文章来源:https://www.toymoban.com/news/detail-520388.html
文章来源:https://www.toymoban.com/news/detail-520388.html


数据发送 文章来源地址https://www.toymoban.com/news/detail-520388.html
文章来源地址https://www.toymoban.com/news/detail-520388.html
#include "IIC.h"
#include "delay.h"
void IIC_Init(void){
GPIO_InitTypeDef GPIO_InitStruct;
//使能GPIPF
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
//初始GPIGB8 GPIGB9
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9; //引脚9
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //输出
GPIO_InitStruct.GPIO_OType = GPIO_OType_OD; //开漏输出
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //速度
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOB,&GPIO_InitStruct);
//初始化总线->空闲状态
SDA_OUTPUT();
SCL = 1;
SDA_OUT = 1;
}
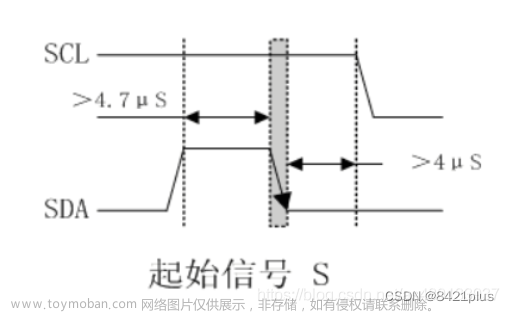
void IIC_Start(void){
//输出模式
SDA_OUTPUT();
//1.总线空闲
SDA_OUT = 1;
SCL = 1;
delay_us(5);
//2.SDA电平跳变 H -> L
SDA_OUT = 0;
delay_us(5);
//3.占据时钟总线
SCL = 0;
}
void IIC_Stop(void){
//输出模式
SDA_OUTPUT();
//1.钳住总线同时SDA为零
SDA_OUT = 0;
SCL = 0;
delay_us(5);
//2.SCL、SDA电平跳变 L -> H
SCL = 1;
SDA_OUT = 1;
delay_us(5);
}
void IIC_Write_Byte(u8 data){
int i = 7;
//输出模式
SDA_OUTPUT();
//一个字节八位,循环八次
SCL = 0;
for(; i >= 0; i--){
SCL = 0;
//判断当前数据位:高位在前、低位在后
if((data & (1<<i))){
SDA_OUT = 1;
}
else{
SDA_OUT = 0;
}
delay_us(5); //此处不知道为什么要延时 1.构成脉冲周期
SCL = 1;
delay_us(5);
//3.钳住总线
SCL = 0;
}
//3.占据时钟总线,释放数据总线
SCL = 0;
SDA_OUT = 1;
}
u8 IIC_Read_Byte(void){
u8 data = 0;
int i = 7;
//输入模式
SDA_INPUT();
//一个字节八位,循环八次
SCL = 0;
for(; i >= 0; i--){
//低电平准备数据
delay_us(5);
//判断当前数据位:高位在前、低位在后
SCL = 1;
if(SDA_IN){
data |= (1 << i);
}
delay_us(5);
//3.钳住总线
SCL = 0;
}
//4.占据时钟总线,释放数据总线
SCL = 0;
SDA_OUT = 1;
return data;
}
u8 IIC_Wait_Ack(void){
u8 ask = 0;
//输入模式
SDA_INPUT();
//1.准备ask
SCL = 0;
delay_us(5);
//2.读取ASK
SCL = 1;
if(SDA_IN == 1){
ask = 1;
}
else ask = 0;
delay_us(5);
//3.占据时钟总线,释放数据总线
SCL = 0;
SDA_OUT = 1;
return ask;
}
void IIC_Send_Ack(void){
//输出模式
SDA_OUTPUT();
//1.准备数据
SCL = 0;
SDA_OUT = 0;
delay_us(5);
//2.发送ASK
SCL = 1;
delay_us(10);
//3.占据时钟总线,释放数据总线
SCL = 0;
SDA_OUT = 1;
}
void IIC_Send_NAck(void){
//输出模式
SDA_OUTPUT();
//1.准备数据
SCL = 0;
SDA_OUT = 1;
delay_us(5);
//2.发送NASK
SCL = 1;
delay_us(5);
//3.占据时钟总线,释放数据总线
SCL = 0;
SDA_OUT = 1;
}
到了这里,关于stm32-iic 时序驱动的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!