最近有个项目上需要用到网络功能,于是开始移植网络相关代码。在移植的过程中感觉好难,网上找各种资料都没有和自己项目符合的,移植废了废了好的大劲。不过现在回头看看,其实移植很简单,主要是当时刚开始接触网络,各种新的知识和概念扑面而来,加上LWIP这个协议的相关资料,一下接触的太多,大脑已经混乱了。所以就感觉很难,当各种逻辑梳理清楚的时候,移植起来就很简单了。
下面就将我自己的经验总结一下,由于以前没有接触过网络,所以就需要一个系统的学习和了解相关知识。我是按照正点原子的资料来学习的。

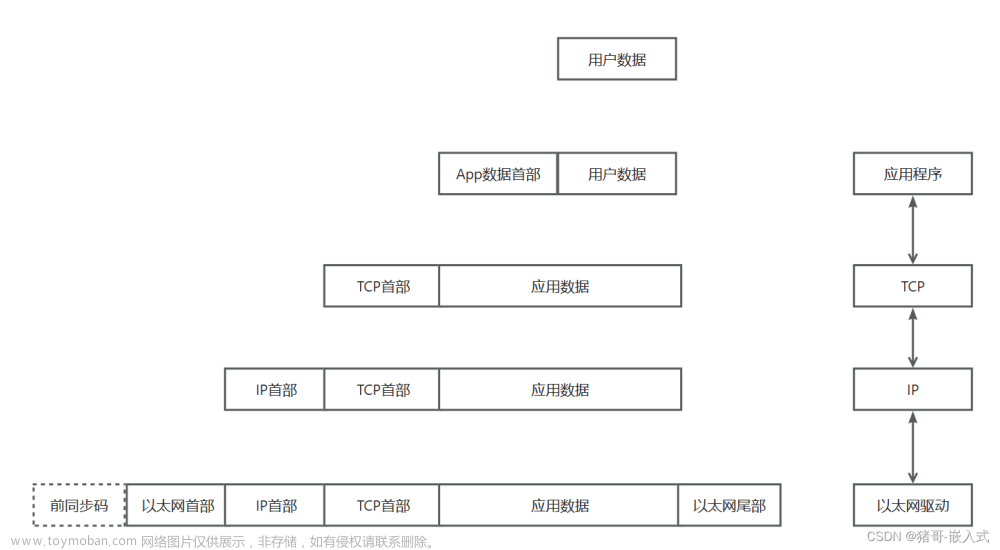
首先了解一下LWIP的相关概念,然后需要了解一下STM32以太网架构。

这个图就是告诉我们,在STM32芯片的内部已经集成了对外部PHY芯片的驱动,如果我们要使用PHY芯片的话,就按照STM32提供的接口方式去连线就行了。
一般单片机和芯片连接的话有两种接口,一种是MII接口,一种是RMII接口。这两种接口看不懂也无所谓,了解一下就行了。知道这个概念就行。
目前大多数用的都是RMII接口,因为这个接口占用的IO口少。通用的连接方式如下:

这个图理解不了没关系,直接看电路图。

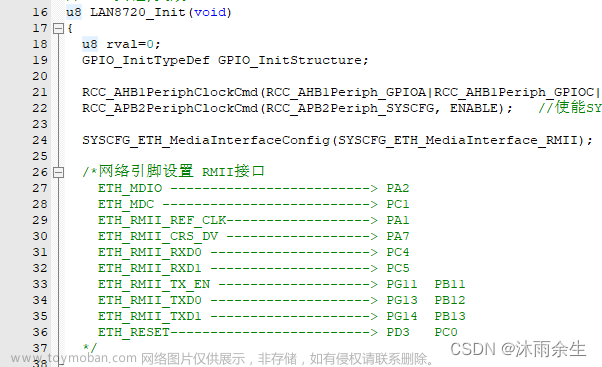
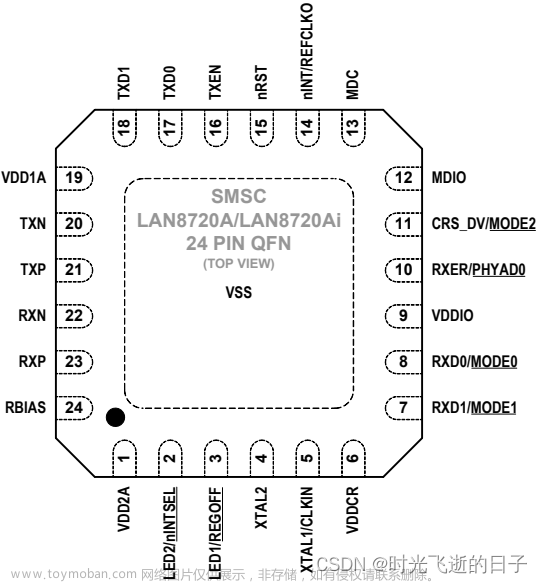
这个是正点原子开发板上使用的LAN8720芯片的连接图,这个第一次看的话感觉也看不懂。那就继续看下面这个引脚连接框图。这个图里面除了晶振和复位信号以外其他所有的信号连接都是固定的。

也就是说,不管你使用的是什么型号的PHY芯片,也不管不使用的是STM32的那一个型号单片机。这些引脚的连接都是固定搭配的。比如PHY芯片的TX_EN信号就必须要连接STM32单片机的ETH_TH_EN引脚。PHY芯片的TXD1引脚必须要连接STM32额ETH_TXD1引脚。
当明白了这个端口连接都是固定的话,在回头看上面的电路图和连接框图就能理解了。也就是说不管你用的PHY芯片和我用的或者其他例程上用的芯片是不是同一个型号,都没有关系,只要你使用的连接接口是RMII方式的,那么接线方式就都是这样的。
接下来看复位信号,PHY芯片在复位的时候必须要给复位引脚给一个高低电平,来控制芯片的复位。所以PHY的复位引脚的电平就由单片机来控制。至于选择单片机哪个口,这个没有规定。自己的哪个IO口空闲就可以用哪个IO口。单片机选择的这个复位引脚在程序中只会用到一次。
ETHERNET_RST( 0 ); /* 硬件复位 */
delay_ms( 100 );
ETHERNET_RST( 1 ); /* 复位结束 */
也就是在初始化PHY芯片的时候,控制PHY的复位引脚有个电平的变化。
可以看看我移植的代码和正点原子代码的区别。

左边是我自己使用DP83848芯片的引脚配置,右边是正点原子使用 YT8512C芯片的引脚配置,可以看出这两个芯片只有复位引脚的连接是不一样的,其他信号的连接都是一样的。
最后来看一下这个晶振引脚的连接,如果要使用RMII接口,那么PHY芯片和STM32芯片,都需要外面提供一个50MHz的时钟源。那么最简单的接线方式就是,外面分别接一个50MHz的晶振。

但是这种实际应用起来明显感觉很浪费,为啥非要都各自使用一个50MHz的晶振,难道两个芯片不能用一个晶振吗?于是就将电路修改为下面这种方式。

于是PHY芯片和STM32的时钟信号都是从外面晶振引脚直接获取的。我使用的硬件连接就是这种方式。DP83848芯片的X1引脚和STM32F407单片机的ETH_RMII_REF_CLK引脚直接接晶振的OUT引脚。
这样使用起来挺方便的也挺好的,但是有的PHY芯片厂商又出来搞事情了,说我的PHY芯片为了帮助你降低硬件成本,外部晶振只需要25MHz就行了,我内部可以把25MHz倍频到50MHz。那么接线图就可以改成下面这种。

PHY芯片可以外部接25MHz的晶振,内部倍频到50MHz,但是STM32没有这个功能压呀,STM32需要的50MHz频率又要去哪里找呢,难不成外部还要再接一个50MHz的晶振?这样肯定是不行的。这时候PHY芯片厂商又发话了,为了解决你们面临的这个困难,我的PHY芯片可以把内部倍频后的50MHz时钟频率输出,这样STM32就可以使用我输出的50MHz频率。
于是晶振连接图就变成下面这个。

上面的那张正点原子LAN8720芯片引脚连接电路图就使用的是这种连接方式。给PHY芯片外部接25MHz的晶振,然后PHY内部倍频到50MHz之后,通过CLK_OUT引脚输出,将这个输出信号在接到STM32单片机的ETH_RMII_REF_CLK引脚上,给STM32内部提供50MHz的时钟。
不同PHY的硬件部分区别基本就这些,下面就开始移植软件,软件的代码可以直接在正点原子的例程上修改。
这里我就用我移植好的例子和正点原子的例子对比来说明,要修改哪些地方。
首先打开 stm32f4xx_hal_conf.h头文件,在这里修改晶振的值,这个晶振不是PHY芯片使用的晶振,而是STM32单片机工作时使用的外部晶振。正点原子的开发板默认使用的都是8MHz的晶振,而我自己的板子使用的是10MHz的晶振,所以这里就需要根据自己的硬件修改晶振值。
如果晶振值进行了修改,那么下来还需要修改main.c文件中的时钟初始化函数。

这里需要将sys_stm32_clock_init函数的第二个参数,修改为自己的晶振值,如果你你使用的晶振是10MHz这里就改为10,如果使用的是25MHz就修改为25,这个参数的含义就是将使用的晶振分频X,使分频后的频率值为1MHz。
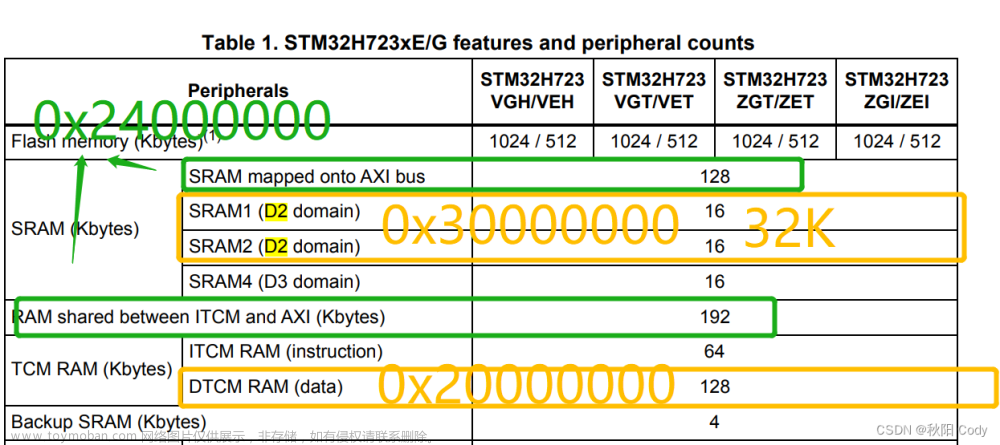
接下来在 stm32f4xx_hal_conf.h头文件中修改网络芯片地址。
这个芯片地址是由硬件来决定的,这个可以再芯片手册上查看。

接下来在宏定义里面添加自己的网卡型号。
然后添加对应型号的PHY芯片的SR寄存器相关宏定义
这里需要添加3个宏定义值
#define PHY_SR ((uint16_t)0x10) /*!< tranceiver status register */
#define PHY_SPEED_STATUS ((uint16_t)0x0002) /*!< configured information of speed: 100Mbit/s */
#define PHY_DUPLEX_STATUS ((uint16_t)0x0004)
PHY_SR 设置PHY芯片中SR寄存器的地址,这个地址值直接在芯片手册中看。
这里要顺便说一下,PHY 是由 IEEE 802.3 定义的,一般通过 SMI 对 PHY 进行管理和控制,也就是读写 PHY内部寄存器。PHY 寄存器的地址空间为 5 位,可以定义 0~31 共 32 个寄存器。IEEE 802.3定义了 0~15这 16个寄存器的功能,而 16~31寄存器由芯片制造商自由定义的。
也就是说每个PHY芯片内部的 0号寄存器到15号寄存器的内容都是一样的,只有16号寄存器到31号寄存器的内容是厂家自己设置的。
所以在程序移植时,代码中使用的0到15号寄存器都是一样的,我们不用管,自己需要设置的就是厂家自己定义的PHY状态寄存器的地址。
我使用额定DP83848芯片状态寄存器的地址是0x10,所以这里宏定义就设置为0x10.
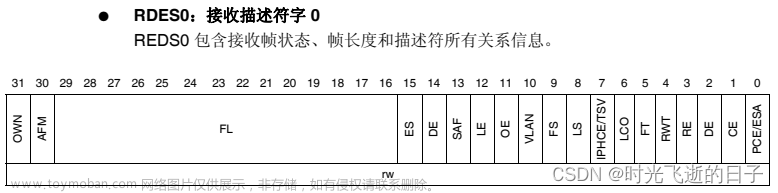
接下来要设置PHY_SPEED_STATUS 速度状态这个值,这个值的含义就是网口的速度值读取位置。这个位置指的是在PHY_SR寄存器里面的位置。


这个需要在芯片手册里面去找SR寄存器的详细介绍,通过查看SR寄存器可以看出,速度状态是通过SPEED STATUS这一位读出来的,当值为1时,表示网口速度为10M,当值为0时,代表网卡速度为100M。这一位在SR寄存器中的第1位,所以值就是 0x0002,也就是在程序中读取SR寄存器的值,然后与0x0002做与运算,就能计算出SPEED STATUS位的值是0还是1,通过这个结果就能知道当前网卡的速度是多少。
第三个需要设置的是PHY_DUPLEX_STATUS双工状态的偏移值,这个值在寄存器中第2位。


当这个为1时,为全双工状态,当这个位为0时,为半双工状态。由于这个在第2位,所以值就是0x0004,从SR寄存器中读取的值和0x0004进行相与,得出的结果就能判断出当前网卡是全双工还是办双工。
宏定义修改在这里就完了,下面开始修改代码。
打开 ethernet.c文件,修改ethernet_chip_get_speed()函数,这个函数的作用就是通过刚才设置的宏定义值读取网卡的速度信息。
/**
* @breif 获得网络芯片的速度模式
* @param 无
* @retval 1:获取100M成功
0:失败
*/
uint8_t ethernet_chip_get_speed( void )
{
uint8_t speed;
#if(PHY_TYPE == LAN8720)
speed = ~( ( ethernet_read_phy( PHY_SR ) & PHY_SPEED_STATUS ) ); /* 从LAN8720的31号寄存器中读取网络速度和双工模式 */
#elif(PHY_TYPE == SR8201F)
speed = ( ( ethernet_read_phy( PHY_SR ) & PHY_SPEED_STATUS ) >> 13 ); /* 从SR8201F的0号寄存器中读取网络速度和双工模式 */
#elif(PHY_TYPE == YT8512C)
speed = ( ( ethernet_read_phy( PHY_SR ) & PHY_SPEED_STATUS ) >> 14 ); /* 从YT8512C的17号寄存器中读取网络速度和双工模式 */
#elif(PHY_TYPE == RTL8201)
speed = ( ( ethernet_read_phy( PHY_SR ) & PHY_SPEED_STATUS ) >> 1 ); /* 从RTL8201的16号寄存器中读取网络速度和双工模式 */
#elif(PHY_TYPE == DP83848)
speed = ( ( ethernet_read_phy( PHY_SR ) & PHY_SPEED_STATUS ) >> 1 ); /* 从DP83848的16号寄存器中读取网络速度和双工模式 */
#endif
return speed;
}
在这个函数里面添加自己的PHY芯片信息,由于PHY_SPEED_STATUS这个在寄存器中第1位,所以将SR寄存器读取到的值和 PHY_SPEED_STATUS相与,然后右移一位,将结果存放在第0位。通过判断第0位的值是0还是1就可以知道网卡的速度了。PHY_DUPLEX_STATUS这个宏定义在程序中未用到。
接下来就剩最后一步了,就是复位引脚的修改。打开 ethernet.h头文件
正点原子的复位引脚用的是PD3,将这个引脚修改为自己的硬件电路实际连接引脚。我用的是PA1引脚,所以这里将复位引脚改为PA1.

到此DP83848芯片的移植就完成了,下载程序到单片机,然后在电脑上使用ping命令测试网络是否联通。
最后统一总结一下移植的步骤文章来源:https://www.toymoban.com/news/detail-522192.html
1.stm32f4xx_hal_conf.h 头文件 修改外部晶振大小 由8M修改为 10M
#define HSE_VALUE (8000000U) ---> #define HSE_VALUE (10000000U)
2.main.c 修改时钟初始化函数
sys_stm32_clock_init(336, 8, 2, 7); ---> sys_stm32_clock_init(336, 10, 2, 7);
3.stm32f4xx_hal_conf.h 头文件 修改网络芯片地址
ETHERNET_PHY_ADDRESS 值由0x00 改为0x01
4.stm32f4xx_hal_conf.h 头文件增加宏定义相关代码
#define DP83848 4
#define PHY_TYPE DP83848
#elif(PHY_TYPE == DP83848)
#define PHY_SR ((uint16_t)0x10) /*!< tranceiver status register */
#define PHY_SPEED_STATUS ((uint16_t)0x0002) /*!< configured information of speed: 100Mbit/s */
#define PHY_DUPLEX_STATUS ((uint16_t)0x0004) /*!< configured information of duplex: full-duplex */
5. ethernet.c文件中增加网络状态判断代码
#elif(PHY_TYPE == DP83848)
speed = ( ( ethernet_read_phy( PHY_SR ) & PHY_SPEED_STATUS ) >> 1 ); /* 从DP83848的16号寄存器中读取网络速度和双工模式 */
6.ethernet.h 头文件中修改PHY复位引脚 将PD3 改为 PA3
#define ETH_RESET_GPIO_PORT GPIOA
#define ETH_RESET_GPIO_PIN GPIO_PIN_3
#define ETH_RESET_GPIO_CLK_ENABLE() do{ __HAL_RCC_GPIOI_CLK_ENABLE();}while(0) /* 所在IO口时钟使能 */
/* ETH端口定义 */
#define ETHERNET_RST(x) do{ x ? \
HAL_GPIO_WritePin(ETH_RESET_GPIO_PORT, ETH_RESET_GPIO_PIN, GPIO_PIN_SET) : \
HAL_GPIO_WritePin(ETH_RESET_GPIO_PORT, ETH_RESET_GPIO_PIN, GPIO_PIN_RESET); \
}while(0)
DP83848移植工程完整下载连接: DP83848网络驱动芯片在STM32F407单片机上的移植文章来源地址https://www.toymoban.com/news/detail-522192.html
到了这里,关于STM32F407+LWIP+DP83848以太网驱动移植的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!