目录
1.小车驱动主要是通过L9110S模块来驱动电机
motor.c
2.我们可以加入串口控制电机驱动(重写串口接收回调函数,和重定向printf)
Uart.c
main.c
3.点动功能
uart.c
main.c
为什么使用的是HAL_Delay()要设置滴答定时器的中断优先级呢?
4.小车PWM调速,
6.跟随功能
7.避障功能
超声波测距流程
CSB.c
SG90.c
main.c
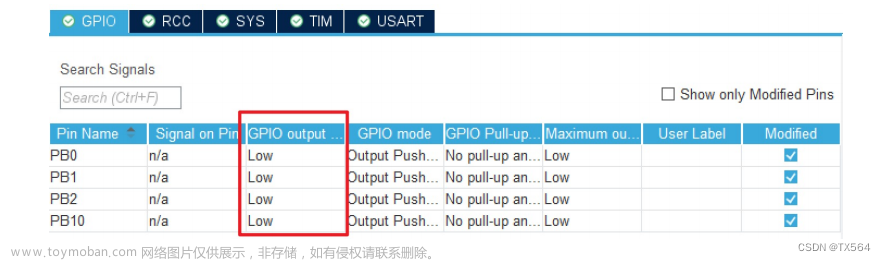
1.小车驱动主要是通过L9110S模块来驱动电机
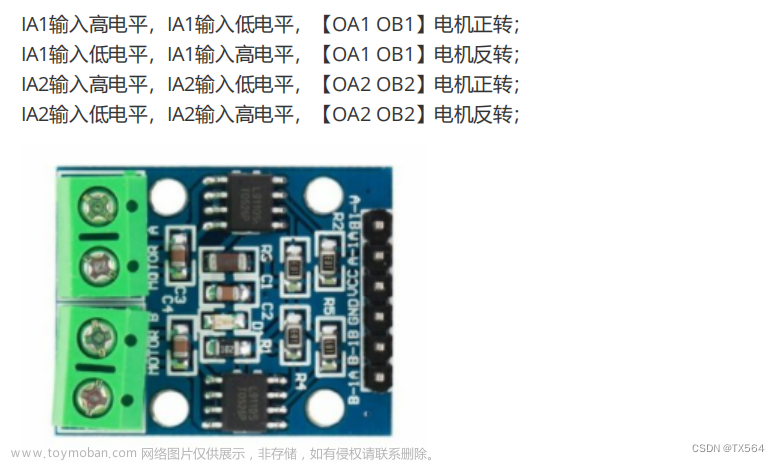
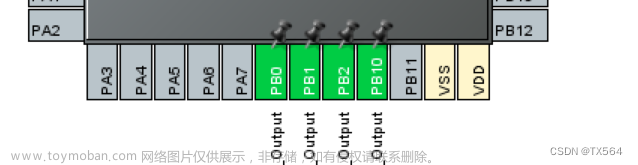
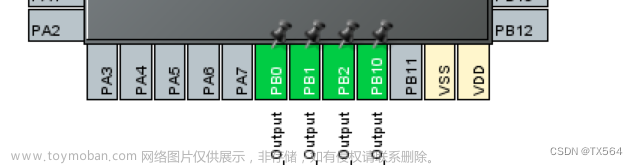
本次STM32与L9110s的接线是:
B-1A -- PB0B-1B -- PB1A-1A -- PB2A-1B -- PB10
通过对GPIO口的配置,可以写出电机的驱动程序(全速模式)
motor.c
#include "motor.h"
#include "gpio.h"
void GoForward(void)
{
//右轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
//左轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}
void GoBack(void)
{
//右轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_SET);
//左轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_SET);
}
void GoLeft(void)
{
//右轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
//左轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}
void GoRight(void)
{
//右轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
//左轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}
void Stop(void)
{
//右轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
//左轮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_10,GPIO_PIN_RESET);
}2.我们可以加入串口控制电机驱动(重写串口接收回调函数,和重定向printf)
加入串口控制,我们需要在cubeMX中开启串口中断用于接收串口发来的数据
Uart.c
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
#define SIZE 12
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
char buffer[SIZE];
// 接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
{
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
// printf("1");
// 车控指令
if(!strcmp((const char*)UART1_RX_Buffer, "M1"))
{
printf("Forwad......");
GoForward();
}
else if(!strcmp((const char*)UART1_RX_Buffer, "M2"))
{
printf("Back......");
GoBack();
}
else if(!strcmp((const char*)UART1_RX_Buffer, "M3"))
{
printf("Left......");
GoLeft();
}
else if(!strcmp((const char*)UART1_RX_Buffer, "M4"))
{
printf("Right......");
GoRight();
}
else if(!strcmp((const char*)UART1_RX_Buffer, "Stop"))
{
printf("Stop......");
Stop();
}
memset(UART1_RX_Buffer, 0, UART1_REC_LEN);
UART1_RX_STA = 0;
}
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}main.c
extern uint8_t buf;
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart1, &buf, 1);//开启串口接收
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}切记主函数内需要调用开启串口接收函数!!!!!!
将HC08模块接入STM32,连接蓝牙就可以通过蓝牙APP控制
3.点动功能
如果用蓝牙app实现遥控车模式,我们会发现,点了前进按钮,小车会一直前进,按下左转会一直左转,而遥控车应该是点动功能,按一下向前就向前走一下,一直按一直走
我的思路是,主程序一直跑Stop(); 接收到来自蓝牙(串口)的数据后执行动作(几毫秒),从而实现点动
uart.c
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
#define SIZE 12
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
char buffer[SIZE];
// 接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
{
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
// printf("1");
// 车控指令
if(!strcmp((const char*)UART1_RX_Buffer, "M1"))
{
printf("Forwad......");
GoForward();
HAL_Delay(10);
}
else if(!strcmp((const char*)UART1_RX_Buffer, "M2"))
{
printf("Back......");
GoBack();
HAL_Delay(10);
}
else if(!strcmp((const char*)UART1_RX_Buffer, "M3"))
{
printf("Left......");
GoLeft();
HAL_Delay(10);
}
else if(!strcmp((const char*)UART1_RX_Buffer, "M4"))
{
printf("Right......");
GoRight();
HAL_Delay(10);
}
else if(!strcmp((const char*)UART1_RX_Buffer, "Stop"))
{
printf("Stop......");
Stop();
HAL_Delay(10);
}
memset(UART1_RX_Buffer, 0, UART1_REC_LEN);
UART1_RX_STA = 0;
}
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}main.c
extern uint8_t buf;
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart1, &buf, 1);//开启串口接收
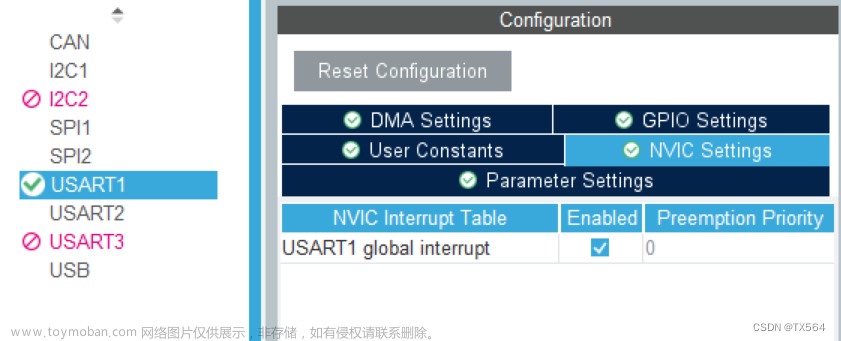
HAL_NVIC_SetPriority(SysTick_IRQn,0,0);//提高滴答定时器优先级
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
Stop();
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}提高滴答定时器优先级,这样的话在串口中断中使用HAL_Delay()不会出现卡死的bug
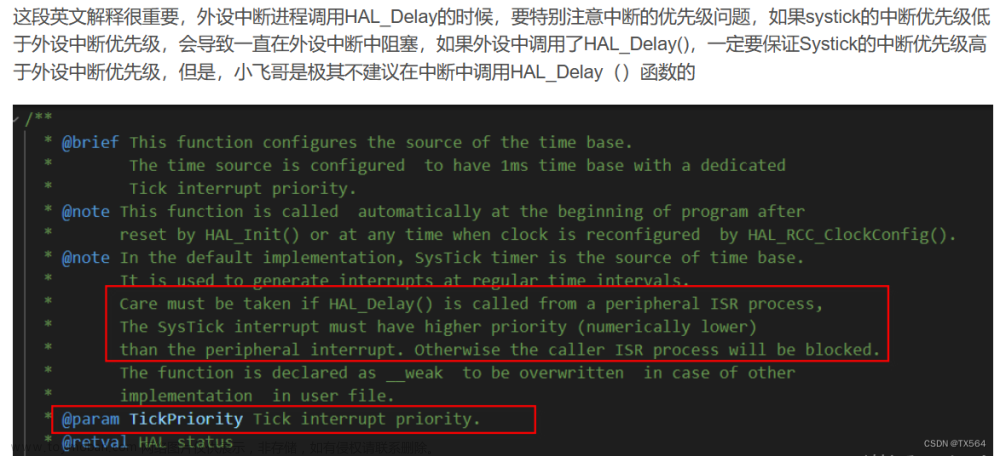
为什么使用的是HAL_Delay()要设置滴答定时器的中断优先级呢?
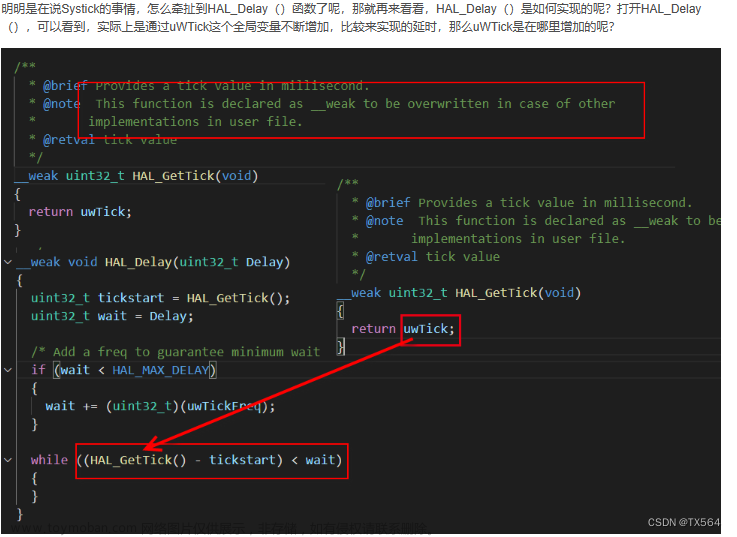
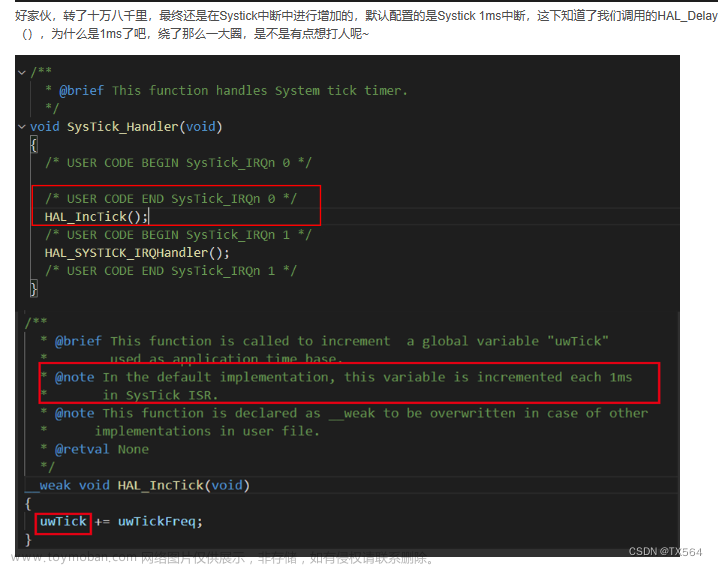
从英文解释中(别说看不懂哈),Systick被配置为系统时基,并且被配置为了1ms,做技术,要有刨根问底的精神,奥利给,继续跟进去看看
关于滴答定时器可以看这篇文章,us级延时怎么实现
(77条消息) HAL库与Cubemx系列|Systick-系统滴答定时器详解_hal库 systick 中断_小飞哥玩嵌入式的博客-CSDN博客https://blog.csdn.net/qq_16519885/article/details/117756815?ops_request_misc=&request_id=&biz_id=102&utm_term=HAL_Delay%E6%98%AF%E6%BB%B4%E7%AD%94%E5%AE%9A%E6%97%B6%E5%99%A8%E5%90%97&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduweb~default-2-117756815.142%5Ev83%5Epc_search_v2,239%5Ev2%5Einsert_chatgpt&spm=1018.2226.3001.4187

//使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{
/* 使能定时器2计数 */
__HAL_TIM_ENABLE(&htim2);
__HAL_TIM_SetCounter(&htim2, 0);
while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );
/* 关闭定时器2计数 */
__HAL_TIM_DISABLE(&htim2);
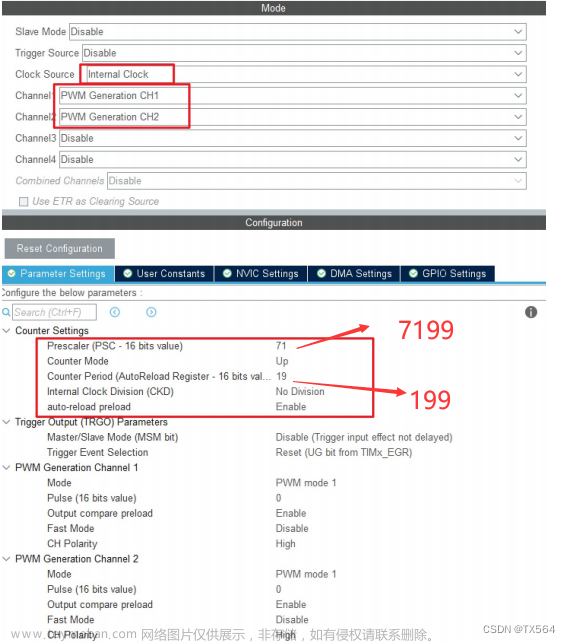
}4.小车PWM调速,
通过实验我们又发现了bug,如果是全速驱动的话,小车转弯,比如左转就会左边轮子不动右边动,理论上是这样的,但是实际上会出现小车转弯一卡一卡的bug,于是我想到了用PWM调速,转弯的时候左右轮分开调速,左转就左轮速度低于右轮,右转就右轮速度低于左轮
STM32与51单片机不同,STM32具有硬件PWM调速
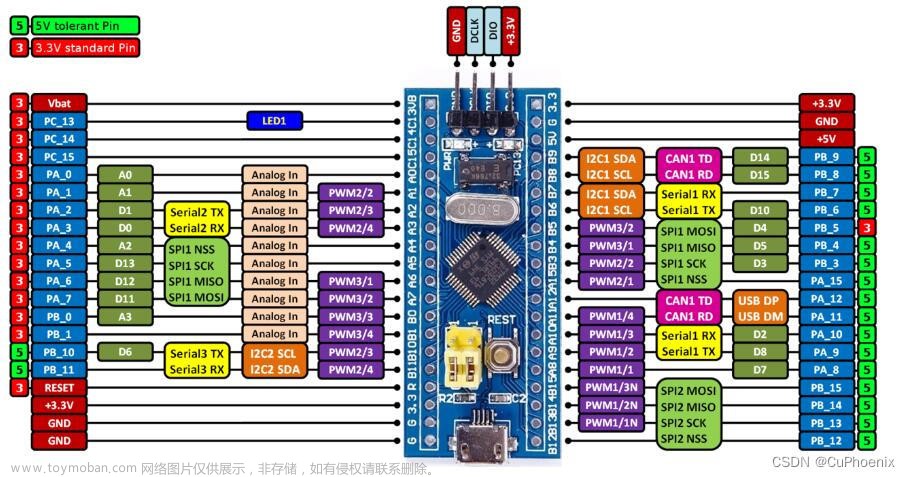
根据查数据手册可知,我使用的是TIM2的CH1和CH2,CH1,CH2分别对应左右轮
更改后连线为
B-1A -- PA0B-1B -- PB1A-1A -- PA1A-1B -- PB10
具体PWM可以参考之前写的PWM实现呼吸灯文章
(77条消息) [STM32F103C8T6]PWM呼吸灯_stm32f103c8t6呼吸灯_TX564的博客-CSDN博客https://blog.csdn.net/weixin_63303786/article/details/129047166?spm=1001.2014.3001.5502
根据前面L9110s模块的运用可知,A-1A,A-1B,B-1A,B-2B是分别为一高一低电平才能驱动
当PWM调速时,PWM使用的TIM2对应端口PA0,PA1会出现占空比,占空比内为高电平,那么其他两个IO口就必须为低电平,才能驱动L9110s,所以PWM调速,必须将对应电机驱动的所有的IO口都拉低
PWM主要用的两个函数 一个是PWM启动函数,一个是PWM比较函数
HAL_TIM_PWM_Start ( & htim2 , TIM_CHANNEL_1 );HAL_TIM_PWM_Start ( & htim2 , TIM_CHANNEL_2 );__HAL_TIM_SetCompare ( & htim2 , TIM_CHANNEL_1 , 8 );//8是PWM_Val的值,小于8都是高电平,大于8是低电平,这个数的值要小于设定的 CCRx
void main()
{
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
while(1)
{
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,8);
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,15);
HAL_Delay(1000);
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,15);
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,8);
HAL_Delay(1000);
}
}解决过弯一卡一卡的bug就可以将
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,8);
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,15);替换motor.c中的GPIO_PIN_WritePin函数
5.小车循迹功能
小车循迹主要用到的模块是循迹模块

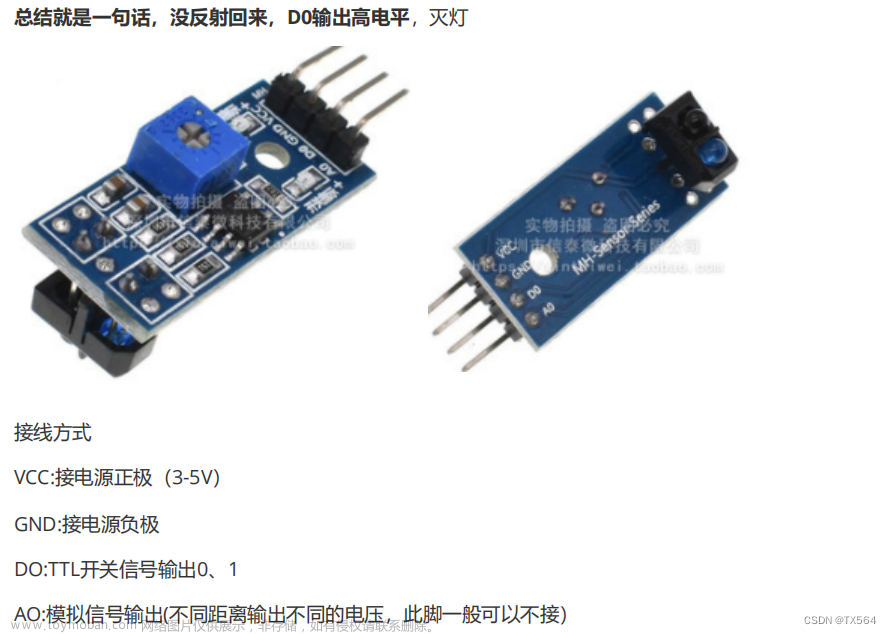
小车循迹主要是通过循迹模块,黑色会续收红外线,当红外线被吸收,就没法返回,于是模块输出高电平,灯灭,如果是白色区域,红外线会返回,灯亮,输出低电平
本次接线是将两个循迹模块的DO接入PB5,PB6
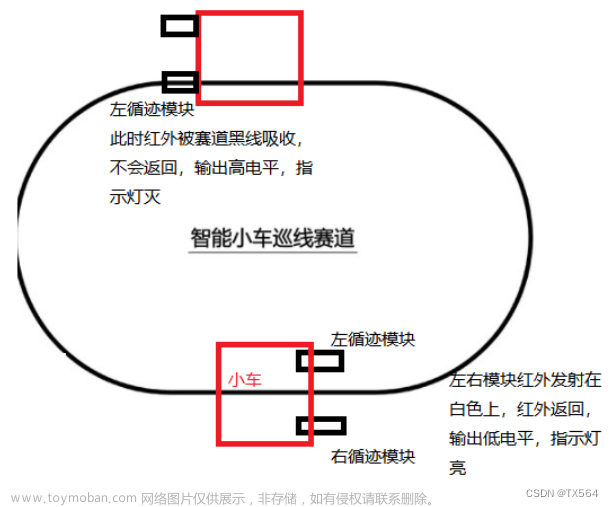
于是循迹的逻辑就是,左右两边各安一个循迹模块,当两个模块都返回红外线输出低电平灯亮的时候,小车向前进,如果左边模块没有返回红外线高电平灯灭,右边模块返回红外线低电平灯亮,那么就说明遇到左转弯道,左转,相反就右转----->哪边高电平往哪边转
#define LeftWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_3)
#define RightWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_4)
void xunji(void)
{
if(LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_RESET)
{
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,19);
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,19);
}
if(LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_RESET)
{
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,15);
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,8);
}
if(LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_SET)
{
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,8);
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,15);
}
if(LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_SET)
{
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,0);
__HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,0);
}
}
// main函数里
while (1)
{
xunji();
}6.跟随功能
跟随功能的实现主要是跟随模块

哪边低电平,往哪边转(因为跟随模块是有物体挡着才会返回红外线,返回为低电平)
#define LeftWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_5)
#define RightWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_6)
void gensui(void)
{
if(LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_RESET)
goForward();
if(LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_RESET)
goRight();
if(LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_SET)
goLeft();
if(LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_SET)
stop();
}
// main函数里
while (1)
{
gensui();
}7.避障功能
避障功能主要是依靠SG90舵机和超声波实现的,当超声波测距小于一个值,比如35cm,SG90舵机开始转动角度,实现超声波摇头,摇头:显示中间位,然后左转,然后右转
超声波测距流程
1.Trig至少10us的高电平
2.发送波,定时器启动,开始计时
启动定时器的函数:HAL_TIM_Base_Start(&htim2);//启动定时器2
开始计算时间函数:__HAL_TIM_SetCounter(&htim2,0);//计算时间
2.1怎么判断是否发送波了呢?:当波发送出去echo会由低电平变为高电平 while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7) == GPIO_PIN_RESET);//卡低电平
3.接收到波,定时器关闭停止计时
停止定时器的函数:HAL_TIM_Base_Stop(&htim2);//停止定时器
3.1怎么判断接收到波了呢?:当接收到波echo会由高电平变为低电平
while(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7) == GPIO_PIN_SET);//卡高电平
4.读取定时器计时时间
获取时间的函数:cnt = __HAL_TIM_GetCounter(&htim2);
5.distance = (340m/s * 时间)/2(注意换算单位 100cm/1000000us)
CSB.c
//使用TIM2来做us级延时函数
void TIM2_Delay_us(uint16_t n_us)
{
/* 使能定时器2计数 */
__HAL_TIM_ENABLE(&htim2);
__HAL_TIM_SetCounter(&htim2, 0);
while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) );
/* 关闭定时器2计数 */
__HAL_TIM_DISABLE(&htim2);
}
double get_distance(void)
{
int cnt=0;
//1. Trig ,给Trig端口至少10us的高电平
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET);//拉高
TIM2_Delay_us(20);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET);//拉低
//2. echo由低电平跳转到高电平,表示开始发送波
//波发出去的那一下,开始启动定时器
while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_RESET);//等待输入电平拉高
HAL_TIM_Base_Start(&htim2);//启动定时器2
__HAL_TIM_SetCounter(&htim2,0);//计算时间
//3. 由高电平跳转回低电平,表示波回来了
while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_SET);//等待输入电平变低
//波回来的那一下,我们开始停止定时器
HAL_TIM_Base_Stop(&htim2);//停止定时器
//4. 计算出中间经过多少时间
cnt = __HAL_TIM_GetCounter(&htim2);//获取时间
//5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us)
return (cnt*340/2*0.000001*100); //单位:cm
}SG90.c
void initSG90(void)
{
HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_4); //启动定时器4,启动PWM
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 9); //将舵机置为90度
}
void sgMiddle(void)
{
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 9); //将舵机置为75度
}
void sgRight(void)
{
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5); //将舵机置为0度
}
void sgLeft(void)
{
__HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 14); //将舵机置为135度
}main.c
#define MIDDLE 0
#define RIGHT 2
#define LEFT 1
int main(void)
{
/* USER CODE BEGIN 1 */
char dir;
double disMiddle;
double disLeft;
double disRight;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM4_Init();
MX_TIM2_Init();
/* USER CODE BEGIN 2 */
initSG90();//一开始先让超声波在中间位
HAL_Delay(1000);
/* USER CODE END 2 */
void csb(void)
{
/*为了不歪头卡死,每次必须测完回到中间位*/
if(dir != MIDDLE){
sgMiddle();
dir = MIDDLE;
HAL_Delay(300);
}
/*为了不歪头卡死,每次必须测完回到中间位*/
disMiddle = get_distance();
if(disMiddle > 35){
//前进
GoForward();
}else if(disMiddle < 10){
GoBack();
}else
{
//停止
Stop();
//测左边距离
sgLeft();
HAL_Delay(300);
disLeft = get_distance();
sgMiddle();
HAL_Delay(300);
sgRight();
dir = RIGHT;
HAL_Delay(300);
disRight = get_distance();
if(disLeft < disRight){
GoRight();
HAL_Delay(150);
Stop();
}
if(disRight < disLeft){
GoLeft();
HAL_Delay(150);
Stop();
}
}
}
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
csb();
HAL_Delay(50);//必须要延时,不然执行代码速度太快就会一直前进或者后退,不会摇头
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}将所有模块的函数封装好后,可以通过按键或者其他方式切换循迹,跟随,避障模式
#define Key_On 0
#define Key_Off 1
unsigned char Scanf_Key(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{
unsigned int status;
status = HAL_GPIO_ReadPin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin);
if(status == GPIO_PIN_RESET)
return 0;
else if(status == GPIO_PIN_SET)
return 1;
}
void main()
{
while(1)
{
if(Scanf_Key(GPIOA,GPIO_PIN_0) == Key_On)
{
csb();
}
if(Scanf_Key(GPIOA,GPIO_PIN_1) == Key_On)
{
gensui();
}
if(Scanf_Key(GPIOA,GPIO_PIN_3) == Key_On)
{
xunji();
}
}
}测速功能
测速功能主要是用测速模块配合码盘实现
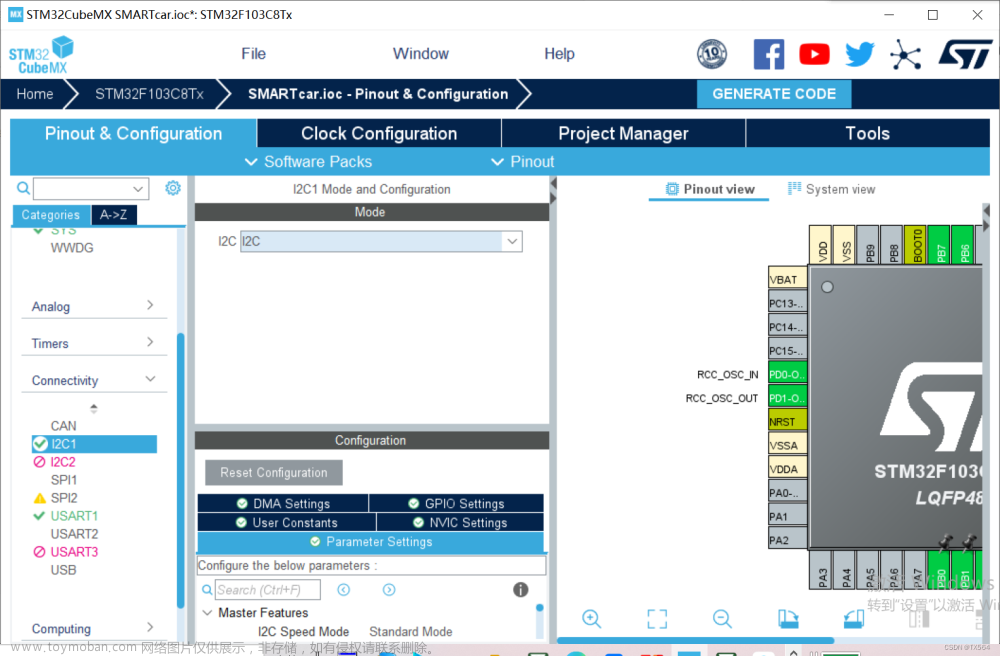
配置cubeMX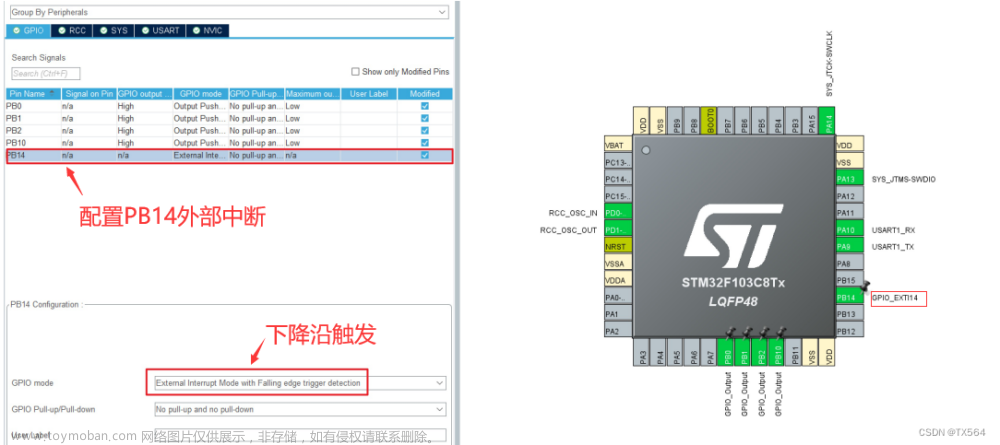
使用定时器计时1s,获取码盘每1s转了多少圈,通过计算可获得速度
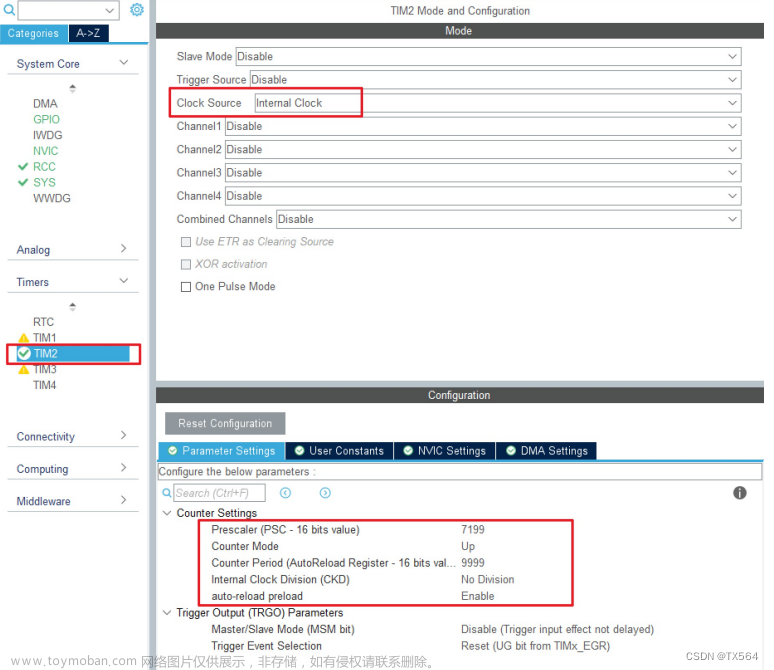 定时器公式:
定时器公式:
T = {(PSC+1)*(Counter Period + 1)}/72000000HZ
轮子走一圈,经过一个周长, C = 2x3.14x 半径 = 3.14 x 直径( 6.5cm )对应的码盘也转了一圈,码盘有 20 个格子,每经过一个格子,会遮挡(高电平)和不遮挡(低电平),那么一个脉冲就是走了 3.14 * 6.5 cm /20 = 1.0205CM定时器可以设计成一秒,统计脉冲数,一个脉冲就是 1cm假设一秒有 80 脉冲,那么就是 80cm/s
开启定时器中断和外部中断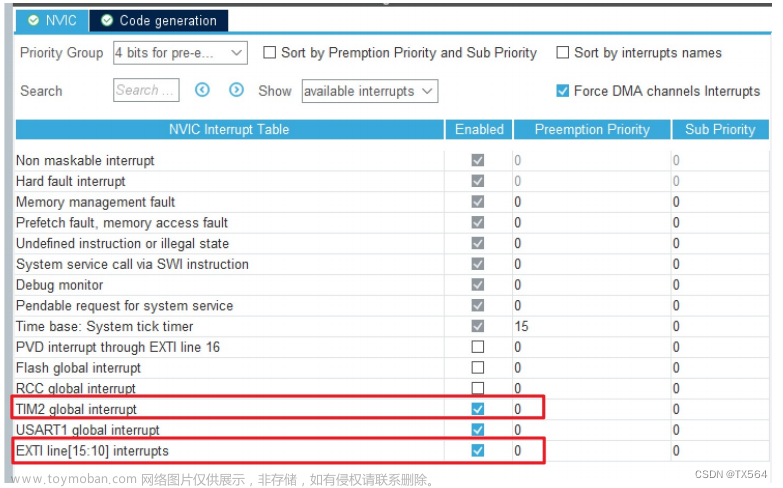
代码实现
先找到定时器中断服务函数,外部中断服务函数,再重写回调函数
void HAL_GPIO_EXIT_Callback(uint_t GPIO_pin)
{
if(GPIO_pin == GPIO_PIN_14)//判断是不是PB14产生的中断
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_14) == GPIO_PIN_RESET)//判断PB14是否为低电平,从而判断是否产生下降沿
SpeedCnt++;// dis = SpeedCnt * time 定时器1s产生中断所以dis = SpeedCnt
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
printf("speed:%d\r\n",SpeedCnt);//重定向printf,打印到串口
SpeedCnt = 0;
}
int main(void)
{
HAL_Init();
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq() / 1000); //1ms
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM2_Init();
HAL_UART_Receive_IT(&huart1, &buf, 1);//开启串口接收中断
HAL_TIM_Base_Start_IT(&htim2);//开启定时器中断
while (1)
{
}
}
通过oled显示实时的车速
oled.c文章来源:https://www.toymoban.com/news/detail-533808.html
#include "oled.h"
#include "i2c.h"
#include "oledfont.h"
void Oled_Write_Cmd(uint8_t dataCmd)
{
HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x00, I2C_MEMADD_SIZE_8BIT,
&dataCmd, 1, 0xff);
}
void Oled_Write_Data(uint8_t dataData)
{
HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x40, I2C_MEMADD_SIZE_8BIT,
&dataData, 1, 0xff);
}
void Oled_Init(void)
{
Oled_Write_Cmd(0xAE);//--display off
Oled_Write_Cmd(0x00);//---set low column address
Oled_Write_Cmd(0x10);//---set high column address
Oled_Write_Cmd(0x40);//--set start line address
Oled_Write_Cmd(0xB0);//--set page address
Oled_Write_Cmd(0x81); // contract control
Oled_Write_Cmd(0xFF);//--128
Oled_Write_Cmd(0xA1);//set segment remap
Oled_Write_Cmd(0xA6);//--normal / reverse
Oled_Write_Cmd(0xA8);//--set multiplex ratio(1 to 64)
Oled_Write_Cmd(0x3F);//--1/32 duty
Oled_Write_Cmd(0xC8);//Com scan direction
Oled_Write_Cmd(0xD3);//-set display offset
Oled_Write_Cmd(0x00);//
Oled_Write_Cmd(0xD5);//set osc division
Oled_Write_Cmd(0x80);//
Oled_Write_Cmd(0xD8);//set area color mode off
Oled_Write_Cmd(0x05);//
Oled_Write_Cmd(0xD9);//Set Pre-Charge Period
Oled_Write_Cmd(0xF1);//
Oled_Write_Cmd(0xDA);//set com pin configuartion
Oled_Write_Cmd(0x12);//
Oled_Write_Cmd(0xDB);//set Vcomh
Oled_Write_Cmd(0x30);//
Oled_Write_Cmd(0x8D);//set charge pump enable
Oled_Write_Cmd(0x14);//
Oled_Write_Cmd(0xAF);//--turn on oled panel
}
void Oled_Screen_Clear(void)
{
int i,n;
Oled_Write_Cmd (0x20); //set memory addressing mode
Oled_Write_Cmd (0x02); //page addressing mode
for(i=0;i<8;i++){
Oled_Write_Cmd(0xb0+i); //PAGE0 - PAGE7
Oled_Write_Cmd(0x00); //每个page从第0列开始
Oled_Write_Cmd(0x10); //每个page从第0列开始
for(n=0;n<128;n++)Oled_Write_Data(0x00);//每个page的127列全写0
}
}
/*移植源代码*/
/显示单个字符/
void Oled_Show_Char(char row,char col,char oledChar){ //row*2-2
unsigned int i;
Oled_Write_Cmd(0xb0+(row*2-2)); //page 0
Oled_Write_Cmd(0x00+(col&0x0f)); //low
Oled_Write_Cmd(0x10+(col>>4)); //high
for(i=((oledChar-32)*16);i<((oledChar-32)*16+8);i++){
Oled_Write_Data(F8X16[i]); //写数据oledTable1
}
Oled_Write_Cmd(0xb0+(row*2-1)); //page 1
Oled_Write_Cmd(0x00+(col&0x0f)); //low
Oled_Write_Cmd(0x10+(col>>4)); //high
for(i=((oledChar-32)*16+8);i<((oledChar-32)*16+8+8);i++){
Oled_Write_Data(F8X16[i]); //写数据oledTable1
}
}
/显示字符串/
void Oled_Show_Str(char row,char col,char *str){
while(*str!=0){
Oled_Show_Char(row,col,*str);
str++;
col += 8;
}
}
oledfont.h文章来源地址https://www.toymoban.com/news/detail-533808.html
const unsigned char F8X16[]=
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 0
0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 1
0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 2
0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 3
0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 4
0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 5
0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 6
0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 7
0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 8
0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 9
0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 10
0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 11
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 12
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 13
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 14
0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 15
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 16
0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 17
0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 18
0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 19
0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 20
0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 21
0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 22
0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 23
0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 24
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 25
0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 26
0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 27
0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 28
0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 29
0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 30
0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 31
0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 32
0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 33
0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 34
0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 35
0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 36
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 37
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 38
0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 39
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 40
0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 41
0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 42
0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 43
0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 44
0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 45
0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 46
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 47
0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 48
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 49
0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 50
0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 51
0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 52
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 53
0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 54
0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 55
0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 56
0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 57
0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 58
0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 59
0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\ 60
0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 61
0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 62
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 63
0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 64
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 65
0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 66
0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 67
0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 68
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 69
0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 70
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 71
0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 72
0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 73
0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 74
0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 75
0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 76
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 77
0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 78
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 79
0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 80
0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 81
0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 82
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 83
0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 84
0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 85
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 86
0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 87
0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 88
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 89
0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 90
0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 91
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 92
0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 93
0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};#include "oled.h"
#include "main.h"
#include "i2c.h"
#include "tim.h"
#include "gpio.h"
char speedMES[24];
void HAL_GPIO_EXIT_Callback(uint_t GPIO_pin)
{
if(GPIO_pin == GPIO_PIN_14)//判断是不是PB14产生的中断
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_14) == GPIO_PIN_RESET)//判断PB14是否为低电平,从而判断是否产生下降沿
SpeedCnt++;// dis = SpeedCnt * time 定时器1s产生中断所以dis = SpeedCnt
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
sprintf(speedMES,"speed:%dcm/s",SpeedCnt);//将数据以speed:xx的形式传给speedMES数组
Oled_Show_Str(2,2,speedMES);
printf("speed:%d\r\n",SpeedCnt);//重定向printf,打印到串口
SpeedCnt = 0;
}
int main(void)
{
HAL_Init();
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq() / 1000); //1ms
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM2_Init();
HAL_UART_Receive_IT(&huart1, &buf, 1);//开启串口接收中断
HAL_TIM_Base_Start_IT(&htim2);//开启定时器中断
Oled_Init();
Oled_Screen_Clear();//实时显示其实就是不断刷屏显示新的数据
while (1)
{
}
}
到了这里,关于[STM32F103C8T6]基于stm32的循迹,跟随,避障智能小车的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
![[附源码] STM32F103C8T6+外接MCP4725 外部DAC](https://imgs.yssmx.com/Uploads/2024/02/764055-1.png)