常规PID、模糊PID和神经网络PID是三种常见的PID控制器变种,它们在控制算法和性能方面有所不同。
常规PID控制器是最常用的PID控制器,它根据系统的误差、误差变化率和误差积分值计算控制器输出,并使用比例、积分和微分系数来调整控制器的响应速度和稳定性。
模糊PID控制器是一种基于模糊逻辑的PID控制器,它使用模糊集合和模糊推理来计算控制器输出。模糊PID控制器根据系统的误差、误差变化率和误差积分值将其映射到模糊集合中,并使用模糊推理来计算控制器的输出。
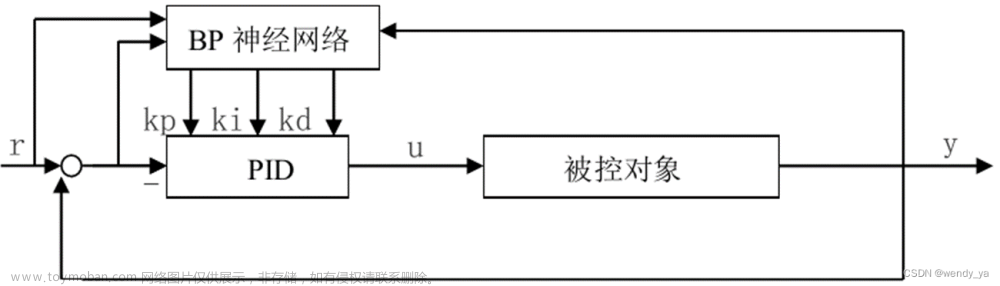
神经网络PID控制器是一种基于神经网络的PID控制器,它使用神经网络来学习系统的动态模型和控制器的参数。神经网络PID控制器使用系统的误差、误差变化率和误差积分值作为输入,并使用训练好的神经网络来计算控制器的输出。
这些PID控制器的性能和优缺点如下:
常规PID控制器的优点是易于实现和调试,但是在非线性、时变或多变量系统中可能会出现性能不佳的问题。
模糊PID控制器的优点是可以处理非线性、时变或多变量系统,并且可以通过调整模糊集合和模糊推理来优化控制器的性能。缺点是需要较大的计算量和复杂度。
神经网络PID控制器的优点是可以自适应地学习系统的动态模型和控制器的参数,并且可以处理非线性、时变或多变量系统。缺点是需要大量的训练数据和计算量。文章来源:https://www.toymoban.com/news/detail-538278.html
因此,选择PID控制器的类型应根据具体的应用场景和需求来确定。文章来源地址https://www.toymoban.com/news/detail-538278.html
到了这里,关于常规PID、模糊PID和神经网络PID的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!