前情提要
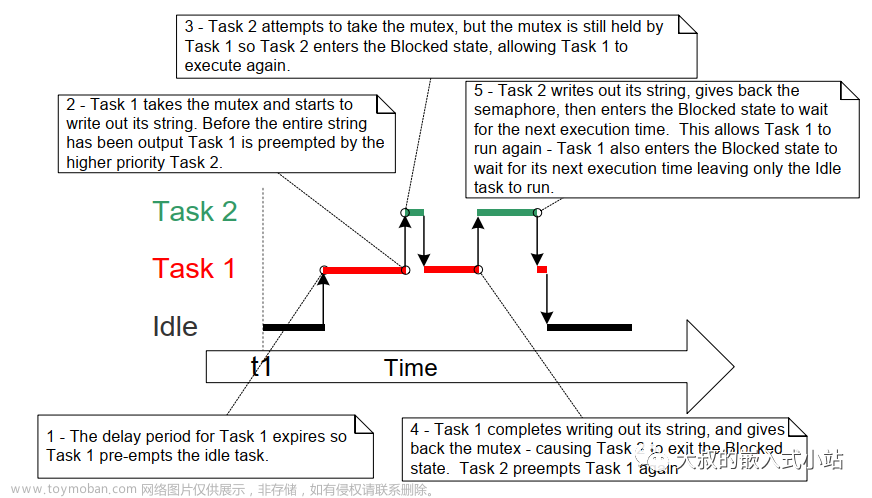
FreeRTOS ~(四)同步互斥与通信 ~ (2/3)互斥的缺陷举例子说明:利用队列解决前述的"互斥的缺陷"问题
static QueueHandle_t xQueueUARTHandle;
/* 利用队列的写数据和读数据来做类似标志位的工作,类似于锁,因此实际上并不关心这个数据表示的具体值是多少.
而只在意数据是否写入队列,数据是否被读取走.
队列在这里就相当于做了全局变量Flag的作用. */
int InitUARTLock(void)
{
int val;
/* 创建一个队列,只有1个Item,Item的大小是sizeof(int),因为val是int类型 */
xQueueUARTHandle = xQueueCreate(1, sizeof(int));
/* 创建队列有可能会失败,因此给一个返回值表示创建是否成功 */
if (xQueueUARTHandle == NULL)
{
printf("can not create queue\r\n");
return -1;
}
/* 创建完成就执行写队列操作,以此来激活队列使用,因为如果队列内没有数据,那么读取的Task就被阻塞了
可以看到,使用的时候,其实并不在意val的值是多少,而是利用FreeRTOS提供的队列机制,完成信号标志的切换 */
xQueueSend(xQueueUARTHandle, &val, portMAX_DELAY);
return 0;
}
void GetUARTLock(void)
{
int val;
/* 在这个例子中,如果能够从队列中得到数据,那么就表明得到了串口的使用权 */
xQueueReceive(xQueueUARTHandle, &val, portMAX_DELAY);
}
void PutUARTLock(void)
{
int val;
/* 在这个例子中,使用完串口之后,要将串口释放掉,就通过写队列即可 */
xQueueSend(xQueueUARTHandle, &val, portMAX_DELAY);
}
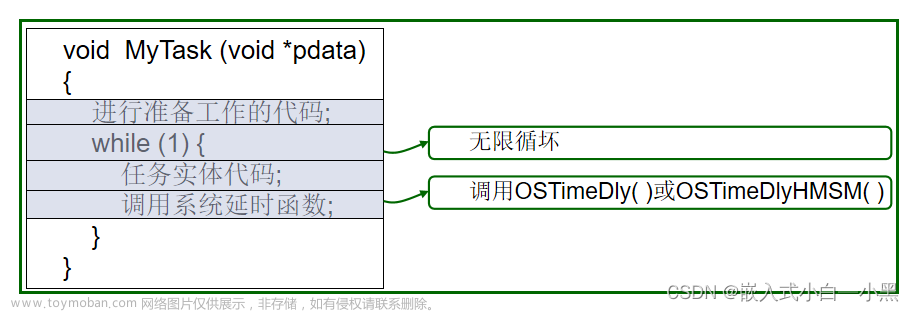
void TaskGenericFunction(void * param)
{
while (1)
{
GetUARTLock();
printf("%s\r\n", (char *)param);
/* 如果这个通用函数内,没有最后那一行延时1个Tick的函数 vTaskDelay(1); 结果是怎么的?
对于main创建的任务而言,Task3与Task4的优先级一致均大于0,且Task4后创建,
那么任务调度器开启之后,先执行的任务是Task4,
在这里下一行代码就是释放串口使用权了,因此在本行,Task4在运行,Task3在等待获取串口权
当代码运行到下一行的时候,因为执行了写队列的操作,队列中有数据了,
因此Task3就立即变为了ready状态,但是Task4是running状态,因此仍然是Task4获取串口使用权,
那么最终的效果就是只有Task4独享了串口使用权,打印的效果就是:
Task 4 is running
Task 4 is running
Task 4 is running
Task 4 is running ...
因此必须加上延时,以确保当前执行的Task使用完串口打印功能后,主动放弃 */
PutUARTLock();
vTaskDelay(1);
}
}
int main( void )
{
prvSetupHardware();
/* */
InitUARTLock();
xTaskCreate(TaskGenericFunction, "Task3", 100, "Task 3 is running", 1, NULL);
xTaskCreate(TaskGenericFunction, "Task4", 100, "Task 4 is running", 1, NULL);
/* Start the scheduler. */
vTaskStartScheduler();
return 0;
}
执行结果下:
 文章来源:https://www.toymoban.com/news/detail-528260.html
文章来源:https://www.toymoban.com/news/detail-528260.html
这里用到了三个函数:
1.创建队列
2.写队列
3.读队列
详细的说明见下述链接文章末尾:
FreeRTOS ~(五)队列的常规使用 ~ (1/5)解决同步缺陷文章来源地址https://www.toymoban.com/news/detail-528260.html
到了这里,关于FreeRTOS ~(五)队列的常规使用 ~ (2/5)队列解决互斥缺陷的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!