一、主要功能
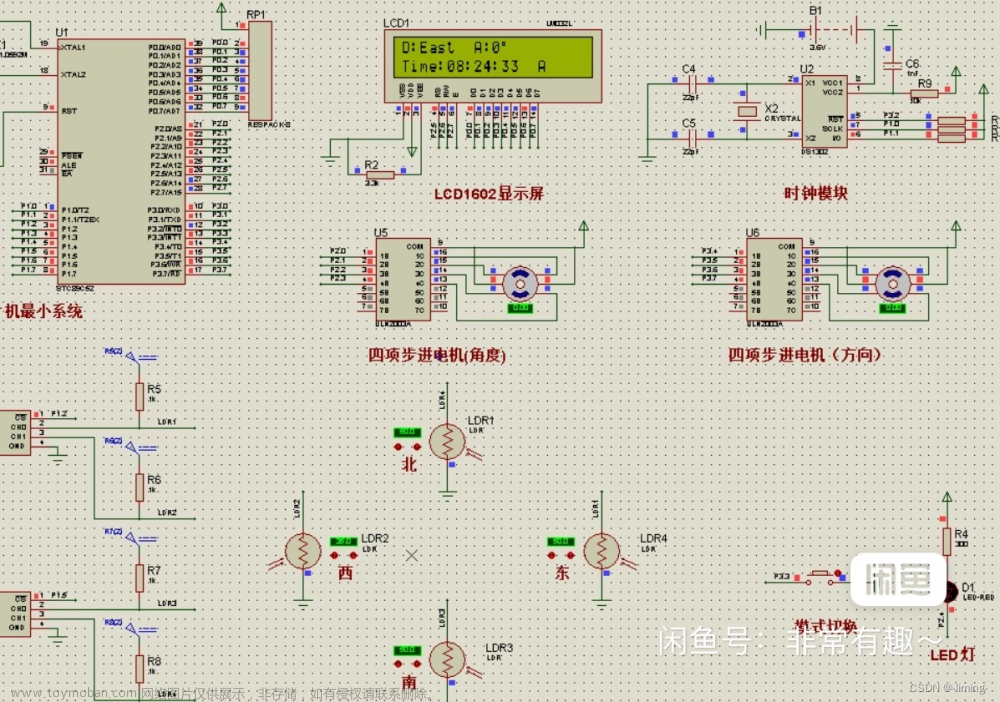
本项目使用Proteus8仿真51单片机控制器,使用ULN2003电机模块、LCD1602模块、按键模块等。
主要功能:
系统运行后,LCD1602显示电机当前运行档位、方向、状态。 可通过按键K4启动与停止,按键K1加速、按键K2减速,按键K3换向;档位可在1-5挡。
最终可实现:
按键功能:具有加速、减速、正转、反转、启动和停止;
显示功能:LCD1602显示档位、方向、运行状态;
电机驱动:ULN2003驱动步进电机;
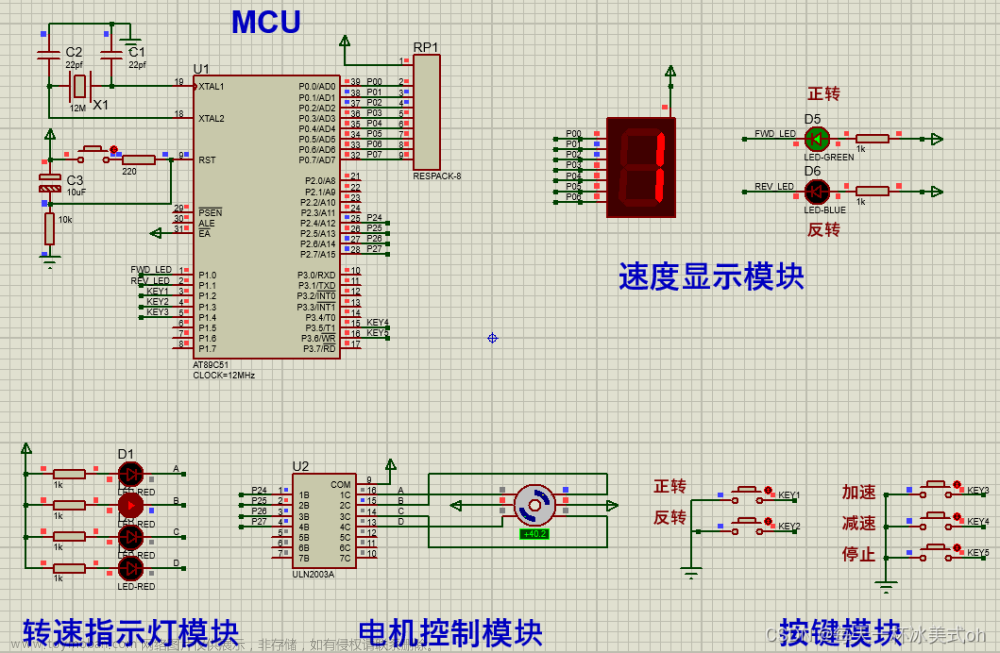
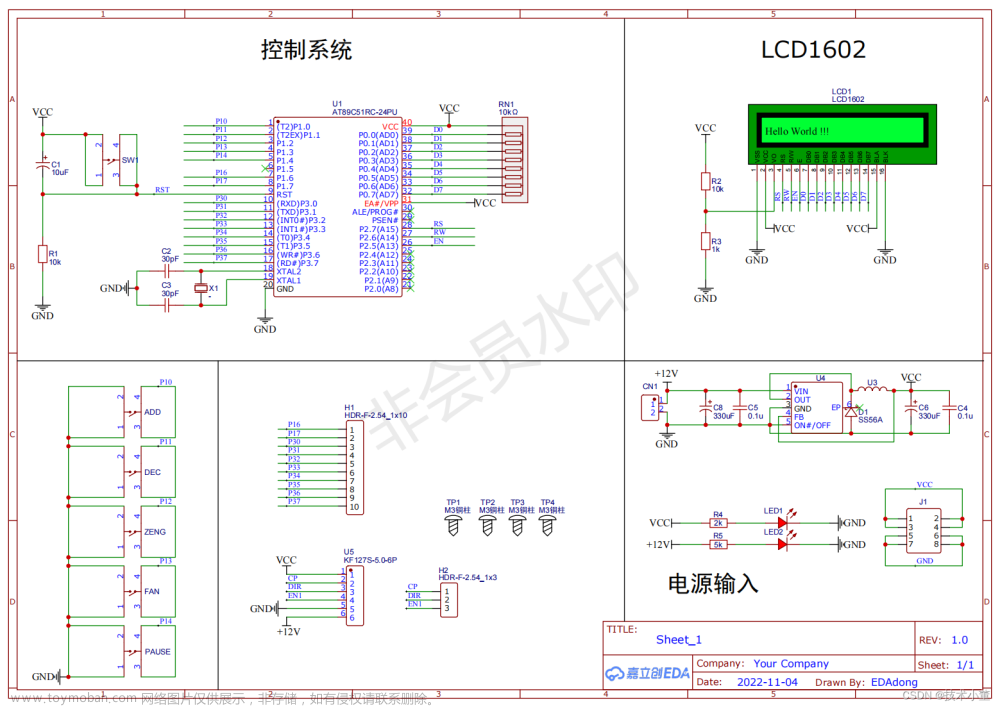
二、硬件资源
1、51单片机核心模块
2、ULN2003电机驱动模块
3、LCD1602显示模块
4、按键模块
三、软件设计
/*
作者:嗨小易(QQ:3443792007)
*/
//定义结构体
_sys_ctrl sys_ctrl;
//档位对应的控制速度
u8 gspeed[5]={140,100,80,60,50};
//系统参数设定
void sys_parm_set(void)
{
u8 key=0;
key=key_scan(0);
//启动/停止
if(key==KEY4_PRESS)
{
sys_ctrl.run=!sys_ctrl.run;
if(sys_ctrl.run)
lcd1602_show_string(4,1,"RUN ");
else
lcd1602_show_string(4,1,"STOP");
}
//运行中
if(sys_ctrl.run)
{
//方向切换
if(key==KEY3_PRESS)
{
sys_ctrl.dir=!sys_ctrl.dir;
}
//加速
else if(key==KEY1_PRESS)
{
sys_ctrl.gear++;
if(sys_ctrl.gear>5)sys_ctrl.gear=1;
}
//减速
else if(key==KEY2_PRESS)
{
sys_ctrl.gear--;
if(sys_ctrl.gear<1)sys_ctrl.gear=5;
}
step_motor_28BYJ48_send_pulse(4,sys_ctrl.dir,gspeed[sys_ctrl.gear-1],1,sys_ctrl.run);
}
}
//系统参数显示
void sys_parm_show(void)
{
//运行状态
if(sys_ctrl.run)
{
if(sys_ctrl.dir)lcd1602_show_string(14,0,"ZZ");
else lcd1602_show_string(14,0,"FZ");
//档位显示
lcd1602_show_num(5,0,sys_ctrl.gear,1);
}
}
//应用控制系统
void appdemo_show(void)
{
sys_parm_init();//系统参数初始化
time1_init();
lcd1602_init();//LCD1602初始化
sys_open_show();//系统初始界面显示
while(1)
{
sys_parm_set();
sys_parm_show();
}
}
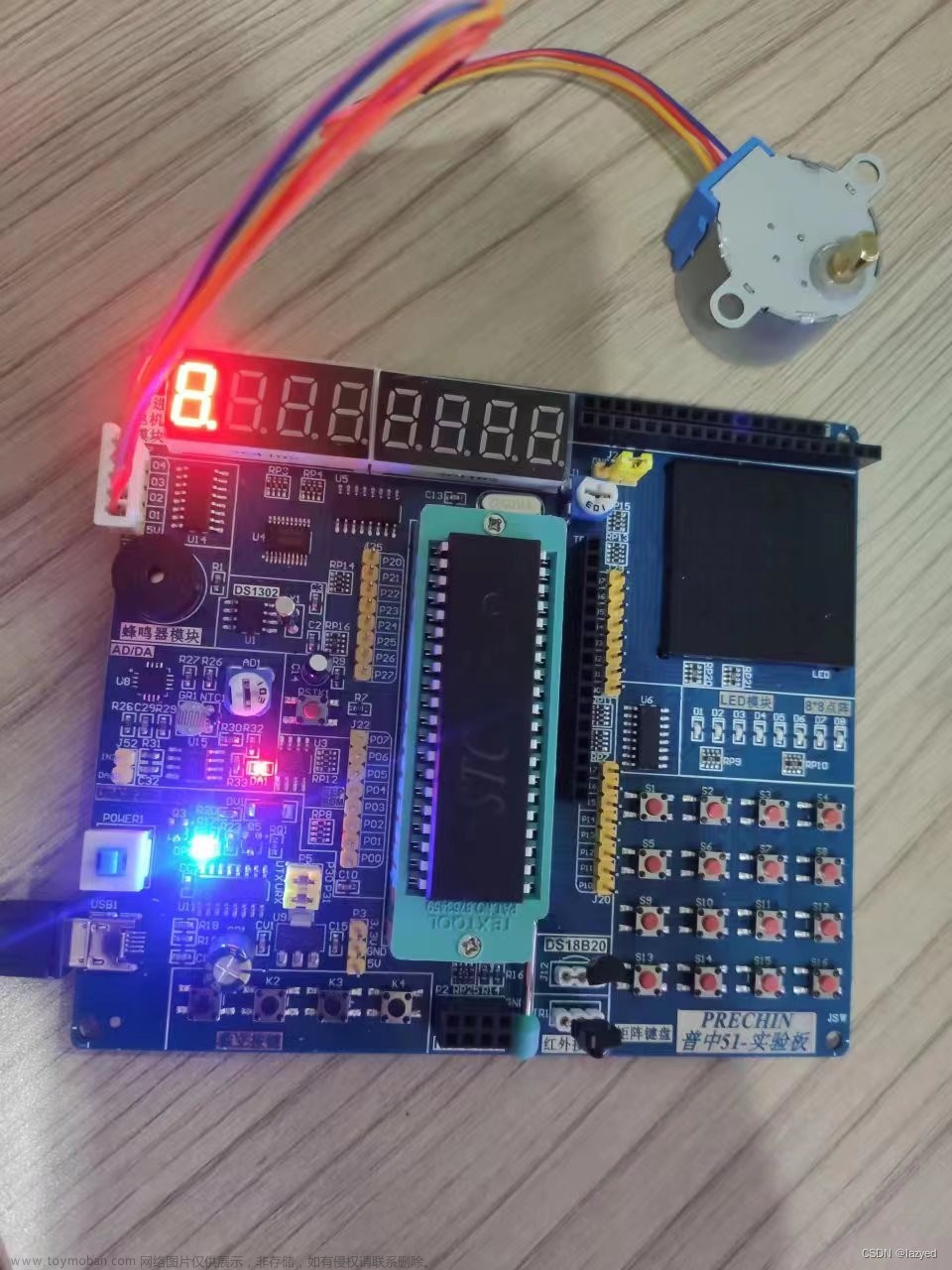
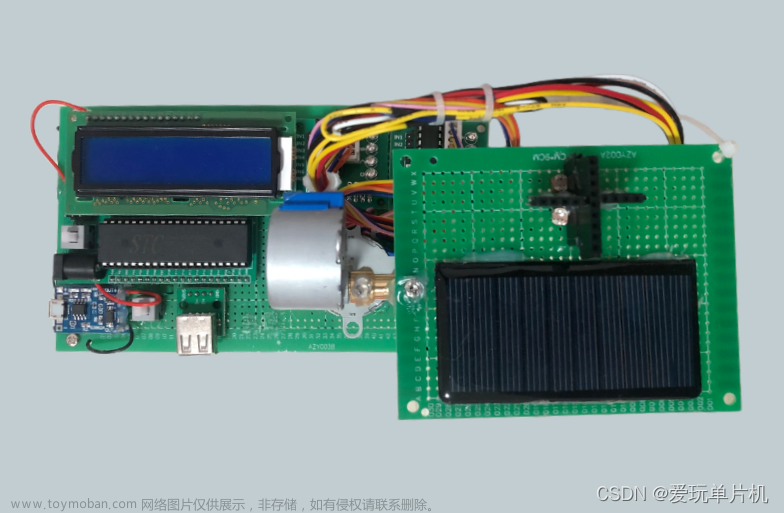
四、实验现象
B站演示视频:https://space.bilibili.com/444388619

 文章来源:https://www.toymoban.com/news/detail-521829.html
文章来源:https://www.toymoban.com/news/detail-521829.html
联系作者
B站演示视频:https://space.bilibili.com/444388619
专注于51单片机、STM32、国产32、DSP、Proteus、ardunio、ESP32、物联网软件开发,PCB设计,视频分享,技术交流。文章来源地址https://www.toymoban.com/news/detail-521829.html
到了这里,关于【Proteus仿真】【51单片机】步进电机控制系统设计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!