一、定义
Android 传感器相关术语微机电传感器(MEMS)MEMS 通常制作在规格很小的硅芯片上,借用了计算机芯片的制作技术。通常来说,所有的 Android 传感器都使用了这些技术,但是从技术的角度来说,MEMS 指的是在该传感器的部分设计中纳入了物理移动或震动,例如压力传感器、加速度计、陀螺仪等,也有可能是指南针,这些才是真正意义上的 MEMS。
二、分类及名词解释
Android 中引用的传感器大致分为两种,原始传感器(物理传感器)和合成传感器(虚拟传感器)。
原始传感器给出从传感器获得的原始数据,并且一个原始传感器对应一个 Android 设备中实际存在的的物理传感器组件。
合成传感器通过结合多个原始传感器的原始数据,或者修改原始传感器的数据,在应用代码和和底层设备之间提供一个抽象层,并为上层业务提供服务。
二元传感器(Binary Sensor)二元传感器,是一种只输出两个值其中之一的传感器。大多数的距离传感器和光传感器都属于二元传感器,因为他们只输出远和近的测量。
连续传感器(Continuous Sensor)连续传感器,测量从最小值到最大值之间的所有的数据。动态范围(Dynamic Range)动态范围指的是传感器能测量的值的范围。例如光传感器的动态范围可以是1~~10000 lux。
饱和状态(Saturation)饱和状态,在传感器视图感测一个超出它的最大测量值时产生。
分辨率(Resolution)在很多情况下,分辨率表示实际能够检测到的最小物理差值。该差值受到噪音的限制。分辨率有时用来描述在考虑系统噪音的情况下,两个信号之间能够检测出的最小差值。在 Android 系统中,分辨率是一个独立于传感器噪音之外的数字分辨率。Android 传感器输出数字信号,例如常见的有8位(256个可能的值)、10位(1024个可能的值)和12位(4096个可能的值)加速度计。最大范围除以可能的值的个数即为输出的分辨率(通过 Sensor.getResolution() 获取的值)。
采样频率(Sampling Frequency)采样频率是两次测量间的时间间隔,以赫兹(Hertz)为单位。在注册监听器的时候,可以指定监听器的延迟和测量速率。可以设置的速率值如下(SensorManager 中):
SENSOR_DELAY_FASTEST
SENSOR_DELAY_GAMESENSOR_DELAY_UI
SENSOR_DELAY_NORMAL(默认值)
三、常用API
Android SDK 提供的与传感器相关的类位于 android.hardware 包下,以下为常用的对象及其属性、方法的说明:
- Sensor: 表示传感器的类,它保存有传感器信息:最大范围(Maximum range)、最小范围(Minimum range)、名称(Name)、功率(Power)、分辨率(Resolution)、类型(* TYPE)、供应商(Vendor)、版本(Version);
int getFifoMaxEventCount():获取该传感器能分批处理的事件的最大数量。
如果这个值是零,表明批处理模式不支持此传感器。如果其他应用程序登记到成批的传感器,可以进行批处理事件的实际数目可能是较小的,因为硬件FIFO将被部分用于批处理的另一传感器。
int getFifoReservedEventCount():保留此传感器中的分批方式的FIFO的事件数。给出了对可批处理事件的最小数量的保证。
int getMaxDelay():传感器最大延迟(微秒)。
此值仅用于连续和按变化的传感器所定义。它是对应于该传感器支持的最低频率两个传感事件之间的延迟。当较低的频率通过registerListener请求()事件将在该频率产生代替。它可以用于估计当批量FIFO可以充分。旧设备可以将该值设置为零。忽略此值的情况下为负数或零。
int getMinDelay():传感器最小延迟(微秒)。
int getType():获取该传感器的类型。
int getVersion():传感器模块的版本。
int getReportingMode():报告模式为输入传感器,REPORTING_MODE_* 常量:
REPORTING_MODE_CONTINUOUS
REPORTING_MODE_ON_CHANGE
REPORTING_MODE_ONE_SHOT
REPORTING_MODE_SPECIAL_TRIGGER
float getMaximumRange():获取传感器最大值。
float getPower():获取传感器耗电量。
float getResolution():获取在传感器单元中的传感器的分辨率。
String getStringType():该传感器作为字符串的类型。
String getVendor():获取传感器的供应商。
String getName():获取传感器名称。
boolean isWakeUpSensor():当传感器是唤醒状态,返回true。
- SensorEvent:表示传感器事件,它可以保存传感器的值,传感器类型、时间戳等信息;
- SensorEventListener:提供回调以通知应用传感器相关事件的接口。为了能够接收这些事件,应用需要创建一个类实现 SensorEventListener 接口,并将其注册到 SensorManager;
onSensorChanged(SensorEvent):当传感器值发生改变时调用。
SensorEvent:
values数组:即传感器值,该值根据传感器类型不同返回不同的数值;
sensor:产生事件的传感器;
accuracy:这个事件的准确性;
timestamp:时间发生周期的纳秒值(时间戳)。
onAccuracyChanged(Sensor, int):当传感器的精度发生变化时调用。用以下四个状态常量之一来代表:
SENSOR_STATUS_ACCURACY_LOW:传感器报告低精度值;
SENSOR_STATUS_ACCURACY_MEDIUM:传感器报告平均精度值;
SENSOR_STATUS_ACCURACY_HIGH:传感器报告高精度值;
SENSOR_STATUS_UNRELIABLE:传感器报告的精度值不可靠。- SensorManager:SensorManager 让你可以访问设备(手机)的全部传感器。和其他的系统服务一样,它允许应用注册或注销传感器相关事件。一旦注册成功,应用将接收到从传感器传来的数据。除了允许应用注册以获取传感器数据以外,SensorManager 还提供处理传感器数据的方法;
List<Sensor> getSensorList(Sensor.type) 获取传感器(多个)。
Sensor getDefaultSensor(Sensor.type):获取默认传感器。
float getAltitude(float p0, float p1):计算海拔米的海平面大气压力和压力。
float getInclination(float[] I):计算从返回getRotationMatrix(float[], float[], float[], float[])倾斜弧度矩阵地磁倾角。
float[] getOrientation(float[] R, float[] values):计算基于旋转矩阵设备的方向。
void getQuaternionFromVector(float[] Q, float[] rv):辅助功能旋转向量转换为四元数归。给定一个旋转矢量(大概从ROTATION_VECTOR传感器)时,返回一个归四元阵列Q的四元数的形式存储在[W,X,Y,Z]。
void getRotationMatrixFromVector(float[] R, float[] rotationVector):辅助函数,来旋转矢量转换为旋转矩阵。
void getAngleChange(float[] angleChange, float[] R, float[] prevR):计算两个旋转矩阵之间的角度变化。
boolean cancelTriggerSensor(TriggerEventListener listener, Sensor sensor):取消接收的触发事件为触发传感器。
boolean flush(SensorEventListener listener):刷新所有传感器的FIFO注册侦听器。
boolean getRotationMatrix(float[] R, float[] I, float[] gravity, float[] geomagnetic):可以计算出旋转矩阵。
boolean remapCoordinateSystem(float[] inR, int X, int Y, float[] outR):旋转供给旋转矩阵,以便它表示不同的坐标系中。
boolean requestTriggerSensor(TriggerEventListener listener, Sensor sensor):请接受触发事件的触发传感器。
- SensorEventSensorEvent:是一个数据结构,包含了传感器输出到应用的信息;
- accuracy:传感器输出的精度分为四个等级。在这种情况下,accuracy 指的就是输出数据的可靠程度,而不是与物理值的接近程度。可能的 accuracy 值有如下几种(SensorManage 中):
SENSOR_STATUS_ACCURACY_HIGH
SENSOR_STATUS_ACCURACY_MEDIUM
SENSOR_STATUS_ACCURACY_LOW
SENSOR_STATUS_UNRELIABLE
精确度不可靠并不意味着传感器的损坏,有可能是周围环境的变化而引起的。
sensor:传感器对象 Sensor 的对象。timestamp SensorEvent 发生的时间,以毫秒为单位。
values:表示传感器数据的数组。数据的大小以及数据的含义取决于产生数据的传感器。
四、常见的类型文章来源:https://www.toymoban.com/news/detail-531738.html
目前 常用Android 设备支持的传感器类型有很多,但是有些手机设备支持的类型也很少,如下:文章来源地址https://www.toymoban.com/news/detail-531738.html
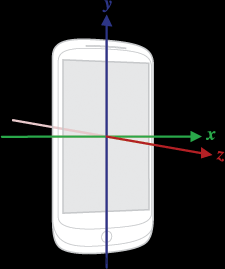
- TYPE_ACCELEROMETER 加速度传感器,又叫 G-sensor,该数值包含地心引力的影响,单位是 m/s2,测量应用于设备 x 、y、z 轴上的加速度。将手机平放在桌面上,x 轴默认为0,y 轴默认0,z 轴默认9.81。将手机朝下放在桌面上,z 轴为-9.81。将手机向左倾斜,x 轴为正值。将手机向右倾斜,x 轴为负值。将手机向上倾斜,y 轴为负值。将手机向下倾斜,y 轴为正值。
- TYPE_AMBIENT_TEMPERATURE 温度传感器 ,单位是 ℃,返回当前的温度。
- TYPE_GAME_ROTATION_VECTOR 游戏动作传感器,用来探测运动而不必受到电磁干扰的影响,因为它并不依赖于磁北极。
- TYPE_GEOMAGNETIC_ROTATION_VECTOR 地磁旋转矢量传感器 ,提供手机的旋转矢量,当手机处于休眠状态时,仍可以记录设备的方位。
- TYPE_GRAVITY 重力传感器,简称 GV-sensor,单位是 $m/s^2%,测量应用于设备X、Y、Z轴上的重力。在地球上,重力数值为9.8,
- TYPE_GYROSCOPE 陀螺仪传感器,叫做Gyro-sensor,返回x、y、z三轴的角加速度数据。单位是 radians/second。
- TYPE_GYROSCOPE_UNCALIBRATED 未校准陀螺仪传感器 ,提供原始的、未校准、补偿的陀螺仪数据,用于后期处理和融合定位数据。
- TYPE_LIGHT 光线感应传感器,检测实时的光线强度 ,光强单位是lux,其物理意义是照射到单位面积上的光通量。
- TYPE_LINEAR_ACCELERATION 线性加速度传感器,简称LA-sensor。线性加速度传感器是加速度传感器减去重力影响获取的数据。单位是 m/s2。
- TYPE_MAGNETIC_FIELD 磁力传感器,简称为M-sensor,返回 x、y、z 三轴的环境磁场数据。该数值的单位是微特斯拉(micro-Tesla),用uT表示。单位也可以是高斯(Gauss),1Tesla=10000Gauss。硬件上一般没有独立的磁力传感器,磁力数据由电子罗盘传感器提供(E-compass)。电子罗盘传感器同时提供方向传感器数据。
- TYPE_MAGNETIC_FIELD_UNCALIBRATED 未校准磁力传感器 ,提供原始的、未校准的磁场数据。
- TYPE_ORIENTATION 方向传感器,简称为O-sensor,返回三轴的角度数据,方向数据的单位是角度。为了得到精确的角度数据,E-compass 需要获取 G-sensor 的数据,经过计算生产 O-sensor 数据,否则只能获取水平方向的角度。方向传感器提供三个数据,分别为azimuth、pitch和roll:azimuth: 方位,返回水平时磁北极和 Y 轴的夹角,范围为0°至360°。0°为北,90°为东,180°为南,270°为西。pitch: x 轴和水平面的夹角,范围为-180°至180°。当 z 轴向 y 轴转动时,角度为正值。roll: y 轴和水平面的夹角,由于历史原因,范围为-90°至90°。当 x 轴向 z 轴移动时,角度为正值。
- TYPE_PRESSURE 压力传感器 ,单位是hPa(百帕斯卡),返回当前环境下的压强 。
- TYPE_PROXIMITY 接近传感器检测物体与手机的距离 ,单位是厘米。一些接近传感器只能返回远和近两个状态,因此,接近传感器将最大距离返回远状态,小于最大距离返回近状态。
- TYPE_RELATIVE_HUMIDITY 湿度传感器 ,单位是 %,来测量周围环境的相对湿度。
- TYPE_ROTATION_VECTOR 旋转矢量传感器,简称RV-sensor。旋转矢量代表设备的方向,是一个将坐标轴和角度混合计算得到的数据。RV-sensor输出三个数据:xsin(theta/2)ysin(theta/2)z*sin(theta/2)sin(theta/2)是 RV 的数量级。RV 的方向与轴旋转的方向相同。RV 的三个数值,与cos(theta/2)组成一个四元组。
- TYPE_SIGNIFICANT_MOTION 特殊动作触发传感器。
- TYPE_STEP_COUNTER 计步传感器 ,用于记录激活后的步伐数。
- TYPE_STEP_DETECTOR 步行检测传感器 ,用户每走一步就触发一次事件。
- TYPE_TEMPERATURE 温度传感器 ,目前已被* TYPE_AMBIENT_TEMPERATURE替代。
到了这里,关于Android sensor 传感器简介的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!