提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
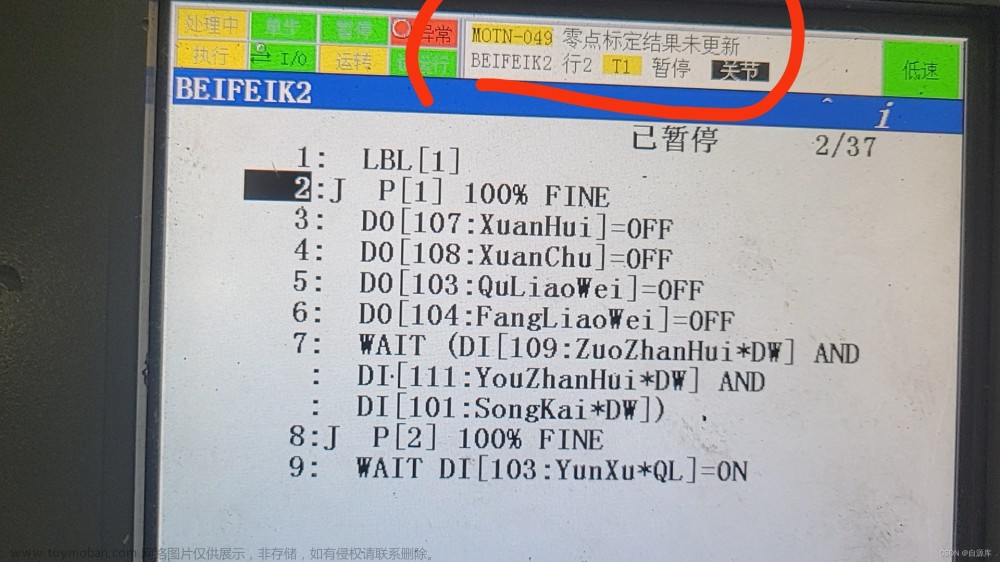
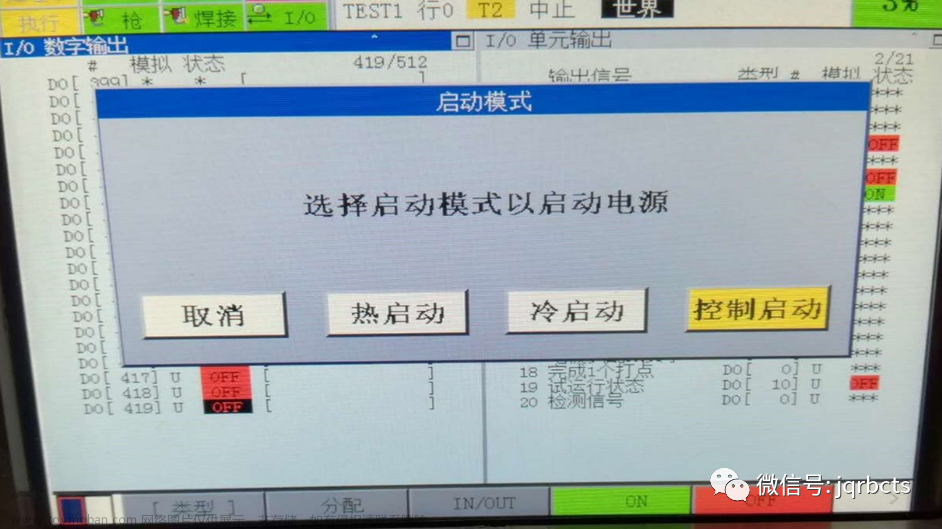
在电脑端发那科机器人仿真软件打开机器人的备份,来判断到底是那一台机器人的程序,模拟练习,消除故障,零点复归等操作提示:以下是本篇文章正文内容,下面案例可供参考
一、安装仿真软件FANUCROBOGUIDE
安装仿真软件前到电脑控制面板启用或关闭Windows功能,勾选 .net framework 3.5,否则安装失败,浪费时间。具体看软件要求,软件3.13GB,能用
链接:https://pan.baidu.com/s/1wVUH9M_jtBIOEFw1GdHXVA?pwd=p7fn
提取码:p7fn文章来源:https://www.toymoban.com/news/detail-518891.html
二、使用步骤
1.安装完仿真软件仿真运行已有的机器人备份,1.打开HandlingPRO→文件→新建工作单元→下一步→从备份创建,打开备份好的文件夹→选择后缀是.dt的文件,等一会选择结束,就好了,在打开软件中的示教器就和现实的示教器一样的操作方法,可以用来对比程序,模拟操作消除故障,修改动作等
总结
对于现场了解不深的小白,可以摸索消除已有的故障文章来源地址https://www.toymoban.com/news/detail-518891.html
到了这里,关于发那科机器人仿真软件FANUCROBOGUIDE打开机器备份的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!