码字不易,路过的朋友动动小手点点赞吧
前言
传感器融合少不了的就是联合标定,最近大火的激光雷达和相机传感器融合算法,让很多工程师学者投入精力学习,本文简单介绍一下激光雷达和相机传感器坐标系转换的原理。
一、坐标系转换
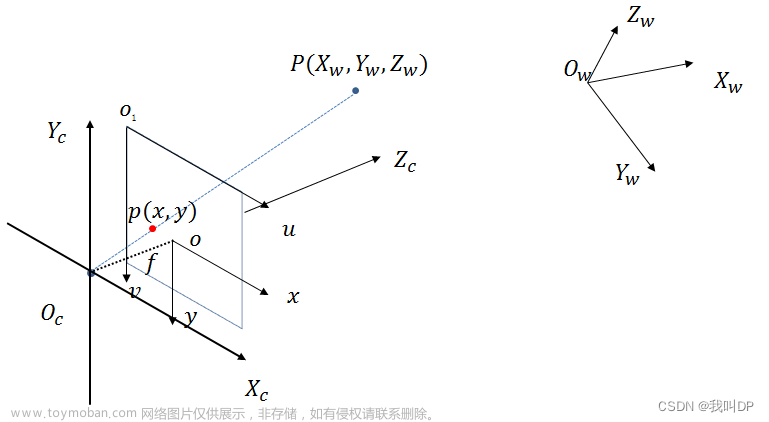
传感器安装位置不同,而且每个传感器都有自己的坐标系,所以一个目标在每个传感器的坐标系下都是不同的坐标,但是我们感知需要的是一个统一的位置坐标,因此我们想要联用两个传感器必须要把两个传感器的坐标系给统一起来,得到一个坐标。这样才能开启后续的开发工作。
传感器坐标系转换,可以由两个动作完成:1、旋转 2、平移。如下图所示:

1.旋转操作

绕X轴旋转之后的关系式为:(自己推一下公式吧)

同理,绕y轴和绕z轴旋转之后的关系式为:


2.平移操作

则: 摄像头的坐标和激光雷达坐标之间的关系文章来源:https://www.toymoban.com/news/detail-515589.html
 文章来源地址https://www.toymoban.com/news/detail-515589.html
文章来源地址https://www.toymoban.com/news/detail-515589.html
到了这里,关于激光雷达坐标系和相机坐标系相互变换(易懂不详细)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!






![[自动驾驶算法][从0开始轨迹预测]:一、坐标系和坐标系变换](https://imgs.yssmx.com/Uploads/2024/01/814950-1.png)




