-
概要说明 / General Information
- 文档目的 / Document Purpose
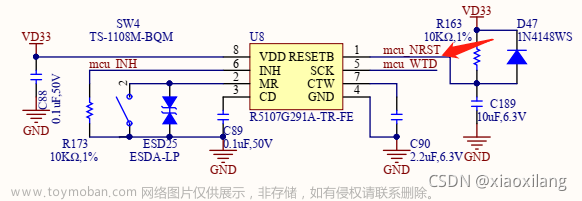
本文档定义BMS平台的硬件架构设计,包含SBC电源模块,模拟信号采集模块,数字信号采集模块,高压互锁模块,MCU最小系统,CAN收发器模块,HSD,LSD,高压及绝缘采集模块,高压侧MCU系统,前端采样芯片及通信转换模块等;
-
- 输入文档 / Input Document
| 序号 No. |
文档名称 Document Name |
文档版本 Version |
文档日期 Date |
| 01 |
HW Safety Requirement Template |
V00 |
2018/12/1 |
-
- 参考文档 / Reference Document
| 序号 No. |
文档名称 Document Name |
文档版本 Version |
文档日期 Date |
| 01 |
HW-SW Interface Specification |
V00 |
2018/12/1 |
-
- 术语和缩略语 / Terms and Abbreviation
| 术语/缩略语 Terms and Abbreviation |
描述 Description |
| ASIL |
Automotive Safety Integrity Level |
| CCF |
Common Cause Failure |
| DC |
Diagnostic Coverage |
| FTTI |
Fault Tolerant Time Interval |
| OT |
Over temperature |
| OV |
Over Voltage |
| HSI |
Hardware – Software Interface |
-
设计方针 / Design Strategy
根据系统需求针对每个子单元进行独立性设计,参考QCT897等约束条件进行自顶向下设计;
系统子单元设计时遵循ISO26262-5标准;
器件选型时遵循QR-03-60系统设计规格书,根据系统组件定义分配硬件安全模块及定义ASIL等级;
-
- 硬件设计标准 / Hardware Design Rules
硬件设计需遵循系统需求,硬件需求表(需求表包含信号资源,信号电气特性等),遵循自顶向下,电路模块化分析的原则;
-
- 硬件功能安全的设计方针 / Hardware Functional Safety Design Rules
遵循ISO26262-5标准及QCT897标准等;
| HW Design Properties (Acc. To ISO26262 – 5) |
AA |
BB |
CC |
DD |
QQM |
|
| 1 |
Hierarchical design层次化设计 |
+ |
+ |
+ |
+ |
|
| 2 |
Precisely defined interfaces of safety-related hardware components准确定义功能安全相关组件的接口 |
++ |
++ |
++ |
++ |
|
| 3 |
Avoidance of unnecessary complexity of interfaces 避免不必要接口的复杂性 |
+ |
+ |
+ |
+ |
|
| 4 |
Avoidance of unnecessary complexity of hardware components避免不必要的硬件组件复杂性 |
+ |
+ |
+ |
+ |
|
| 5 |
Maintainability (service)可维护性 |
+ |
+ |
++ |
++ |
|
| 6 |
Testability可探测性 |
+ |
+ |
++ |
++ |
-
- 其它的设计方针 / Other Design Rules
遵循QCT-897标准,遵循ISO-11898,ISO-10605,ISO7637等标准;
- 约束条件 / Constraint Conditions
本项目使用Infineon Aurix 三核ASIL-D认证的功能安全芯片TC275,在此芯片上实现符合功能安全的软件架构,具有3.3V/5V 电压等级,主频为200MHz,3路Watchdog,1 Safety Watchdog,Flash: 4 MB,RAM: 472 KB,DFlash: 384 KB,ADC: 12bit,CAN * 4,支持CAN FD,LIN * 4,SPI * 4,以太网接口,HSM硬件加密;
整个电池管理系统采用一体机的模式,使用7片MC33771C级联作为采样前端,每片MC33771管理14串电芯电压,采样芯片之间使用菊花链方式通信,共支持96串电芯。文章来源:https://www.toymoban.com/news/detail-526599.html
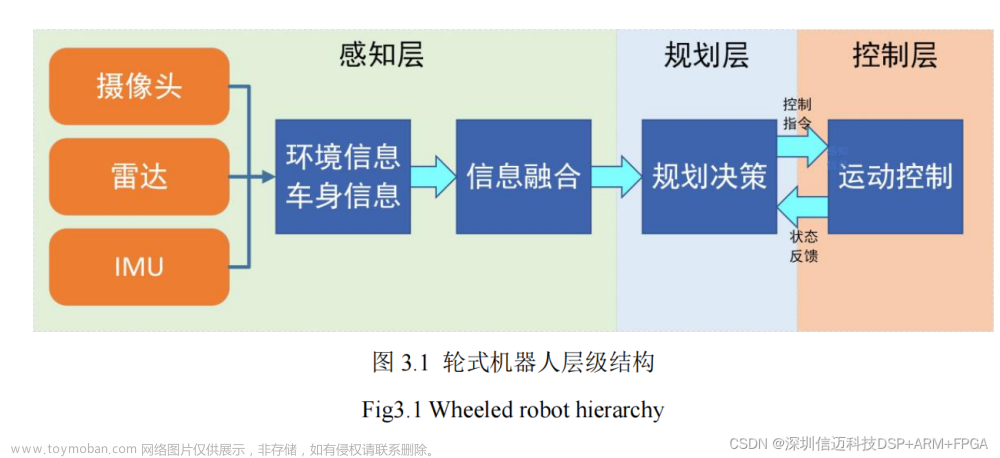
采集各个串联电池单体或模块的实时电压、温度、系统总电压、系统充放电总电流等数据,通过特定算法,实现对电池系统荷电状态SOC 、生命健康状态SOH 估算;对采集到的数据进行分析,诊断系统当前故障状态,历史数据记录、故障数据记录等,有效实现电池平衡控制,温度场控制(散热)、绝缘监测等。通过高速CAN 总线实时向整车控制器、车载仪表、远程监控设备等上报当前系统数据及诊断状态并接受来自整车控制器、驾驶室、远程监控设备等发来的控制命令,结合BMS自身状态,有效实施系统的高压控制。文章来源地址https://www.toymoban.com/news/detail-526599.html
到了这里,关于【AUTOSAR】BMS开发实际项目讲解(七)----BMS硬件架构设计概要说明的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!