目录
一、项目需求
二、方案设计
三、实物演示视频
四、原理图
五、PCB
六、代码
七、资料清单
资料下载地址:基于STM32的声控智能小车
一、项目需求
1.能够通过声音控制小车,小车具备语音识别功能;
2.小车实现加速、减速、转向以及前方避障功能;
3.能够根据设计路线自动行驶。
二、方案设计
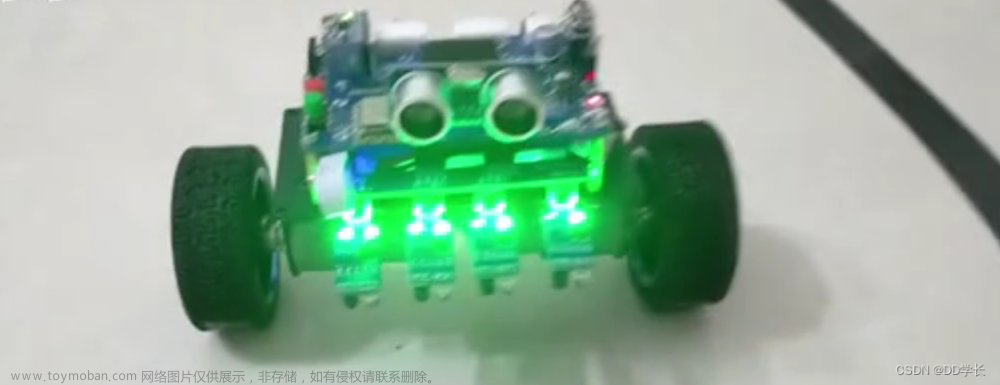
本课题采用STM32单片机作为主控芯片,结合语音识别技术、电机驱动技术等设计出了一款基于STM32单片机的智能机器人要车。系统通过STM32F103C6T6单片机作为主控芯片,采用ASR01语音识别模块进行语音识别,识别输出的指令输出给STM32单片机,通过L293D电机驱动芯片实现机器人小车的驱动控制,单片机根据接收到的指令对机器人实现“前进、后退、左转、右转”等功能的控制。同时系统通过超声波检测车头与障碍物的距离,当低于设定阈值时,系统自动控制小车作出绕行动作,实现避障。

三、实物演示视频
基于STM32的声控智能小车
基于STM32声控智能小车
四、原理图

五、PCB

六、代码
#include "main.h"
void Bluetooth_Config(uint32_t baud)
{
GPIO_InitTypeDef GPIO_InitStructure;// 定义一个GPIO_InitTypeDef类型的变量
USART_InitTypeDef USART_InitStructure;// 定义一个USART_InitTypeDef类型的变量
NVIC_InitTypeDef NVIC_InitStructure;
/* 允许GPIOA和USART1的时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* 配置USART1 */
/* 配置PA9(TXD) */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // 选择PIN9
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 50MHz速度
GPIO_Init(GPIOA, &GPIO_InitStructure);// 把参数带进函数配置
/* 配置PA10(RXD) */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;// 选择PIN10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;// 选择浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); // 把参数带进函数配置
/* 配置串口USART1的模式 */
USART_InitStructure.USART_BaudRate = baud; // 波特率9600
USART_InitStructure.USART_WordLength = USART_WordLength_8b;// 8个数据位
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 1个停止位
USART_InitStructure.USART_Parity = USART_Parity_No ; // 无奇偶校验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;// 无硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure); //把上面配置的参数带进函数里面初始化串口
/* 打开空闲中断 */
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);
/* 打开接收中断 */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
/* 配置NVIC优先级组 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
/* 允许UART1中断 */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_ClearFlag(USART1,USART_FLAG_TC);
USART_Cmd(USART1, ENABLE);// 打开串口1
}
uint8_t aRxBuffer[100];
uint8_t RxCounter=0;
uint8_t ReceiveState;
void USART1_IRQHandler(void)//串口1蓝牙接收
{
uint8_t Clear=Clear;
if(USART_GetITStatus(USART1,USART_IT_RXNE)!=RESET)
{
aRxBuffer[RxCounter++]=USART1->DR;
}
else
if(USART_GetITStatus(USART1,USART_IT_IDLE)!=RESET)
{
Clear=USART1->SR;
Clear=USART1->DR;
ReceiveState=1;;
}
}
// 发送一个字节
void USART1_Send_byte(uint8_t val)
{
USART_SendData(USART1, val);
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET); //等待发送完成
}
// 接收一个字节
uint8_t USART1_Recv_byte(void)
{
while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);
return USART_ReceiveData(USART1);
}
u8 car_zhiling=0;
u16 sd_value=0;
u32 JL=0;
int main()
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
RCC_Config();//时钟初始化
SystemInit();//初始化系统时钟为72MHZ
KEY_Init();
TIM3_PWM_Init();
CGQ_Init();
LED_Init();
LED1=LED2=LED3=1;
delay_init(); //延时函数初始化
Bluetooth_Config(9600);
xx=0;yy=3;zz=1;
Hcsr04Init();
while(1)
{
key_SMG();
//速度选择
if(yy==1) sd_value=750;
else
if(yy==2) sd_value=800;
else
if(yy==3) sd_value=850;
//控制执行
if(xx==1)
{ LED1=0;
//语音声控模式
if(zz==1)
{
LED2=1;LED3=0;
if(ReceiveState==1)//如果接收到1帧数据
{
ReceiveState=0;
// while(RxCounter--)// 把接收到数据发送回串口
// {
// USART_SendData(USART1, aRxBuffer[i++]);
// while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
// }
RxCounter=0;
if(aRxBuffer[0]==0)
{
car_zhiling=0;
}
if(aRxBuffer[0]==1)
{
car_zhiling=1;
}
if(aRxBuffer[0]==2)
{
car_zhiling=2;
}
if(aRxBuffer[0]==3)
{
car_zhiling=3;
}
if(aRxBuffer[0]==4)
{
car_zhiling=4;
}
}
//语音控制
if(car_zhiling==1)//前进
{
SetMotorVoltageAndDirection(sd_value,sd_value);
}else
if(car_zhiling==2)//后退
{
SetMotorVoltageAndDirection(-sd_value,-sd_value);
}
else
if(car_zhiling==3)//左转
{
SetMotorVoltageAndDirection(sd_value,0);
}
else
if(car_zhiling==4)//右转
{
SetMotorVoltageAndDirection(0,sd_value);
}
else
{
SetMotorVoltageAndDirection(0,0);
}
}
//红外寻迹模式
if(zz==2)
{
LED2=0;LED3=1;
//红外循迹模式:小车卡着黑线循迹行走
if(CG_Z1==0&&CG_Y1==0) //左右两个传感器都检测到黑线,小车执行停止
{
SetMotorVoltageAndDirection(sd_value,sd_value);
}
else
if(CG_Z1==1&&CG_Y1==1) //左右两个传感器都没有检测到黑线,小车执行前进
{
SetMotorVoltageAndDirection(0,0);
}
else
if(CG_Z1==0&&CG_Y1==1) //如果左传感器检测到黑线,表示小车车头偏左,为修正执行动作,小车执行右转的动作
{
SetMotorVoltageAndDirection(0,sd_value);
}
else
if(CG_Z1==1&&CG_Y1==0) //如果右传感器检测到黑线,表示小车车头偏右,为修正执行动作,小车执行左转的动作
{
SetMotorVoltageAndDirection(sd_value,0);
}
}
//自动避障模式
if(zz==3)
{
LED2=0;LED3=0;
JL=(uint32_t) Hcsr04GetLength();
if(JL>99) JL=99;
JL=JL%100;
//超声波避障模式
if(JL<30)
{
SetMotorVoltageAndDirection(-sd_value,-sd_value);
delay_ms(1000);
SetMotorVoltageAndDirection(0,sd_value);
delay_ms(1000);
}
else
{
SetMotorVoltageAndDirection(sd_value,sd_value);
}
}
}
else
{
LED1=LED2=LED3=1;
SetMotorVoltageAndDirection(0,0);
}
}
}
void RCC_Config(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//A3 A4 MOTORB
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//B0 B1 MOTORA
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC,ENABLE);//HC
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //定时器时钟 pwm 控制电机
}
七、资料清单
 文章来源:https://www.toymoban.com/news/detail-518896.html
文章来源:https://www.toymoban.com/news/detail-518896.html
文章来源地址https://www.toymoban.com/news/detail-518896.html
到了这里,关于基于STM32声控智能小车的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!