最近使用到了这个2.4G无线模块NRF24L01,比蓝牙好用,需要同时使用两个来用,它长这样:
使用它需要代码支持,因此我在耗费了一些精力后,从网上东拼西凑了一些代码,修修补补后使它能够正常运行,注意:我只测试了两个2.4G无线模块NRF24L01的连接。
下图是2.4G无线模块NRF24L01的引脚连线图,我使用的是SPI 2。
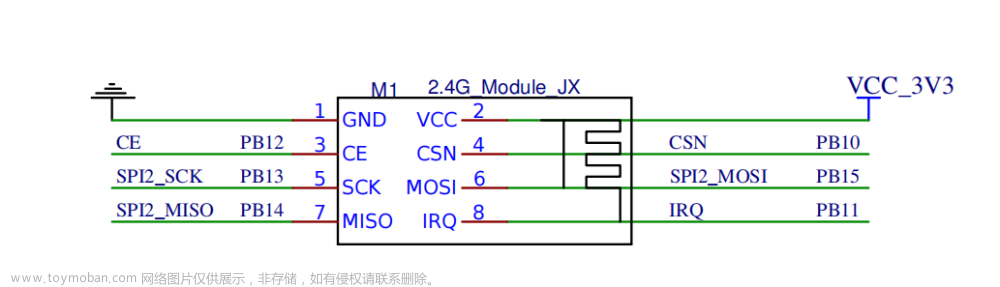
下面是SPI2的代码配置:
SPI.c
#include "spi.h"
// SPI2初始化
//---------------------------------------------------------------------------------------------------------------
void SPI2_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE ); // GPIOB时钟使能
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE ); // SPI2时钟使能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // PB13/14/15复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure); // 初始化GPIOB
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15); // PB13/14/15上拉
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; // SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; // SPI主机
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; // 发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; // 时钟悬空低
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; // 数据捕获于第1个时钟沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; // NSS信号由软件控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_16; // 定义波特率预分频的值:波特率预分频值为16
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; // 数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; // CRC值计算的多项式
SPI_Init(SPI2, &SPI_InitStructure);
SPI_Cmd(SPI2, ENABLE); // 使能SPI外设
SPI2_ReadWriteByte(0xFF); // 启动传输
}
//---------------------------------------------------------------------------------------------------------------
// 设置SPI速度
//---------------------------------------------------
// SPI_DivideFrequency_2 2分频: 18MHz
// SPI_DivideFrequency_4 4分频: 9MHz
// SPI_DivideFrequency_8 8分频: 4.5MHz
// SPI_DivideFrequency_16 16分频:2.25MHz
void SPI2_SetSpeed(u8 SPI_DivideFrequency)
{
SPI2->CR1&=0XFFC7;
SPI2->CR1|=SPI_DivideFrequency; //设置SPI2速度
//SPI_Cmd(SPI2,ENABLE);
}
//---------------------------------------------------
// SPI读写一个字节
// TxData:要写入的字节
// 返回值:读取到的字节
//-----------------------------------------------------------------------
u8 SPI2_ReadWriteByte(u8 TxData)
{
u8 TxWait = 0;
u8 RxWait = 0;
// 等待发送缓存为空
while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET)
{
TxWait++;
if(TxWait>250) // 等待时间过长则放弃本次读写
return 0;
}
SPI_I2S_SendData(SPI2, TxData); // SPI2写一个字节
// 等待接收缓存为空
while (SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET)
{
RxWait++;
if(RxWait>250) // 等待时间过长则放弃本次读写
return 0;
}
return SPI_I2S_ReceiveData(SPI2); // 将读到的字节返回
}
//-----------------------------------------------------------------------
SPI.h
#ifndef __SPI_H
#define __SPI_H
#include "sys.h"
void SPI2_Init(void); //初始化SPI口
void SPI2_SetSpeed(u8 SpeedSet); //设置SPI速度
u8 SPI2_ReadWriteByte(u8 TxData);//SPI总线读写一个字节
#endif
24l01.c
#include "24l01.h"
#include "delay.h"
#include "spi.h"
#include "stm32f10x.h" // Device header
/******NRF24L01引脚连接******/
#define NRF24L01_GPIO_PIN_CE GPIO_Pin_12
#define NRF24L01_GPIO_PIN_CSN GPIO_Pin_10
#define NRF24L01_GPIO_PIN_IRQ GPIO_Pin_11
/*还需修改"24l01.h"第49-51行*/
/***************************/
const u8 TX_ADDRESS[TX_ADR_WIDTH]={0x34,0x43,0x10,0x10,0x01}; //发送地址
const u8 RX_ADDRESS[RX_ADR_WIDTH]={0x34,0x43,0x10,0x10,0x01};
//初始化24L01的IO口
void NRF24L01_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB端口时钟
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = NRF24L01_GPIO_PIN_CE | NRF24L01_GPIO_PIN_CSN; // CE CSN
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = NRF24L01_GPIO_PIN_IRQ; // IRQ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_12 | GPIO_Pin_10);
SPI2_Init(); //初始化SPI
NRF24L01_CE=0; //使能24L01
NRF24L01_CSN=1; //SPI片选取消
}
//检测24L01是否存在
//返回值:0,成功;
// 1,失败
u8 NRF24L01_Check(void)
{
u8 buf[5]={0XA5,0XA5,0XA5,0XA5,0XA5};
u8 i;
SPI2_SetSpeed(SPI_BaudRatePrescaler_4); //spi速度为9Mhz(24L01的最大SPI时钟为10Mhz)
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,buf,5);//写入5个字节的地址.
NRF24L01_Read_Buf(TX_ADDR,buf,5); //读出写入的地址
for(i=0;i<5;i++)if(buf[i]!=0XA5)break;
if(i!=5)return 1;//检测24L01错误
return 0; //检测到24L01
}
//SPI写寄存器
//reg:指定寄存器地址
//value:写入的值
u8 NRF24L01_Write_Reg(u8 reg,u8 value)
{
u8 status;
NRF24L01_CSN=0; //使能SPI传输
status =SPI2_ReadWriteByte(reg);//发送寄存器号
SPI2_ReadWriteByte(value); //写入寄存器的值
NRF24L01_CSN=1; //禁止SPI传输
return(status); //返回状态值
}
//读取SPI寄存器值
//reg:要读的寄存器
u8 NRF24L01_Read_Reg(u8 reg)
{
u8 reg_val;
NRF24L01_CSN = 0; //使能SPI传输
SPI2_ReadWriteByte(reg); //发送寄存器号
reg_val=SPI2_ReadWriteByte(0XFF);//读取寄存器内容
NRF24L01_CSN = 1; //禁止SPI传输
return(reg_val); //返回状态值
}
//在指定位置读出指定长度的数据
//reg:寄存器(位置)
//*pBuf:数据指针
//len:数据长度
//返回值,此次读到的状态寄存器值
u8 NRF24L01_Read_Buf(u8 reg,u8 *pBuf,u8 len)
{
u8 status,u8_ctr;
NRF24L01_CSN = 0; //使能SPI传输
status=SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态值
for(u8_ctr=0;u8_ctr<len;u8_ctr++)pBuf[u8_ctr]=SPI2_ReadWriteByte(0XFF);//读出数据
NRF24L01_CSN=1; //关闭SPI传输
return status; //返回读到的状态值
}
//在指定位置写指定长度的数据
//reg:寄存器(位置)
//*pBuf:数据指针
//len:数据长度
//返回值,此次读到的状态寄存器值
u8 NRF24L01_Write_Buf(u8 reg, u8 *pBuf, u8 len)
{
u8 status,u8_ctr;
NRF24L01_CSN = 0; //使能SPI传输
status = SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态值
for(u8_ctr=0; u8_ctr<len; u8_ctr++)SPI2_ReadWriteByte(*pBuf++); //写入数据
NRF24L01_CSN = 1; //关闭SPI传输
return status; //返回读到的状态值
}
//启动NRF24L01发送一次数据
//txbuf:待发送数据首地址
//返回值:发送完成状况
u8 NRF24L01_TxPacket(u8 *txbuf)
{
u8 sta;
SPI2_SetSpeed(SPI_BaudRatePrescaler_8);//spi速度为9Mhz(24L01的最大SPI时钟为10Mhz)
NRF24L01_CE=0;
NRF24L01_Write_Buf(WR_TX_PLOAD,txbuf,TX_PLOAD_WIDTH);//写数据到TX BUF 32个字节
NRF24L01_CE=1;//启动发送
while(NRF24L01_IRQ!=0);//等待发送完成
sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,sta); //清除TX_DS或MAX_RT中断标志
if(sta&MAX_TX)//达到最大重发次数
{
NRF24L01_Write_Reg(FLUSH_TX,0xff);//清除TX FIFO寄存器
return MAX_TX;
}
if(sta&TX_OK)//发送完成
{
return TX_OK;
}
return 0xff;//其他原因发送失败
}
//启动NRF24L01发送一次数据
//txbuf:待发送数据首地址
//返回值:0,接收完成;其他,错误代码
u8 NRF24L01_RxPacket(u8 *rxbuf)
{
u8 sta;
SPI2_SetSpeed(SPI_BaudRatePrescaler_8); //spi速度为9Mhz(24L01的最大SPI时钟为10Mhz)
sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,sta); //清除TX_DS或MAX_RT中断标志
if(sta&RX_OK)//接收到数据
{
NRF24L01_Read_Buf(RD_RX_PLOAD,rxbuf,RX_PLOAD_WIDTH);//读取数据
NRF24L01_Write_Reg(FLUSH_RX,0xff);//清除RX FIFO寄存器
return 0;
}
return 1;//没收到任何数据
}
//该函数初始化NRF24L01到RX模式
//设置RX地址,写RX数据宽度,选择RF频道,波特率和LNA HCURR
//当CE变高后,即进入RX模式,并可以接收数据了
void NRF24L01_RX_Mode(void)
{
NRF24L01_CE=0;
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH);//写RX节点地址
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01);//使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置RF通信频率
NRF24L01_Write_Reg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);//选择通道0的有效数据宽度
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f);//设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG, 0x0f);//配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式
NRF24L01_CE = 1; //CE为高,进入接收模式
}
//该函数初始化NRF24L01到TX模式
//设置TX地址,写TX数据宽度,设置RX自动应答的地址,填充TX发送数据,选择RF频道,波特率和LNA HCURR
//PWR_UP,CRC使能
//当CE变高后,即进入RX模式,并可以接收数据了
//CE为高大于10us,则启动发送.
void NRF24L01_TX_Mode(void)
{
NRF24L01_CE=0;
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(u8*)TX_ADDRESS,TX_ADR_WIDTH);//写TX节点地址
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH); //设置TX节点地址,主要为了使能ACK
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道0的自动应答
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01); //使能通道0的接收地址
NRF24L01_Write_Reg(NRF_WRITE_REG+SETUP_RETR,0x1a);//设置自动重发间隔时间:500us + 86us;最大自动重发次数:10次
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置RF通道为40
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f); //设置TX发射参数,0db增益,2Mbps,低噪声增益开启
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG,0x0e); //配置基本工作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式,开启所有中断
NRF24L01_CE=1;//CE为高,10us后启动发送
}
24l01.h
#ifndef __24L01_H
#define __24L01_H
#include "sys.h"
//
//NRF24L01寄存器操作命令
#define NRF_READ_REG 0x00 //读配置寄存器,低5位为寄存器地址
#define NRF_WRITE_REG 0x20 //写配置寄存器,低5位为寄存器地址
#define RD_RX_PLOAD 0x61 //读RX有效数据,1~32字节
#define WR_TX_PLOAD 0xA0 //写TX有效数据,1~32字节
#define FLUSH_TX 0xE1 //清除TX FIFO寄存器.发射模式下用
#define FLUSH_RX 0xE2 //清除RX FIFO寄存器.接收模式下用
#define REUSE_TX_PL 0xE3 //重新使用上一包数据,CE为高,数据包被不断发送.
#define NOP 0xFF //空操作,可以用来读状态寄存器
//SPI(NRF24L01)寄存器地址
#define CONFIG 0x00 //配置寄存器地址;bit0:1接收模式,0发射模式;bit1:电选择;bit2:CRC模式;bit3:CRC使能;
//bit4:中断MAX_RT(达到最大重发次数中断)使能;bit5:中断TX_DS使能;bit6:中断RX_DR使能
#define EN_AA 0x01 //使能自动应答功能 bit0~5,对应通道0~5
#define EN_RXADDR 0x02 //接收地址允许,bit0~5,对应通道0~5
#define SETUP_AW 0x03 //设置地址宽度(所有数据通道):bit1,0:00,3字节;01,4字节;02,5字节;
#define SETUP_RETR 0x04 //建立自动重发;bit3:0,自动重发计数器;bit7:4,自动重发延时 250*x+86us
#define RF_CH 0x05 //RF通道,bit6:0,工作通道频率;
#define RF_SETUP 0x06 //RF寄存器;bit3:传输速率(0:1Mbps,1:2Mbps);bit2:1,发射功率;bit0:低噪声放大器增益
#define STATUS 0x07 //状态寄存器;bit0:TX FIFO满标志;bit3:1,接收数据通道号(最大:6);bit4,达到最多次重发
//bit5:数据发送完成中断;bit6:接收数据中断;
#define MAX_TX 0x10 //达到最大发送次数中断
#define TX_OK 0x20 //TX发送完成中断
#define RX_OK 0x40 //接收到数据中断
#define OBSERVE_TX 0x08 //发送检测寄存器,bit7:4,数据包丢失计数器;bit3:0,重发计数器
#define CD 0x09 //载波检测寄存器,bit0,载波检测;
#define RX_ADDR_P0 0x0A //数据通道0接收地址,最大长度5个字节,低字节在前
#define RX_ADDR_P1 0x0B //数据通道1接收地址,最大长度5个字节,低字节在前
#define RX_ADDR_P2 0x0C //数据通道2接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;
#define RX_ADDR_P3 0x0D //数据通道3接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;
#define RX_ADDR_P4 0x0E //数据通道4接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;
#define RX_ADDR_P5 0x0F //数据通道5接收地址,最低字节可设置,高字节,必须同RX_ADDR_P1[39:8]相等;
#define TX_ADDR 0x10 //发送地址(低字节在前),ShockBurstTM模式下,RX_ADDR_P0与此地址相等
#define RX_PW_P0 0x11 //接收数据通道0有效数据宽度(1~32字节),设置为0则非法
#define RX_PW_P1 0x12 //接收数据通道1有效数据宽度(1~32字节),设置为0则非法
#define RX_PW_P2 0x13 //接收数据通道2有效数据宽度(1~32字节),设置为0则非法
#define RX_PW_P3 0x14 //接收数据通道3有效数据宽度(1~32字节),设置为0则非法
#define RX_PW_P4 0x15 //接收数据通道4有效数据宽度(1~32字节),设置为0则非法
#define RX_PW_P5 0x16 //接收数据通道5有效数据宽度(1~32字节),设置为0则非法
#define NRF_FIFO_STATUS 0x17 //FIFO状态寄存器;bit0,RX FIFO寄存器空标志;bit1,RX FIFO满标志;bit2,3,保留
//bit4,TX FIFO空标志;bit5,TX FIFO满标志;bit6,1,循环发送上一数据包.0,不循环;
//
//24L01操作线
#define NRF24L01_CE PBout(12) //24L01片选信号
#define NRF24L01_CSN PBout(10) //SPI片选信号
#define NRF24L01_IRQ PBin(11) //IRQ主机数据输入
//24L01发送接收数据宽度定义
#define TX_ADR_WIDTH 5 //5字节的地址宽度
#define RX_ADR_WIDTH 5 //5字节的地址宽度
#define TX_PLOAD_WIDTH 32 //32字节的用户数据宽度
#define RX_PLOAD_WIDTH 32 //32字节的用户数据宽度
void NRF24L01_Init(void); //初始化
void NRF24L01_RX_Mode(void); //配置为接收模式
void NRF24L01_TX_Mode(void); //配置为发送模式
u8 NRF24L01_Write_Buf(u8 reg, u8 *pBuf, u8 u8s);//写数据区
u8 NRF24L01_Read_Buf(u8 reg, u8 *pBuf, u8 u8s); //读数据区
u8 NRF24L01_Read_Reg(u8 reg); //读寄存器
u8 NRF24L01_Write_Reg(u8 reg, u8 value); //写寄存器
u8 NRF24L01_Check(void); //检查24L01是否存在
u8 NRF24L01_TxPacket(u8 *txbuf); //发送一个包的数据
u8 NRF24L01_RxPacket(u8 *rxbuf); //接收一个包的数据
#endif
这是主函数
#include "stm32f10x.h" // Device header
#include "OLED.h"
#include "sys.h"
#include "delay.h"
#include "spi.h"
#include "24l01.h"
int main(void)
{
u8 tmp_buf[33]; //初始化要发送的数据
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(); //初始化延时函数
OLED_Init(); //初始化OLED
OLED_ShowString(1,1,"OLED_OK");
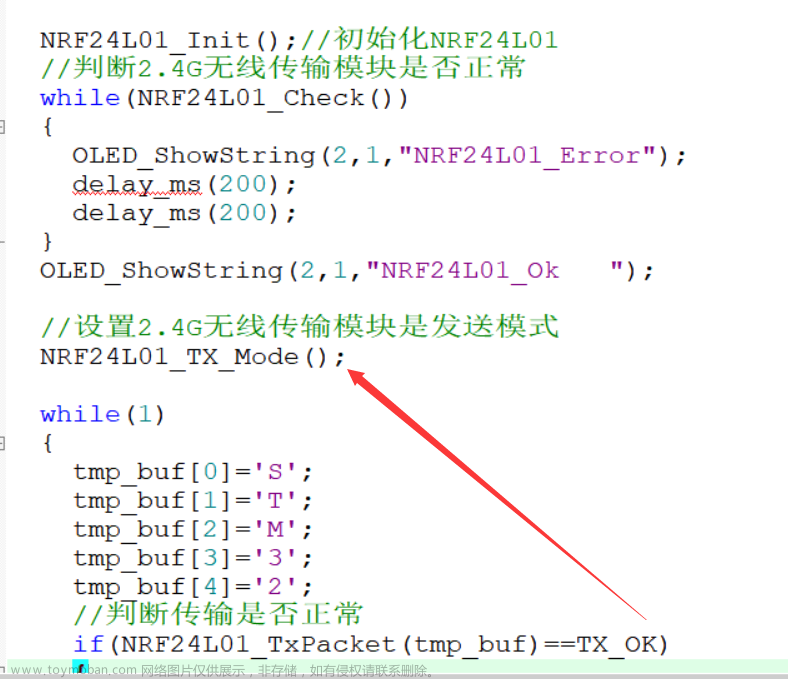
NRF24L01_Init();//初始化NRF24L01
//判断2.4G无线传输模块是否正常
while(NRF24L01_Check())
{
OLED_ShowString(2,1,"NRF24L01_Error");
delay_ms(200);
delay_ms(200);
}
OLED_ShowString(2,1,"NRF24L01_Ok ");
//设置2.4G无线传输模块是发送模式
NRF24L01_TX_Mode();
while(1)
{
tmp_buf[0]='S';
tmp_buf[1]='T';
tmp_buf[2]='M';
tmp_buf[3]='3';
tmp_buf[4]='2';
//判断传输是否正常
if(NRF24L01_TxPacket(tmp_buf)==TX_OK)
{
OLED_ShowString(3,1,"TX_OK ");
}
else OLED_ShowString(3,1,"TX_ERR");
delay_ms(100);
OLED_ShowString(3,1," ");
}
}
其中的sys文件用的stm32f10x的。
我简单解释一下


这里改一下,就能接收数据文章来源:https://www.toymoban.com/news/detail-519516.html

最后测试成功:文章来源地址https://www.toymoban.com/news/detail-519516.html

到了这里,关于STM32F103C8T6与2.4G无线模块NRF24L01连接的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!


![[STM32F103C8T6]ADC转换](https://imgs.yssmx.com/Uploads/2024/02/458238-1.png)