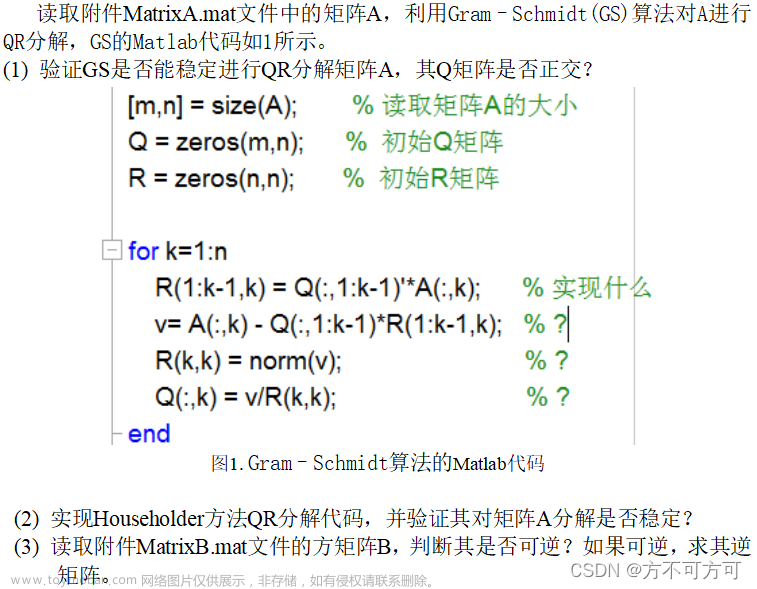
QR分解是一种将矩阵分解为正交矩阵和上三角矩阵的方法。在QR分解中,正交矩阵Q的转置是它的逆矩阵,因此QR分解可以用于求解线性方程组、最小二乘问题等。
二阶Givens矩阵
一般地,二阶Givens矩阵记为下列形式:
 其中
其中
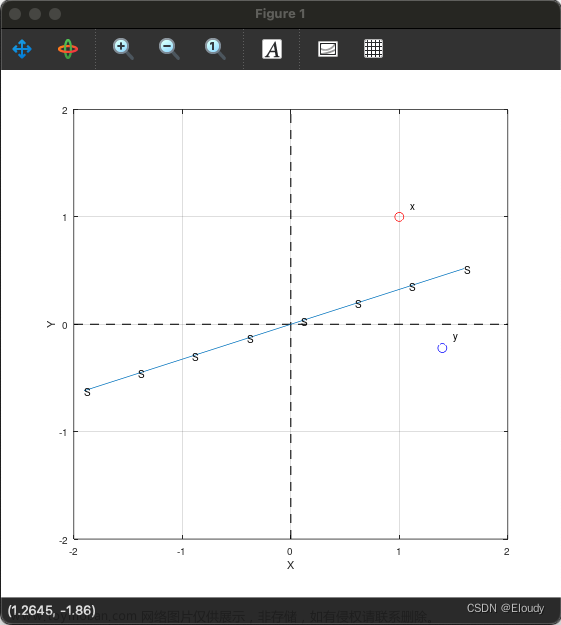
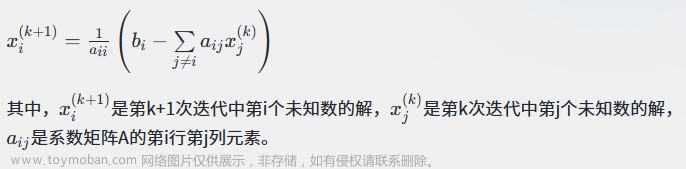
下面开始介绍基于Givens矩阵的QR分解算法。Givens矩阵是一种旋转矩阵,可以将一个向量旋转到另一个向量的方向。在QR分解中,我们使用Givens矩阵将矩阵的列向量逐个旋转,使得矩阵变为上三角矩阵。
QR分解的详细步骤如下:
对矩阵A的第一列进行Givens变换,使得A的第一列的下面的元素都变为0。这样得到一个新的矩阵A1和一个Givens矩阵G1。
对矩阵A1的第二列进行Givens变换,使得A1的第二列的下面的元素都变为0。这样得到一个新的矩阵A2和一个Givens矩阵G2。
重复步骤2,直到所有的列都被处理完毕。这样得到一个上三角矩阵R和一个正交矩阵Q,满足A=QR。
大致如下:文章来源:https://www.toymoban.com/news/detail-531329.html

下面是基于Givens矩阵的QR分解的C和Python代码:文章来源地址https://www.toymoban.com/news/detail-531329.html
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#define N 3 // 指定矩阵阶数
void print_matrix(double **M) {
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
printf("%f ", M[i][j]);
}
printf("\n");
}
}
// 矩阵乘法
double **matrix_multiply(double **A, double **B) {
int i, j, k;
double **C = (double **)malloc(sizeof(double *) * N);
for (i = 0; i < N; i++) {
C[i] = (double *)malloc(sizeof(double) * N);
}
for (i = 0; i < N; i++) {
for (j = 0; j < N; j++) {
C[i][j] = 0;
for (k = 0; k < N; k++) {
C[i][j] += A[i][k] * B[k][j];
}
}
}
return C;
}
// 单位矩阵
double **identity_matrix() {
int i, j;
double **I = (double **)malloc(sizeof(double *) * N);
for (i = 0; i < N; i++) {
I[i] = (double *)malloc(sizeof(double) * N);
for (j = 0; j < N; j++) {
if (i == j) {
I[i][j] = 1;
} else {
I[i][j] = 0;
}
}
}
return I;
}
// 矩阵的转置
double **transpose_matrix(double **A) {
int i, j;
double **AT = (double **)malloc(sizeof(double *) * N);
for (i = 0; i < N; i++) {
AT[i] = (double *)malloc(sizeof(double) * N);
for (j = 0; j < N; j++) {
AT[i][j] = A[j][i];
}
}
return AT;
}
// Givens变换c和s
double *givens_rotation(double a, double b) {
double c, s;
double *cs = (double *)malloc(sizeof(double) * 2);
if (b == 0) {
c = 1;
s = 0;
} else if (fabs(b) > fabs(a)) {
double r = a / b;
s = 1 / sqrt(1 + r * r);
c = s * r;
} else {
double r = b / a;
c = 1 / sqrt(1 + r * r);
s = c * r;
}
cs[0] = c;
cs[1] = s;
return cs;
}
double **qr_givens(double A[][N], double **Q) {
double **Q_ = identity_matrix();
Q = Q_;
double **R = (double **)malloc(sizeof(double *) * N);
for (int i = 0; i < N; i++) {
R[i] = (double *)malloc(sizeof(double) * N);
}
for (int i = 0; i < N; i++) {
for (int j = 0; j < N; j++) {
R[i][j] = A[i][j];
}
}
for (int j = 0; j < N; j++) {
for (int i = N - 1; i > j; i--) {
double **G = identity_matrix();
double *cs = givens_rotation(R[i - 1][j], R[i][j]);
double c = cs[0];
double s = cs[1];
G[i - 1][i - 1] = c;
G[i - 1][i] = s;
G[i][i - 1] = -s;
G[i][i] = c;
double **R_ = matrix_multiply(G, R);
R = R_;
double **GT = transpose_matrix(G);
double **Q_ = matrix_multiply(Q, GT);
Q = Q_;
}
}
return R;
}
int main() {
double A[N][N] = {{1, 0, 0}, {0, 1, 0}, {0, 0, 1}};
double **Q = (double **)malloc(sizeof(double *) * N);
for (int i = 0; i < N; i++) {
Q[i] = (double *)malloc(sizeof(double) * N);
}
double **R = qr_givens(A, Q);
print_matrix(R);
return 0;
}
import numpy as np
def givens_rotation(a, b): # 定义一个Givens旋转函数,a和b是两个数
if b == 0: # 如果b为0
return 1, 0 # 返回1和0
elif abs(b) > abs(a): # 如果b的绝对值大于a的绝对值
r = a / b # r等于a除以b
s = 1 / np.sqrt(1 + r ** 2) # s等于1除以根号下1加r的平方
c = s * r # c等于s乘以r
else: # 否则
r = b / a # r等于b除以a
c = 1 / np.sqrt(1 + r ** 2) # c等于1除以根号下1加r的平方
s = c * r # s等于c乘以r
return c, s # 返回c和s
def qr_givens(A): # 定义一个QR分解函数,A是一个矩阵
m, n = A.shape # m和n分别等于A的行数和列数
Q = np.identity(m) # Q等于m阶单位矩阵
R = A.copy() # R等于A的副本
for j in range(n): # 对于j在0到n-1的范围内(从第一列到第n列)
for i in range(m - 1, j, -1): # 对于m-1到j+1的范围内(从最后一行到第j行)
G = np.identity(m) # G等于m阶单位矩阵
c, s = givens_rotation(R[i - 1, j], R[i, j]) # c和s等于Givens旋转函数的返回值
G[i - 1:i + 1, i - 1:i + 1] = [[c, s], [-s, c]] # G的第i-1到i行,第i-1到i列等于[[c, s], [-s, c]]
R = np.dot(G, R) # R等于G和R的矩阵乘积
Q = np.dot(Q, G.T) # Q等于Q和G的转置矩阵的矩阵乘积
return Q, R # 返回Q和R
A = np.array([[1, 0, 0], [0, 1, 0], [0, 0, 1]]) # A等于一个3行3列的矩阵
Q, R = qr_givens(A) # Q和R等于QR分解函数的返回值
print("Q:\n", Q) # 输出Q
到了这里,关于基于Givens矩阵的QR矩阵分解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!