Flight Stand 50测试台通过测量电机和螺旋桨的拉力、扭矩、转速、电流、电压、温度、螺旋桨效率和电机效率来精准地描述和评估无人机动力系统的性能。

产品应用
Flight Stand 50测试台可以用于以下方向:
- 实时动态测试
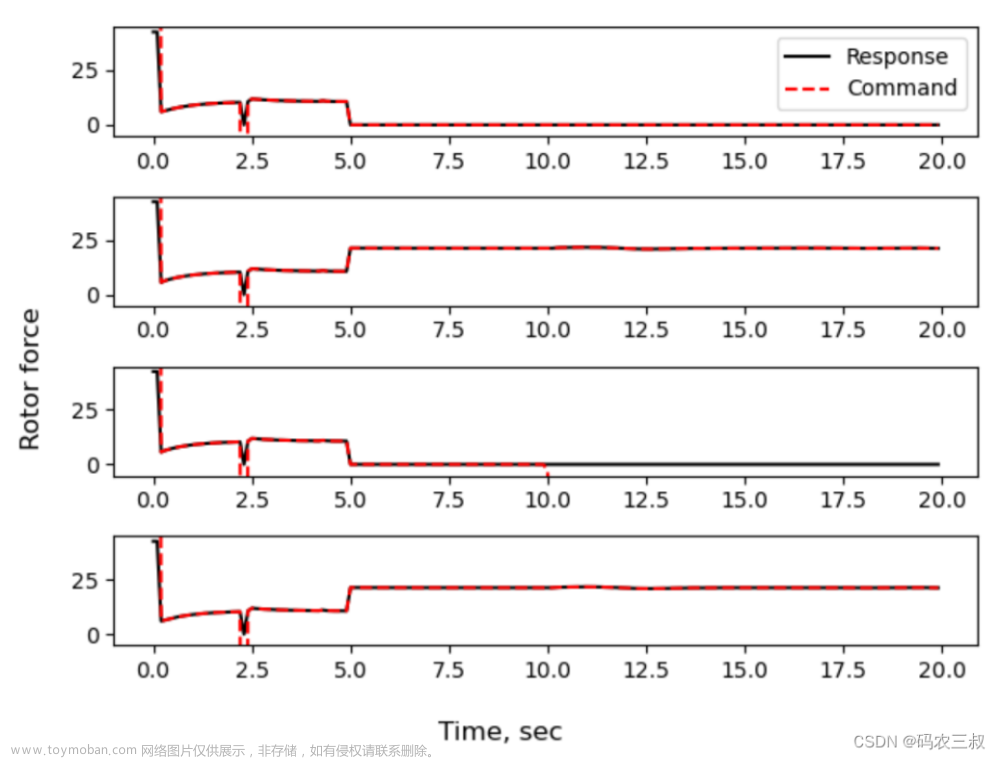
FS50 Pro的1000 Hz采样率使测试成为可能,支持执行频率和步进输入参数识别。
- 飞控数据回放测试
将飞行控制器数据上传到软件中,在动力系统连接到测试台后重新创建油门输入。
- 效率和功率特性测试
测量电机、螺旋桨和整个系统的效率,并比较电力输入和机械输出的对应关系。
- 耐久性和可靠性测试
使用自定义设计的自动化测试脚本来研究无人机系统组件的耐久性。我们用户友好的脚本界面允许您轻松编程进行步进测试,斜坡测试,飞行回放测试,或提出的其他相关通讯协议。
- 分布式电推进动力系统(DEP)测试
支持同时测试多达8个动力系统,帮助全面了解您多旋翼无人机的技术性能,支持单独记录每个独立的动力系统以及整体系统记录分析。
技术亮点
Flight Stand 50测试台出色地对无人机动力系统进行优化:
- 无摩擦测量
测试台采用测量拉力和扭矩的全固态形变测量技术,测量期间电机和测压元件之间没有任何移动部件。相比轴承和铰链结构在测量过程中极易产生摩擦和错位的影响,全固态测量极大增强了测量数据的一致精准性。
- ASTM校准
我们的Pro测试台采用ASTM标准校准,以确保最大的测量精度。拉力采用211点ASTM E74程序校准,扭矩采用213点ASTM E2428程序校准。
- 极致精巧外观设计
专用于空气动力学测试并将测试台和布线的气流干扰降至最低限度,极致还原测量无人机最真实的飞行条件。
- 真实共轴双电机测试
支持3种以上共轴双旋翼无人机设计方案的动力系统测试,其中背靠背测试方案待测电机之间的距离仅为91毫米,真实再现共轴多旋翼无人机设计。
- 操作软件功能强大
无需编程支持手动或自动测试,同时提供Python API和数据管理系统,具有索引、图、表、过滤和重采样功能。
- 卓越的客户支持
我们团队随时准备以友好的方式回答并帮助解决您可能遇到的任何问题。
测试台软件
通过操作软件控制测试台并记录数据。用户可以滑动油门手动控制测试台,或使用预先设定油门值的表格 .CSV文件或Python API自动执行测试。
 文章来源:https://www.toymoban.com/news/detail-518906.html
文章来源:https://www.toymoban.com/news/detail-518906.html
文章来源地址https://www.toymoban.com/news/detail-518906.html
到了这里,关于无人机动力测试台-50公斤级-Flight Stand 50的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!