一、概述
ICP 算法最早由 Arun 等于 1987 年提出,这种点集与点集坐标系匹配的算法被证明是解决复杂配准问题的关键方法。GICP 点云融合算法与 ICP 算
法目标一致,但实现有所区别。ICP 的理论推导严谨,但对点云要求比较严格,在实验中可能无法做到两个点集一一对应(实际上,很多时候由于点云的半随机性,很难在两次扫描中找到完全一致的同名点);GICP 统一了各种点云的对应情况,故 ICP 算法可以被视为 GICP 算法的一种情况。当然,在特殊情况下,GICP也会“退化”为 ICP。文章来源:https://www.toymoban.com/news/detail-536756.html
二、实验
1.代码
代码如下(示例):文章来源地址https://www.toymoban.com/news/detail-536756.html
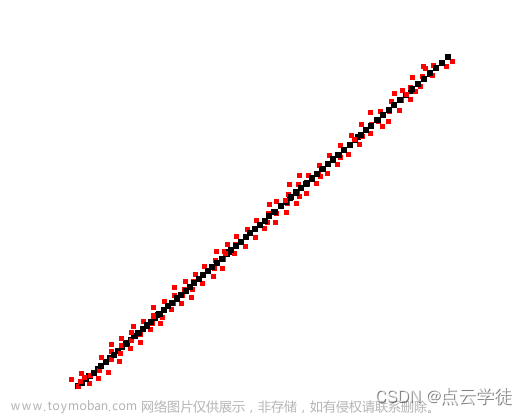
#include到了这里,关于PCL点云处理之Gicp配准(附代码,实验结果)(九十一)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!