前言
简单的说,ADRC可以理解为PID增强版,主要由ESO(扩展状态观测器)、非线性(或线性)控制器、TD(跟踪微分器)组成,其灵魂也是最核心的地方是ESO。
TD(跟踪微分器)
跟踪微分器是对输入进行连续化的过程,具体公式如下:
其中,“r”为跟踪速度因子,“h”为震荡因子。我们给一个阶跃输入看看实际效果:
可以看到,经过跟踪器之后的信号变得连续,但是有利就有弊,信号会有一定的滞后。
非线性(或线性)控制器
这部分也可以叫做误差反馈控制器,有很多种的形式,比较常用的有:
这个fal函数同样也有很多种,可以挨个试试看看哪个效果好。
ESO(扩展状态观测器)
扩张状态观测器是ADRC的控制理念体现,是ADRC中最重要的一环。它将系统总扰动扩张成一个新的系统状态量,通过系统的控制输入、输出将扩张的状态变量观测出来并加以补偿。其算法如下:
 文章来源:https://www.toymoban.com/news/detail-524039.html
文章来源:https://www.toymoban.com/news/detail-524039.html
实验效果
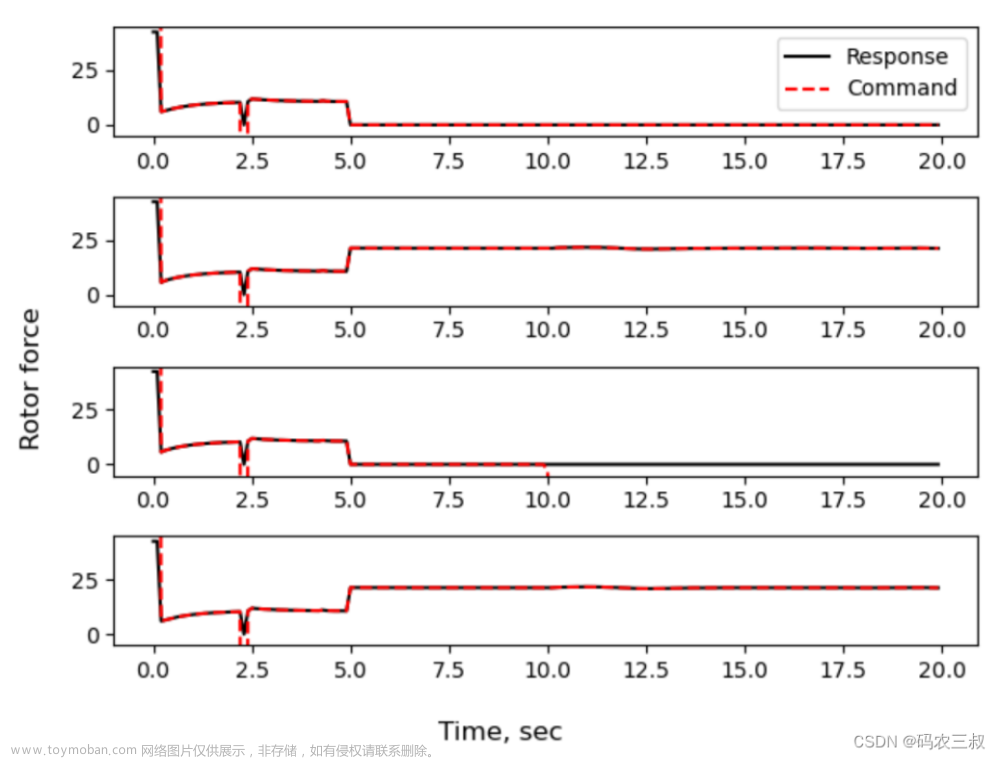
给一个正弦波函数做个跟踪看看效果:
这是经过TD滞后的e1和e2。
这是跟踪误差,目测超调有7%左右,优化空间很大。文章来源地址https://www.toymoban.com/news/detail-524039.html
到了这里,关于(一)ADRC自抗扰控制-各部分简介与仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!