引言
这个功能看似鸡肋,但对于无人机目标识别与追踪有重要意义,通过目标在摄像头视野的坐标位置,可以推算出无人机相对与目标的位置,从而对无人机进行位置矫正。因此,添加代码打印坐标并不是主要目的,关键在于寻找坐标信息在工程中的位置。
实现
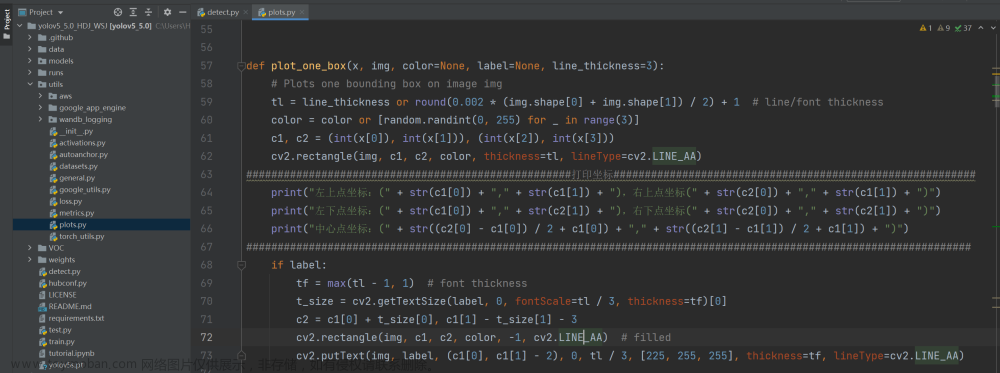
在utils文件夹下的plot.py中plot_one_box函数下添加下面三行代码,输出目标框的五点坐标。
print("左上点的坐标为:(" + str(c1[0]) + "," + str(c1[1]) + "),右上点的坐标为(" + str(c2[0]) + "," + str(c1[1]) + ")")
print("左下点的坐标为:(" + str(c1[0]) + "," + str(c2[1]) + "),右下点的坐标为(" + str(c2[0]) + "," + str(c2[1]) + ")")
print("中心点的坐标为:(" + str((c2[0] - c1[0]) / 2 + c1[0]) + "," + str((c2[1] - c1[1]) / 2 + c1[1]) + ")")
注意,坐标原点是捕捉到画面的左上角
给出修改后的plot_one_box()函数完整代码:
def plot_one_box(x, img, color=None, label=None, line_thickness=3):
# Plots one bounding box on image img
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
######################################打印坐标#############################
print("左上点的坐标为:(" + str(c1[0]) + "," + str(c1[1]) + "),右上点的坐标为(" + str(c2[0]) + "," + str(c1[1]) + ")")
print("左下点的坐标为:(" + str(c1[0]) + "," + str(c2[1]) + "),右下点的坐标为(" + str(c2[0]) + "," + str(c2[1]) + ")")
print("中心点的坐标为:(" + str((c2[0] - c1[0]) / 2 + c1[0]) + "," + str((c2[1] - c1[1]) / 2 + c1[1]) + ")")
##########################################################################
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
效果
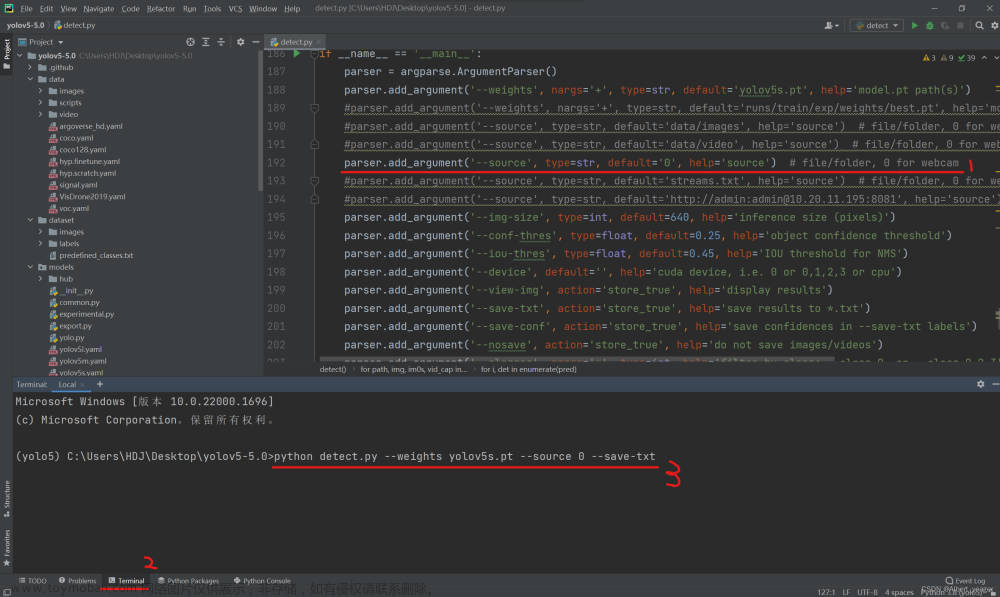
运行图片识别


可以看到在运行结果中打印出了各个目标的位置信息
视频识别
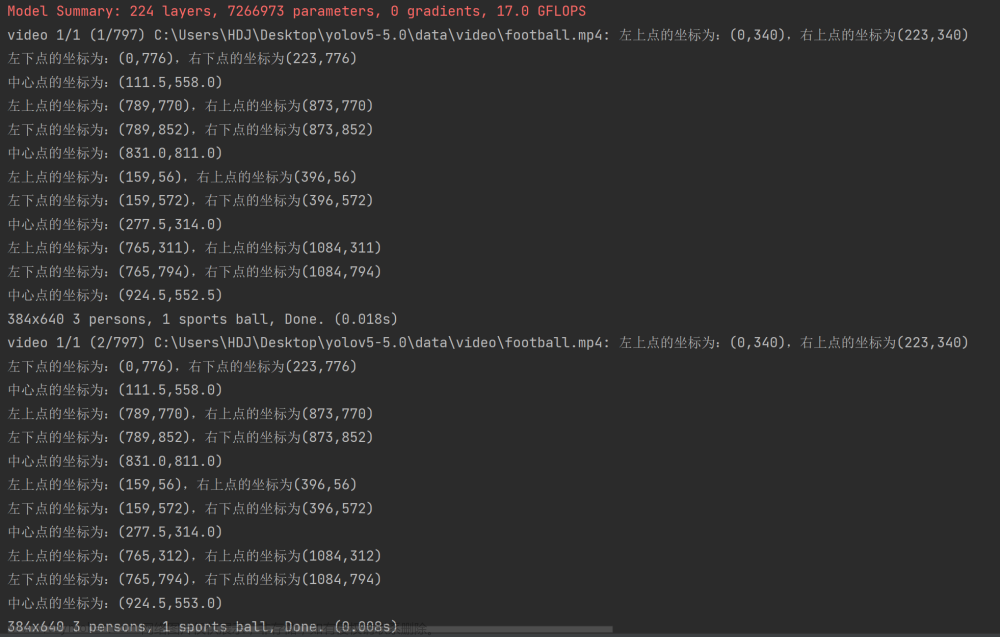
打印出视频中每一帧图片中目标位置。
单摄像头实时检测

在30FPS的帧率下打印出每一帧的目标位置。
多摄像头实时检测

在多线程识别时仍然能有效打印出坐标。文章来源:https://www.toymoban.com/news/detail-517877.html
求学路上,你我共勉(๑•̀ㅂ•́)و✧文章来源地址https://www.toymoban.com/news/detail-517877.html
到了这里,关于YOLOv5识别目标的实时坐标打印的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!