介绍

NI Softmotion介绍
LabVIEW NI SoftMotion 采用高级功能块API (应用程序接口) 便于编写运动程序,该功能块API基于由PLCopen 定义的 Motion Control Library 。SoftMotion 包括用于直线、弧线和轮廓运动的功能块及用于进行电子传动、电子凸轮等高级运行的功能块。该模块还具有设计定制运动的高级功能,如轨迹生成、样条插值、位置速度控制及编码等。
使用LabVIEW NI SoftMotion模块和基于实时或FPGA的系统,例如NI CompactRIO,创建独立的运动控制系统,或使用NI Motion Assistant和基于DSP的插入式运动控制板卡交互式地建立运动控制应用程序的原型
LabVIEW NI SoftMotion 能够与CompactRIO 无缝集成,更好地实现高级运动控制。使用C 系列新款驱动接口模块,可以充分利用CompactRIO 的优势来实现FPGA 编程自动化,在实际应用中融合FPGA 的可靠性,同步性及高速控制等优点。另外,若想使用第三方硬件,LabVIEW NI SoftMotion 还可运行于定制轴。
C系列新款驱动接口模块直接与伺服和步进驱动设备连接,易于将新型或现有电机及驱动器集成到运动系统当中。其中,NI 9512 模块可连接步进电机及其驱动器,而NI 9514、NI 9516 模块分别具有单个和两个反馈编码器,具有与伺服电机及其驱动器相连的接口。由于运动控制计算过程紧密,驱动接口模块可实现板上计算,从而释放了系统计算能力,提高了性能。而且,驱动接口模块配套使用了NI 9144 确定性以太网扩展机箱(具有两个以太网端口),可凭借CompactRIO、NI 3100 工业用控制器及实时PXI 控制器组成菊花链式多机箱系统完成分布式运动控制。
用于NI SoftMotion函数模块的API是非阻塞、异步的API,可以用来与您的运动控制硬件进行通信。
SoftMotion for SolidWorks介绍
NI SoftMotion for SolidWorks 能够使机械,电气和控制工程师们合作创造一个运动控制系统的虚拟原型,其融合了机械仿真,运动控制软件和传感器反馈。
SoftMotion for SolidWorks的LabVIEW NI SoftMotion模块的典型应用包括:
•运动轨迹设计您可以使用电子齿轮和凸轮来构建复杂的运动轮廓,其中包含一系列顺序或并发的运动操作,这些操作由多轴直线运动,轮廓运动,弧形运动甚至复杂运动组成。
•可视化 通过使用在LabVIEW中设计的运动控制配置文件和时序/定序逻辑对3D SolidWorks装配体进行动画处理,可以快速评估机器总体概念设计的可行性。将工作机器可视化为虚拟原型有助于在开发的早期就验证机器的总体概念设计。这样可以促进与客户以及设计团队成员之间更好的沟通,并有助于封闭设计要求,必备功能和工程设计之间的循环。
•碰撞检测使用SolidWorks中的碰撞检测功能,您可以使用实际的3D CAD模型来验证运动轮廓设计。您可以检查干扰,评估是否需要互锁控制逻辑以防止发生碰撞,优化运动曲线以最大程度地减少不必要的停滞时间,快速评估假设情况,安全地测试新的控制系统逻辑而不会损坏物理机器。在将机器设计,原型化并部署到现场后,还可以使用碰撞检测来验证新的运动曲线,然后再将其下载到在客户现场运行的机器上。这样可以减少由于编程错误而导致计划外停机的风险。
•吞吐时间研究 通过使用包括实际运动曲线约束和机器机械动力学(例如质量和摩擦)在内的仿真来验证运动系统设计,可以准确地计算出机器的循环时间吞吐量。
•电动机,驱动器和传动装置的尺寸 电动机扭矩和速度要求取决于运动曲线的加速特性以及有效载荷和传动装置组件(例如丝杠)的机械动力学。使用NI SoftMotion for SolidWorks,您可以为运动曲线计算所需的电动机转矩和速度图表。
环境
- LabVIEW 2018(32位);
- LabVIEW SoftMotion 2018;
- Solidworks 2021;
- 无cRIO电机等硬件;
例程测试
启动SolidWorks并从D:\Program Files (x86)\National Instruments\LabVIEW 2018\examples\motion\SolidWorks\SolidWorks Files目录中打开Sorting Machine.SLDASM文件。
打开模型后,导航至选项-插件,并确保SolidWorks Motion和SolidWorks Simulation插件处于活动状态,打勾。
选择左下角的“ Motion Study 1”选项卡,并确保将“ Motion Study”类型下拉菜单设置为“ Motion 分析”。如果不是,会报下面的错误。

添加装配体
打开一个空的LabVIEW项目,然后在LabVIEW Project Explorer窗口中右键单击我的电脑,然后从快捷菜单中选择新建»SolidWorks装配体,以打开从装配体文件导入SolidWorks电机对话框。
选择SolidWorks装配体以添加到LabVIEW项目。如果当前打开了SolidWorks装配体,则从装配体文件输入轴对话框将包含该装配体的路径。如有必要,请单击浏览以选择其他程序集文件。
单击确定。选定的SolidWorks装配体将添加到“项目资源管理器”窗口中,包括SolidWorks运动算例中包含的所有电机。
添加轴
要使用模型中随附的SolidWorks电机进行仿真,您需要将电机与NI SoftMotion轴关联。使用NI SoftMotion功能块创建运动曲线时,将使用NI SoftMotion轴。完成以下步骤,将NI SoftMotion轴添加到项目中:
1.右键单击项目浏览器窗口中的我的电脑,然后从快捷菜单中选择新建»NI SoftMotion Axis以打开轴管理器对话框。
2.选择添加新轴,新轴将自动绑定到可用的SolidWorks电动机。
3.单击添加新轴,直到所有可用的SolidWorks电机都与NI SoftMotion轴相关联。
4.双击每个轴的轴名称,以更描述性地重命名该轴(例如,传送带,转台,X轴,Y轴)。
5.单击确定。所有轴均添加到Project Explorer窗口中,如图所示。
向项目添加坐标(可选)
您可以将NI SoftMotion轴分组为坐标空间,以便可以同时使用多个轴执行坐标移动。执行坐标移动时,将坐标空间用作运动应用程序的输入。
完成以下步骤以向项目添加坐标空间:
1.在“项目资源管理器”窗口中右键单击“我的电脑”,然后从快捷菜单中选择“新建»SoftMotion Coordinate Space… ”,以打开“配置坐标空间”对话框,如图所示。
2.使用箭头将X轴和Y轴从“可用轴”列移动到“坐标轴”列,如图5所示。如果需要,双击坐标空间名称以重命名坐标空间并为其指定一个描述性名称。
3.单击“确定”关闭“配置坐标空间”对话框,然后将新的坐标空间添加到LabVIEW项目中。现在,您的项目已经设置了应用程序所需的轴和坐标空间。
配置轴
与SolidWorks电动机关联的轴被假定为伺服电动机。由于轴与实际的硬件无关,因此您只需执行最少的配置即可上手。设置好仿真后,您可以更改轴上的配置设置,以便使用您创建的配置文件将其轻松部署到最终硬件上。完成X轴和Y轴的以下步骤以配置要在仿真中使用的轴:
1.在“项目资源管理器”窗口中右键单击轴,然后从快捷菜单中选择“属性”以打开“轴配置”对话框。图显示了SolidWorks轴的“轴配置”对话框的各部分。不适用于您的配置的项目显示为灰色。
2.在“轴配置”页面上,确认“轴已启用”(Axis Enabled)和“在过渡到活动模式时启用驱动器”(Enable Drive on Transition to Active Mode)复选框包含复选标记。当NI扫描引擎切换到活动模式时,这将自动激活所有轴。(您也可以在VI中使用Power功能块来激活和启用轴。)
3.单击“确定”关闭“轴配置”对话框。确保对X轴和Y轴SoftMotion轴均执行步骤1-3。
建立动作设定档并执行模拟
您可以使用NI SoftMotion»高级»功能块面板上的NI SoftMotion功能块为SolidWorks装配创建仿真运动轮廓。使用这些功能块,您可以执行直线运动,圆弧运动,轮廓运动,齿轮和凸轮操作,以及读取状态和数据信息。
运行和停止仿真
部署项目并运行VI将使用您创建的移动配置文件启动SolidWorks仿真。完成以下步骤,以部署和运行VI并启动SolidWorks仿真:
1.在“项目资源管理器”窗口中右键单击“我的电脑”项,然后选择“属性”以显示“我的电脑属性”对话框。
2.从“类别”列表中选择“扫描引擎”,然后在“在部署时启动扫描引擎”复选框中打勾。
3.单击“确定”关闭“我的电脑属性”对话框。
4.在“项目资源管理器”窗口中选择“我的电脑”,SolidWorks装配体,轴和坐标项,右键单击并从快捷菜单中选择“部署”。LabVIEW将部署VI使用的所有相关I / O资源和设置,将NI Scan Engine切换至活动模式,并启动SolidWorks仿真。如果显示任何冲突解决方案,请选择“应用”。为确保仿真正确部署,请始终部署NI SoftMotion轴,而不仅要部署“我的电脑”项。
5.在“项目资源管理器”窗口中右键单击SolidWorks装配体,然后选择同步到装配体…。
6.在“项目资源管理器”窗口中右键单击SolidWorks装配体,然后选择开始模拟以在SolidWorks中开始运动模拟。
7.运行VI。按下执行控件,LabVIEW将开始执行您创建的移动配置文件。对于后续的模拟,您可能需要通过选择实用程序»扫描引擎模式»切换到活动来手动切换到活动模式,因为扫描引擎必须处于活动模式才能与SolidWorks交互。
8.要停止仿真,请先停止VI。然后,在“项目资源管理器”窗口中右键单击SolidWorks装配体,然后选择“停止模拟”以停止SolidWorks中的运动模拟。
9.保存您创建的SolidWorks模型,LabVIEW项目和LabVIEW VI,以应用所做的任何更改。
下图 是测试了XY联合坐标系移动的测试,输入position触发execute上升沿后,可以看到龙门在同步运动。也可以测试单轴也多个轴。


自定义测试
在Solidwoks中自定义一个简单的装配体,包括一个平移副和一个旋转副;
分别在motion中添加一个直线马达和一个旋转马达:

仿真验证。
同上面的步骤,首先导入装配体:
添加轴:
部署:

若出错:
在装配体属性中修改最大步长:
同步到装配体:
开始仿真: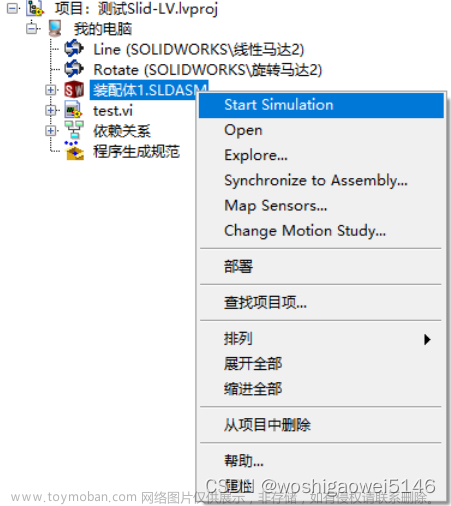
可以看到在Excute上升沿触发时,移动副和旋转副会同步运动;

总结
因为这次没有使用cRIO等硬件,所以算是软件在环仿真,也就是离线仿真。如果接上cRIO和电机,就算是在线仿真了。
虽然还算不上数字孪生,不过接上硬件把编码器实时传给模型,也算是一种单方向的数字孪生了(个人理解),毕竟功能有限。文章来源:https://www.toymoban.com/news/detail-537470.html
参考
https://mp.weixin.qq.com/s/LX3I9pTu828UDk8tXZjdGw文章来源地址https://www.toymoban.com/news/detail-537470.html
到了这里,关于LabVIEW-Solidworks联合仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!