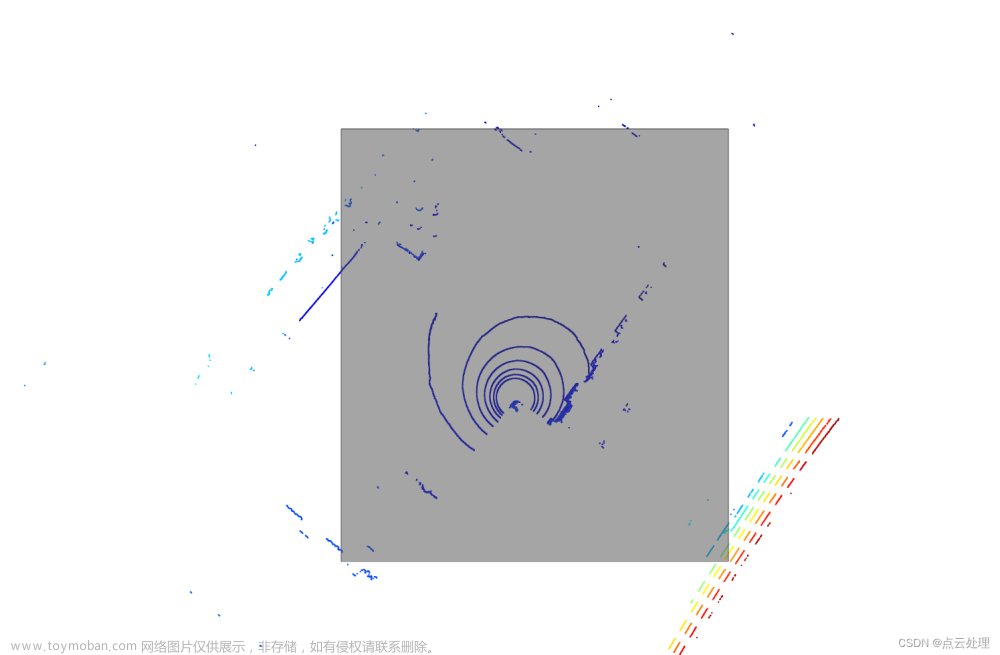
通过计算每个点的梯度来找到边缘点,类似图像中找图像轮廓的方法
对于简化后续计算步骤,或者提取点云特征都比较有用
结果如下图;

文章来源:https://www.toymoban.com/news/detail-519096.html
代码如下:文章来源地址https://www.toymoban.com/news/detail-519096.html
# -*-coding:utf-8 -*-
import numpy as np
import open3d as o3d
import time
class Edge3DCentroid:
def __init__(self):
"""
Init parameters
"""
self.pcd = None # input point clouds
self.NPt = 0 # input point cloud number
# self.Rnn = 0.12 # r-neighbour sqrt(0.015), R-neighbour
self.Rnn = 1 # r-neighbour sqrt(0.015), R-neighbour
self.EI = None # Save point-wise edge-index
self.GOrt = None # Grid-wise max-orientation
self.Neighbours = None # Neighbour system
self.MaxNN 到了这里,关于点云边缘获取并可视化(附open3d python代码)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!