首先下载代码:git clone https://github.com/ssz160107/catkin_ws_arm.git
打开文件夹如下图所示


打开一个终端运行mini_4wd_six_arm_moveit_config文件打开rviz和moveit


再打开一个终端运行wheeltec_arm_rc文件夹里的python脚本

把鼠标放在下面这个界面就可以通过键盘控制机械臂运动

注意:
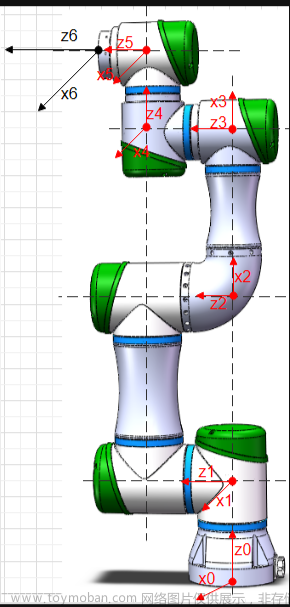
1、python代码中joint1、joint2、joint3、joint4、joint5分别代表机械臂除了爪子的五个关节,joint6、joint8分别代表两个爪子。
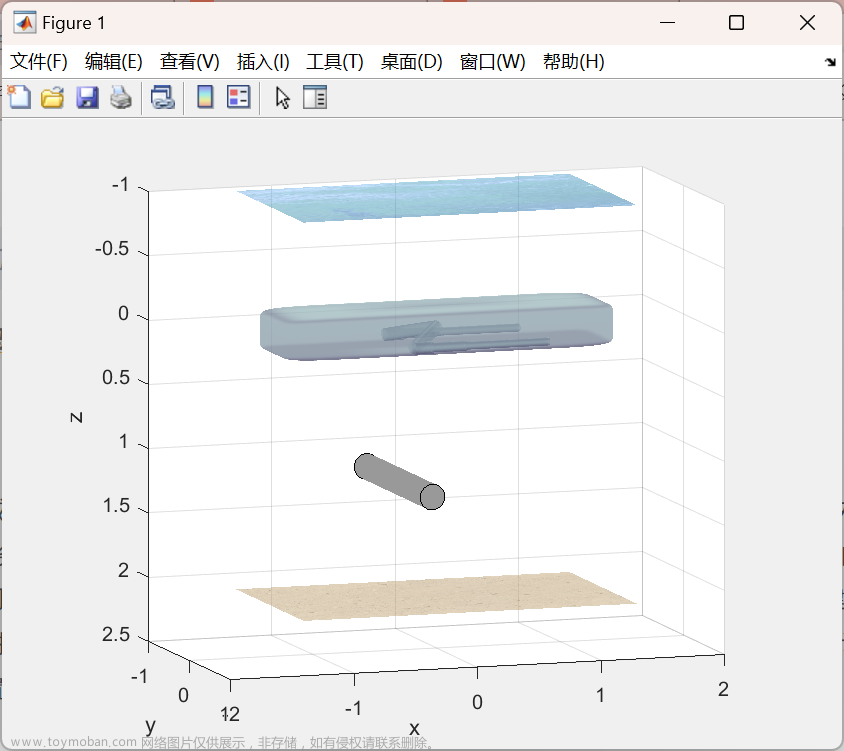
2、此例程只控制机械臂运动,而rviz中机械臂下面的小车不能进行控制,键盘的按键1/q,2/w,3/e,4/r,5/t,6/y可以控制机械臂各个对应的关节转动,按键f可以使机械臂到达一个特殊设定的位置,如下图所示

空格按键可以使机械臂到达复位状态,即直立起来。
3.按键进行控制的时候,第一个打开的终端会出现警告,此警告是因为夹爪部分的四个小关节没有在python文件定义和小车轮子的4个关节没有使用,可以忽略文章来源:https://www.toymoban.com/news/detail-516100.html
 文章来源地址https://www.toymoban.com/news/detail-516100.html
文章来源地址https://www.toymoban.com/news/detail-516100.html
到了这里,关于键盘+moveit+rviz 控制六轴机械臂(仿真)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!