ABB机器人将程序模块单个或批量导入控制器的具体方法和步骤

在一个项目中,有可能会需要多个模块和程序文件,如果都是使用示教器来建立或编程,不是太方便且耗费时间较长。
| 通过RobotStudio可以单个/批量加载程序模块和参数。 |
具体的方法和步骤可参考以下内容:
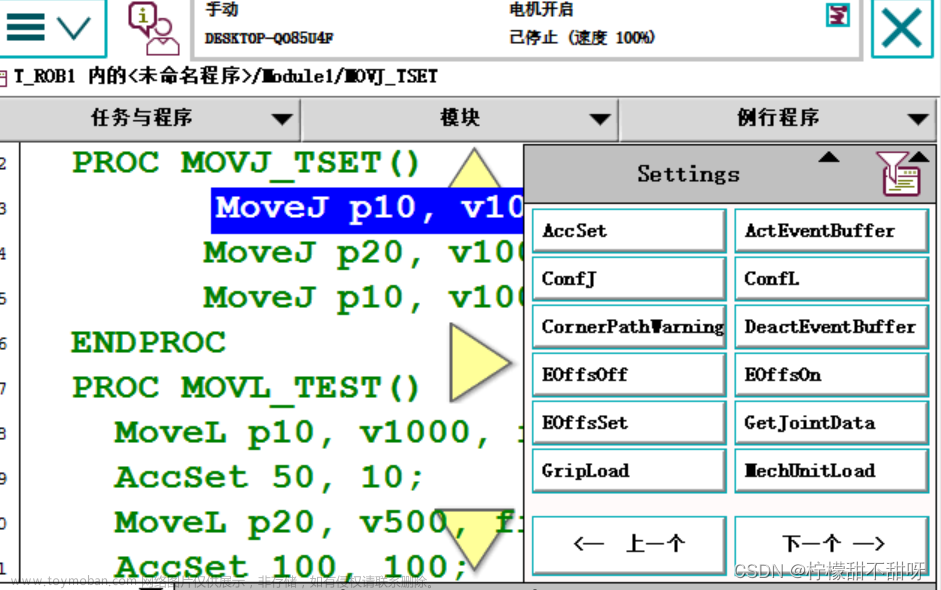
如下图所示,我们在电脑上创建一个离线的工作站项目,并创建了程序模块和例行程序,
为了避免出现意外,在向机器人控制器导入程序模块之前,我们先对当前的系统进行备份, 文章来源:https://www.toymoban.com/news/detail-519082.html
文章来源:https://www.toymoban.com/news/detail-519082.html
| 备份的名称不允许有中文, |
 文章来源地址https://www.toymoban.com/news/detail-519082.html
文章来源地址https://www.toymoban.com/news/detail-519082.html
| 与机器人控制器进行联机: |
到了这里,关于ABB机器人将程序模块单个或批量导入控制器的具体方法和步骤的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!