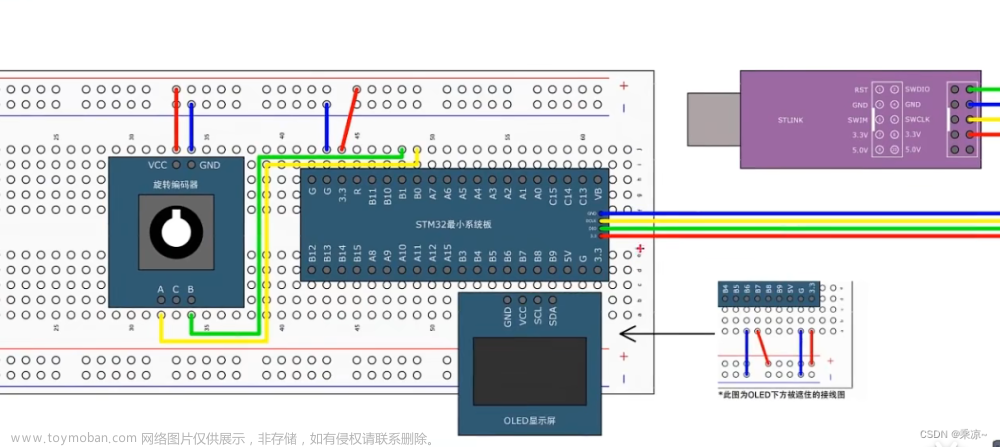
左边旋转编码器模块,上面VCC和GND接正负极,下面这两个A,B相输出引脚,分别接到STM32的PB0和PB1两个引脚;
实物接线图如下所示:
 文章来源:https://www.toymoban.com/news/detail-515197.html
文章来源:https://www.toymoban.com/news/detail-515197.html
3.2 代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Encoder.h"
int16_t Num;
int main(void)
{
OLED_Init();
Encoder_Init();
OLED_ShowString(1, 1, "Num:");
while (1)
{
Num += Encoder_Get();
OLED_ShowSignedNum(1, 5, Num, 5);
}
}
Encoder.c:文章来源地址https://www.toymoban.com/news/detail-515197.html
#include "stm32f10x.h" // Device header
int16_t Encoder_Count;
void Encoder_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1);
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_Init(&NVIC_InitStructure);
}
int16_t Encoder_Get(void)
{
int16_t Temp;
Temp = Encoder_Count;
Encoder_Count = 0;
return Temp;
}
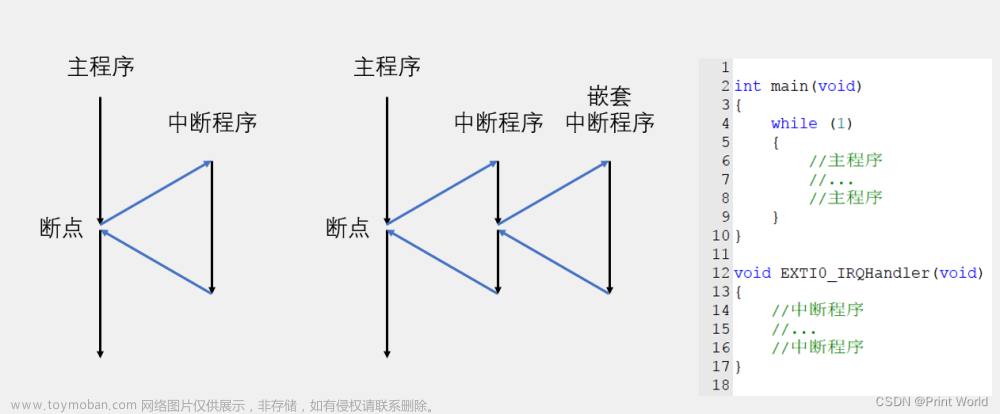
void EXTI0_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line0) == SET)
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)
{
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
Encoder_Count --;
}
}
EXTI_ClearITPendingBit(EXTI_Line0);
}
}
void EXTI1_IRQHandler(void)
{
if (EXTI_GetITStatus(EXTI_Line1) == SET)
{
/*如果出现数据乱跳的现象,可再次判断引脚电平,以避免抖动*/
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0)
{
if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0)
{
Encoder_Count ++;
}
}
EXTI_ClearITPendingBit(EXTI_Line1);
}
}
到了这里,关于STM32单片机(五)第二节:EXTI外部中断练习2(旋转编码器计次)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!