提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
提示:这里可以添加本文要记录的大概内容:
例如:随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。
提示:以下是本篇文章正文内容,下面案例可供参考
一、项目介绍
本项目包含KEIL代码编写和Proteus代码仿真两部分,主要通过基础定时器实现时钟功能,难点在于在六位数码管上显示,本项目采用定时器3的中断,以一秒为一单位,重点对时间的处理,让小时,分钟,秒显示在数码管上,项目扩展部分,可以加入按键来进行一个时间的设置与校准。
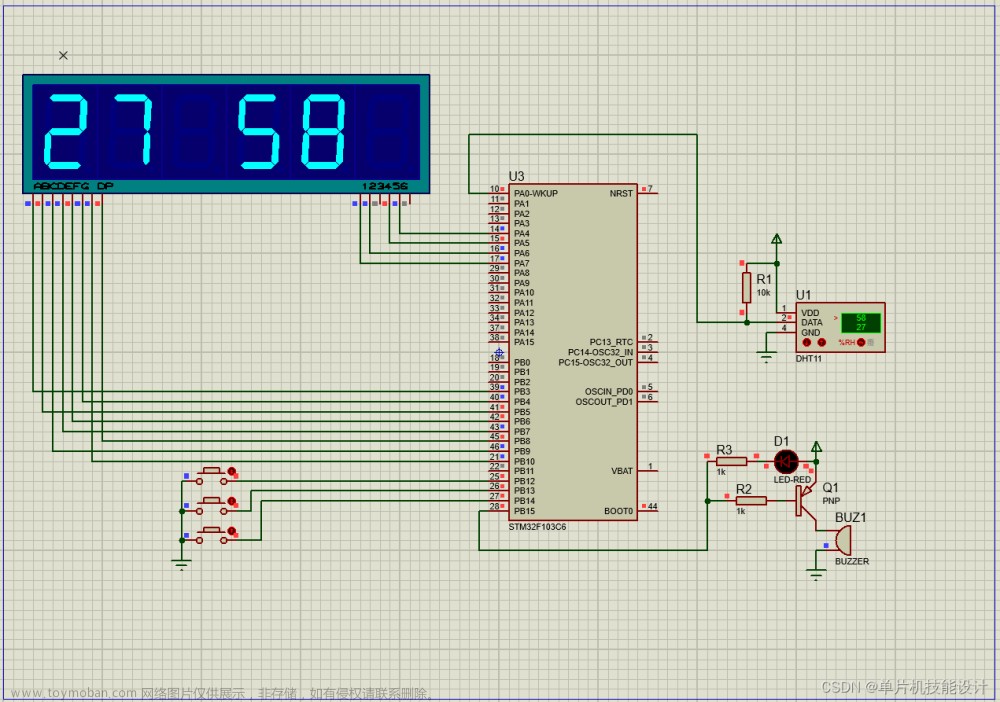
Proteus仿真方面,配置好I/O后,在驱动数码管时,需要添加74LS245模块来增强I/O的驱动能力,数码管采用的是共阳极连接,对于段选和位选这里就不多赘述,值得注意的是,段选和位选的I/O分配最好不要都在一个I/O上,这样避免GPIO写入时发生冲突。
二、代码展示
1.SMG.C
代码如下(示例):
#include "stm32f10x.h"
#include "smg.h"
void SMG_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//使能GPIOC时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC, ENABLE);
GPIO_InitStructure.GPIO_Pin = 0x00ff; //PC0-PC7引脚配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //配置为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIOC速度为50MHz
GPIO_Init(GPIOC, &GPIO_InitStructure); //初始化PC0-PC7
GPIO_InitStructure.GPIO_Pin = 0x003f; //PB0-PC5引脚配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //配置为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIOB速度为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化PB0-PB5
}
2.SWG.H
代码如下(示例):
#ifndef __SMG_H
#define __SMG_H
void SMG_Init(void);
#endif
3.timer.c
#include "timer.h"
#include "stm32f10x_tim.h"
int count=0;
// 通用定时器3中断初始化
// 这里时钟选择为APB1的2倍,而APB1为36M
// arr:自动重装值。
// psc:时钟预分频数
// 这里使用的是定时器3!
void TIM3_Int_Init(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); // 时钟使能
// 定时器TIM3初始化
TIM_TimeBaseStructure.TIM_Period = arr; // 设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler = psc; // 设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); // 根据指定的参数初始化TIMx的时间基数单位
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); // 使能指定的TIM3中断,允许更新中断
// 中断优先级NVIC设置
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);//设定中断优先级分组0
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; // TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; // 从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); // 初始化NVIC寄存器
TIM_Cmd(TIM3, ENABLE); // 使能TIMx
}
// 定时器3中断服务程序
void TIM3_IRQHandler (void) // TIM3中断
{
if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) // 检查TIM3更新中断发生与否
{
count++;
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); // 清除TIMx更新中断标志
}
}
4.timer.h
#ifndef __TIMER_H
#define __TIMER_H
#include "sys.h"
extern int count;
void TIM3_Int_Init(u16 arr,u16 psc);
#endif
5.main.c
#include "stm32f10x.h"
#include "Delay.h"
#include "smg.h"
#include "timer.h"
//定义0~9十个数字的字型码表
uint16_t table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
uint16_t wei[]={0x0fe,0x0fd,0x0fb,0x0f7,0x0ef,0x0df,0xff,0xff}; //位码;
int main(void)
{
SMG_Init();
TIM3_Int_Init(719,9999);
while(1)
{
if(count<60)
{
GPIO_Write(GPIOB,wei[0]);
GPIO_Write(GPIOC,table[count%10]);
Delay(10);
GPIO_Write(GPIOB,wei[1]);
GPIO_Write(GPIOC,table[count/10%10]);
Delay(10);
for(uint8_t i=2;i<=5;i++)
{
GPIO_Write(GPIOB,wei[i]);
GPIO_Write(GPIOC,table[0]);
Delay(10);
}
}
if(count>=60||count<3600)
{
int m,n,t=0;
n=count/60%10;
m=count/60/10;
t=count%60;
GPIO_Write(GPIOB,wei[0]);
GPIO_Write(GPIOC,table[t%10]);
Delay(10);
GPIO_Write(GPIOB,wei[1]);
GPIO_Write(GPIOC,table[t/10%10]);
Delay(10);
GPIO_Write(GPIOB,wei[2]);
GPIO_Write(GPIOC,table[n]);
Delay(10);
GPIO_Write(GPIOB,wei[3]);
GPIO_Write(GPIOC,table[m]);
Delay(10);
GPIO_Write(GPIOB,wei[4]);
GPIO_Write(GPIOC,table[0]);
Delay(10);
GPIO_Write(GPIOB,wei[5]);
GPIO_Write(GPIOC,table[0]);
Delay(10);
}
if(count>=3600||count<86400)
{
int m,n,t,x,y,q=0;
x=count/3600/10;
y=count/3600%10;
q=count%3600;
m=q/60/10;
n=q/60%10;
t=q%60;
GPIO_Write(GPIOB,wei[0]);
GPIO_Write(GPIOC,table[t%10]);
Delay(10);
GPIO_Write(GPIOB,wei[1]);
GPIO_Write(GPIOC,table[t/10%10]);
Delay(10);
GPIO_Write(GPIOB,wei[2]);
GPIO_Write(GPIOC,table[n]);
Delay(10);
GPIO_Write(GPIOB,wei[3]);
GPIO_Write(GPIOC,table[m]);
Delay(10);
GPIO_Write(GPIOB,wei[4]);
GPIO_Write(GPIOC,table[y]);
Delay(10);
GPIO_Write(GPIOB,wei[5]);
GPIO_Write(GPIOC,table[x]);
Delay(10);
}
}
}
三、Proteus仿真

四、总结
在项目开发时候,需要理解数码管的工作原理,理解段选和位选的区别,对于数码管动态显示来说,认识到同一时间数码管只能显示一位,重点在于定时器中断后时间的处理,需要对数据进行分解。Proteus仿真方面,芯片调频72MHz。文章来源:https://www.toymoban.com/news/detail-527880.html
五、文件
代码和模型文件:
链接:https://pan.quark.cn/s/25e64b55ec13
提取码:CG29文章来源地址https://www.toymoban.com/news/detail-527880.html
到了这里,关于基于STM32的时钟设计并在六位数码管上显示附proteus仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!